




 广告
广告





















































一文读懂自动驾驶数据闭环
2021-09-21 18:17:01· 来源:智驾最前沿

2)地图定位:车辆定位中基于语义地图的方法,在语义目标提取也是采用深度学习模型,甚至语义地图的制作也是如此,目前感兴趣的地图更新(或者在线地图)多半需要检测语义目标。定位的后端也可以是数据驱动的解决,包括全局定位和相对定位,最近SLAM和深度学习的结合工作也如火如荼进行。
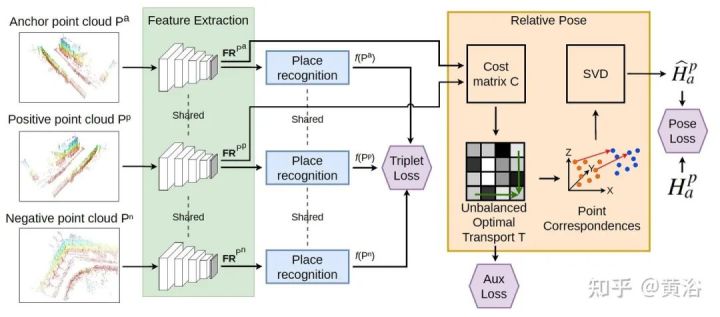
“LCDNet: Deep Loop Closure Detection andPoint Cloud Registration for LiDAR SLAM”

“DeepSFM: Structure From Motion Via DeepBundle Adjustment”

“HDMapNet: An online HD Map Construction and evaluation framework”
3)预测:障碍物的轨迹预测现在已经是自动驾驶发展至今的重点之一,现在重要性可以说是高于感知。如何建模智体行为、如何建模智体之间的交互和轨迹预测的动作多模态性,自然最佳方式是采用数据来训练。另外,感知-预测结合解决也是需要大量数据训练去得到合理的模型。

“Learning Lane Graph Representations for Motion Forecasting”
“PnPNet: End-to-End Perception and Prediction with Tracking in the Loop”
“Deep Multi-Task Learning for Joint Localization, Perception, and Prediction”

“TNT: Target-driven Trajectory Prediction”



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
