




 广告
广告





















































李骏院士团队:自动驾驶汽车目标检测算法的不确定性评价
2021-09-29 21:16:37· 来源:清研汽车研习社

论文题目:Uncertainty evaluation of object detection algorithms for autonomous vehicles作者:彭亮,王红,李骏转自:汽车学会本文从自动驾驶汽车的复杂目
论文题目:Uncertainty evaluation of object detection algorithms for autonomous vehicles
作者:彭亮,王红,李骏
转自:汽车学会
本文从自动驾驶汽车的复杂目标检测算法中提取出其认知不确定性,随后根据认知不确定性与算法置信度间的关系优化了评价体系,并通过特定预期功能安全(SOTIF)场景下的实验结果验证了所提方法的可行性和有效性。
主要研究内容:
(1)YOLOv3网络架构调整
基于Monte-Carlo Dropout方法对YOLOv3网络架构进行了调整,使得目标检测算法在识别物体的同时,量化得到相应的认知不确定性。

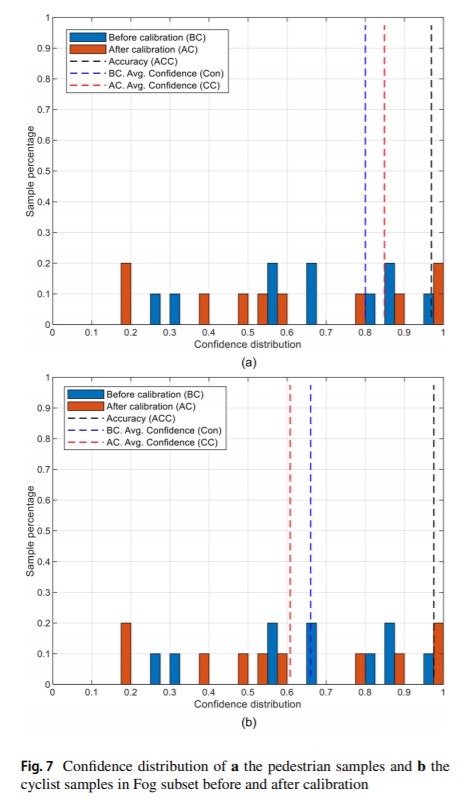
(2)置信度修正
本文还利用认知不确定性对算法置信度进行了修正。遵循不确定度高时置信度应调低,不确定度低时置信度应调高的规律,在设计修正因子时保证期望不变。结果表明,修正后的平均置信度大多数情况都实现了向准确率的靠拢,仅在样本少且漏检多的cyclist类别出现了失误。
(3)目标检测算法评价体系的优化
使用修正后的置信度进行mAP等目标检测算法评价指标的计算,优化后的目标检测算法mAP评价体系如Fig. 1所示。

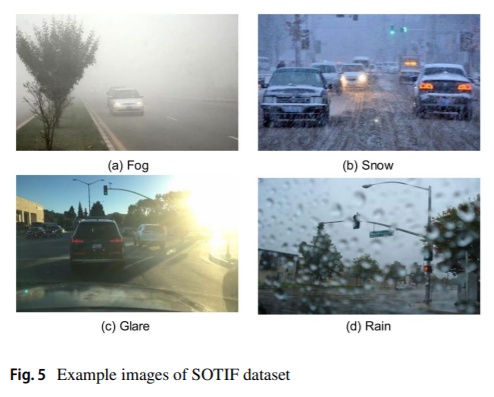
(4)SOTIF场景库建立
建立了一个感知SOTIF场景库,其中包括各种极端天气和不利光照条件下的道路图像。
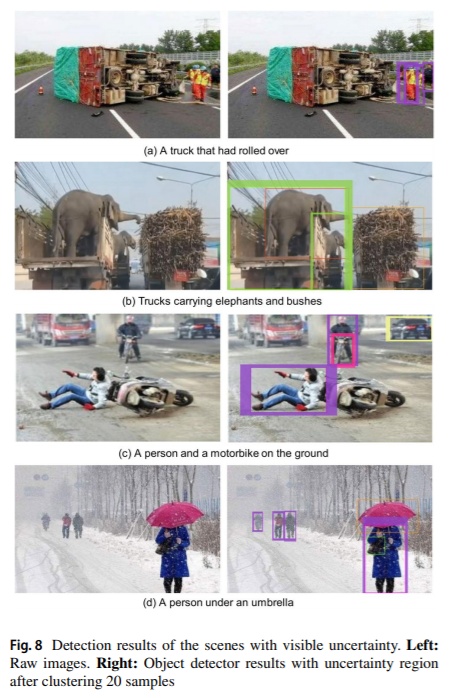
(5)实验验证
将SOTIF场景库提供给目标检测算法识别,场景库中有近三百张从车辆视角获取的图片参与了测试,涵盖了不同道路、不同季候、不同时刻、不同天气的多元化场景。实验结果验证了所提方法的可行性和有效性。
引用词条
Peng, L., Wang, H. & Li, J.: Automotive Innovation (2021)







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
