




 广告
广告





















































一文读懂自动驾驶数据闭环
2021-09-21 18:17:01· 来源:智驾最前沿

5 模型测试和检验
模型的测试和检验可以分成多种方式:
一是仿真测试检验。建立仿真测试环境,比如开源的一些软件平台:
-
Carla

-
AirSim
-
LGSVL

还有一些成熟的商用软件,也可以构建仿真测试环境:Prescan和VTD。存在一些仿真子模块,比如开源的交通流仿真方面SUMO,商用的动力学仿真方面CarSim、Trucksim和Carmaker等。测试方式包括模型在环(MIL)、软件在环(SIL)、硬件在环(HIL)和整车在环(VIL)等。传感器的仿真,特别是摄像头的图像生成,除了图形学的渲染方式,还有基于机器学习的方式。
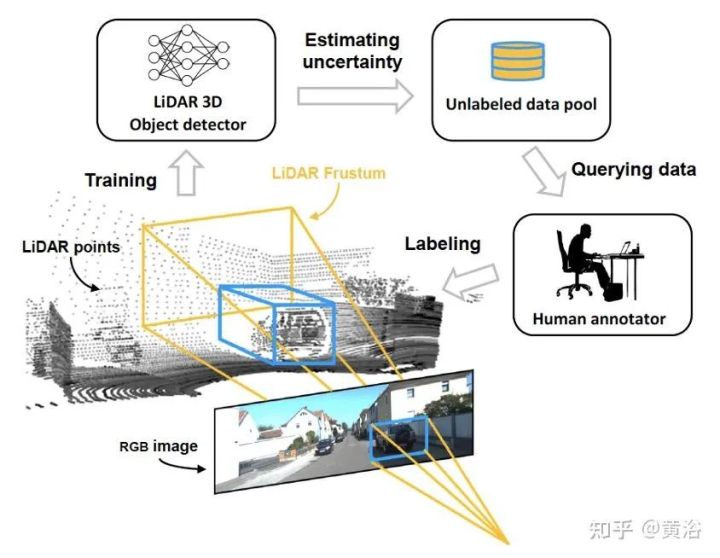
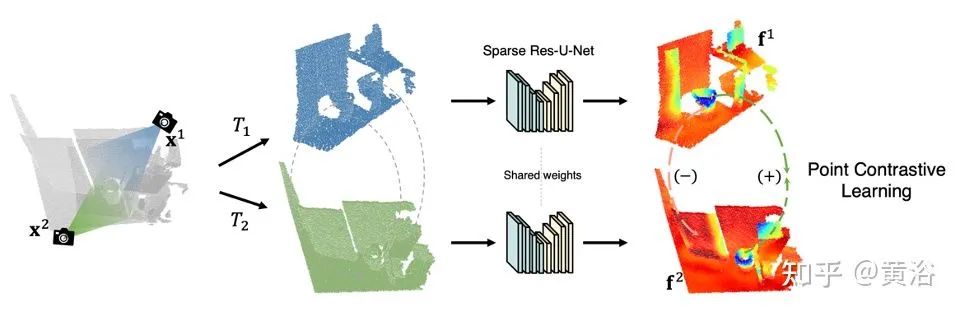
这里列出Uber ATG发表的一系列仿真建模论文:
-
“LiDARsim: Realistic LiDAR Simulation by Leveraging the Real World“
-
”S3: Neural Shape, Skeleton, and Skinning Fields for 3D Human Modeling“

-
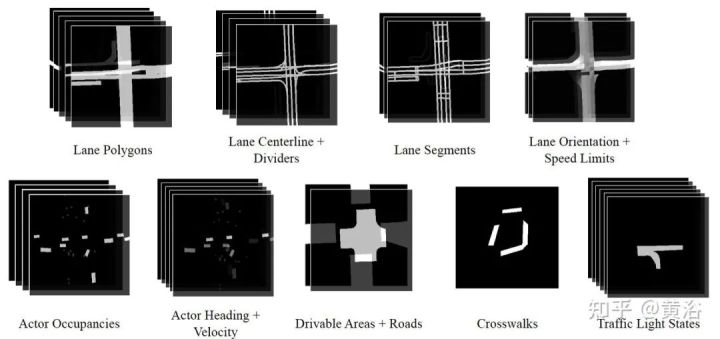
”SceneGen: Learning to Generate Realistic Traffic Scenes“
-
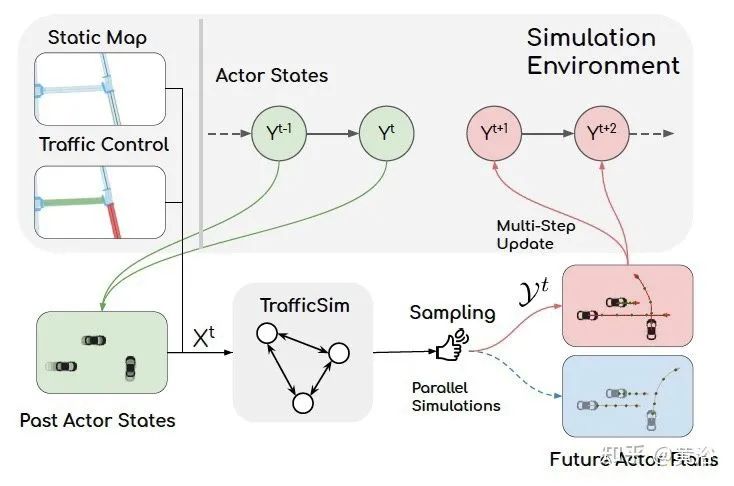
”TrafficSim: Learning to Simulate Realistic Multi-Agent Behaviors“
-
”GeoSim: Realistic Video Simulation via Geometry-Aware Composition for Self-Driving“
-
“AdvSim: Generating Safety-Critical Scenarios for Self-Driving Vehicles“

另外谷歌Waymo最近推出的传感器仿真工作:
-
”SurfelGAN: Synthesizing Realistic Sensor Data for Autonomous Driving“

二是封闭场地的实车测试检验。各大车企都有自己的测试基地,现在自动驾驶方面也可使用。其开销远大于仿真系统。
谷歌waymo测试场



编辑推荐




最新资讯
-
imc/GRAS/AP首次联袂亮相ATE India 盛会
2025-04-11 13:49
-
GB/T 31486-2024 与 GB/T 31484-2015 修改
2025-04-11 13:48
-
标准介绍丨ASAM ARTI 运行实时接口
2025-04-11 10:29
-
自动驾驶中基于深度学习的雷达与视觉融合用
2025-04-11 10:25
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
