




 广告
广告





















































清华大学车辆与运载学院智能驾驶课题组荣获IEEE ITSC 2021最佳学生论文奖
2021-09-28 16:24:39· 来源:清华大学车辆与运载学院

2021年9月19日至22日,第24届IEEE国际智能交通系统会议(IEEE ITSC 2021)于美国印第安纳波利斯召开。车辆学院李升波老师指导的博士生关阳,任彦刚,马海铜等人
2021年9月19日至22日,第24届IEEE国际智能交通系统会议(IEEE ITSC 2021)于美国印第安纳波利斯召开。车辆学院李升波老师指导的博士生关阳,任彦刚,马海铜等人,以清华大学为单位发表的论文《Learn Collision-Free Self-Driving Skills at Urban Intersections with Model-based Reinforcement Learning》荣获“最佳学生论文奖”(Best Student Paper Award)。此次会议共收到全球20余个国家和地区的近1000篇投稿,录用597篇,这是获奖的六篇优秀论文之一(3篇最佳论文奖,3篇最佳学生论文奖)。

关阳、任彦刚、马海铜等同学共同发表的论文
荣获第24届IEEE国际智能交通系统会议“最佳学生论文奖”
该研究工作以高级别自动驾驶汽车为对象,首次提出了面向城市交通场景的集成式决控(Integrated Decision and Control, IDC)框架,以提高城市道路高复杂、高随机、高密度行车工况的驾驶智能性。与当前分层式决控框架(图1(a))不同,集成式决控(图1(b))将决控过程分解为静态路径规划与动态最优跟踪两个模块。前者仅考虑静态道路信息生成备选路径集合;后者进一步结合车辆模型与动态交通信息,构造约束型最优跟踪问题,特别地,该模块使用带模型强化学习算法实现这一问题的离线求解,得到评价函数与策略函数,分别用于实时在线路径选择与避撞路径跟踪。
仿真与实车实验表明,集成式决控框架可实现良好的驾驶智能性。首先,通过离线训练,在线应用的手段,该框架缓解了车载算力受限条件下决控实时性与求解最优性的矛盾,与分层式框架相比,在计算效率上实现了一个数量级的跃升;此外,该框架具备不同驾驶场景的可扩展性,其静态路径规划模块可融合人类先验知识实现分别设计,而动态最优跟踪模块则构造并求解一个与行车场景解耦的最优控制问题。这一研究为高级别自动驾驶决控技术提供了新的范式。
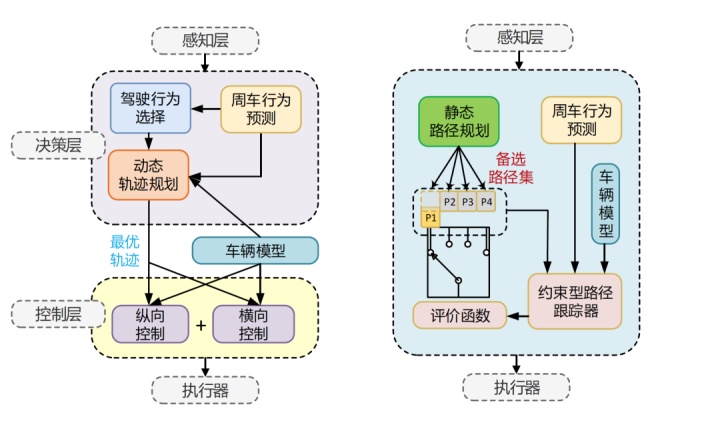
(a)分层式决控框架 (b)集成式决控框架
图1. 分层式决控与集成式决控框架对比
注:IEEE ITSC全称“IEEE International Conference on Intelligent Transportation Systems”,是智能汽车与智能交通领域的国际顶级学术会议之一,每年召开一次。
- 下一篇:自动驾驶概述
- 上一篇:康明斯氢能中国总部项目落地上海临港



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
