




 广告
广告





















































一文读懂自动驾驶数据闭环
2021-09-21 18:17:01· 来源:智驾最前沿

4)规划:规划问题可以是传统的规则方法,也可以是强化学习或者模仿学习,其中强化学习也需要数据学习惩罚/奖励和策略。目前人们关心规划的地域化和个性化问题,这个比起感知的类似问题解决起来更加困难,比如激进还是保守地进行换道超车和并道汇入。最近有讨论合并预测和规划的解决方法,甚至包括地图定位一起建模,这个没有数据的“喂养”是很难成立的。
“DSDNet: Deep Structured self-Driving Network”
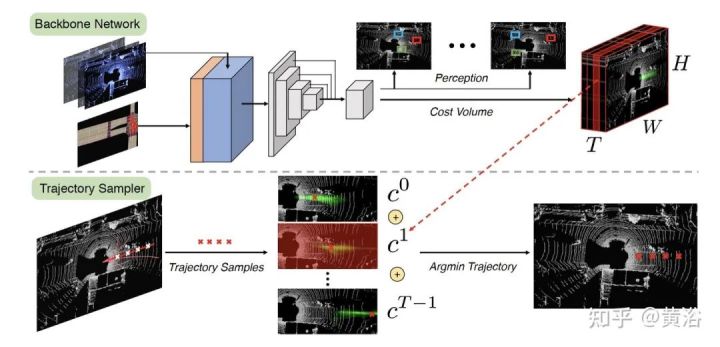
“End-to-end Interpretable Neural Motion Planner”
“MP3: A Unified Model to Map, Perceive,Predict and Plan”

“Probabilistic Anchor Trajectory Hypotheses For Behavior Prediction”
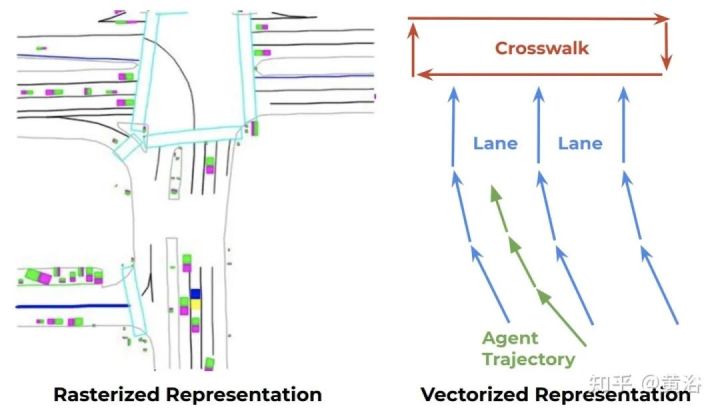
“VectorNet: Encoding HD Maps and Agent Dynamics From Vectorized Representation”
“Deep Imitation Learning for AV in Generic Urban Scenarios with Enhanced Safety”
“Perceive, Predict, and Plan: Safe Motion Planning Through Interpretable Semantic Rep”
5)控制:应该说,控制的传统方法相对成熟,不过并不是说数据驱动就没有价值,实际上规划和控制的确集成在一起建模也是大家感兴趣的领域,前面提到的强化学习和模仿学习同样是不错的解决手段。
“A Fast Integrated Planning and Control framework for AV via Imitation Learning”
“Deep Imitative Models For Flexible Inference, Planning, And Control”



 广告
广告  广告
广告
编辑推荐




最新资讯
-
挑战全球高温气候极端场地|中国汽研智能网
2025-02-24 20:26
-
EV/EVSE强检标准上路,Chroma为您全力把关!
2025-02-24 20:18
-
智能网联公司与澳大利亚ANCAP开展技术交流
2025-02-24 16:14
-
《汽车轮胎干路面制动距离试验方法》等团体
2025-02-24 16:13
-
突然解散!又一智驾公司总部封楼!
2025-02-24 12:09
 广告
广告 广告
广告
