




 广告
广告





















































纯电动汽车整车控制器软件设计
2021-10-03 19:35:19· 来源:电动笔记侠

作者:电动笔记侠来自:湖南猎豹汽车股份有限公司本文以某纯电动汽车为研究对象,分析其整车控制需求,设计满足控制要求的整车控制器软件。1. 整车控制需求某电
作者:电动笔记侠
来自:湖南猎豹汽车股份有限公司
本文以某纯电动汽车为研究对象,分析其整车控制需求,设计满足控制要求的整车控制器软件。
1. 整车控制需求
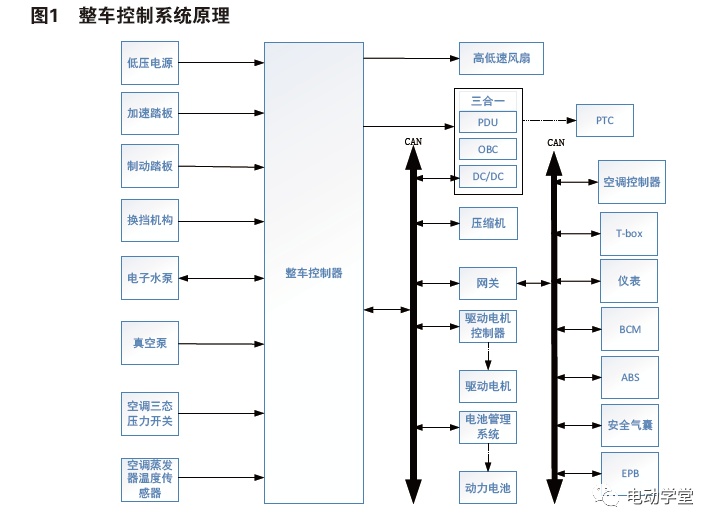
某电动汽车为前置前驱的纯电动车型,整车控制系统原理如图1所示。与整车控制相关的高压系统包括电池管理系统(动力电池)、驱动电机控制器、三合一控制器(PDU/OBC/DCDC)和压缩机等,低压系统部分主要有电动真空泵、电子水泵、高低速风扇和仪表等。
整车控制器通过采集加速踏板、制动踏板、换挡机构、驱动电机和动力电池等部件的状态信息,判断驾驶员操作意图,根据相应的控制策略和算法,得到整车所需的驱动扭矩或部件控制状态,将相应指令发送给驱动电机、动力电池等,以实现驾驶员对车辆的有效控制,同时保证车辆的动力经济性、平顺性和安全性。
2. 控制软件架构
整车控制器软件采用基于模型的开发方式,在MATLAB/Simulink中建立整车控制策略模型,进行相应的仿真测试后,通过MATLAB/EmbeddedCoder自动生成代码,与基础软件集成编译下载到整车控制器中,经过硬件在环测试、实车道路标定和整车试验等一系列测试验证,最终完成整车控制器软件开发。整车控制器软件分为应用层和基础软件层,软件架构如图2所示。
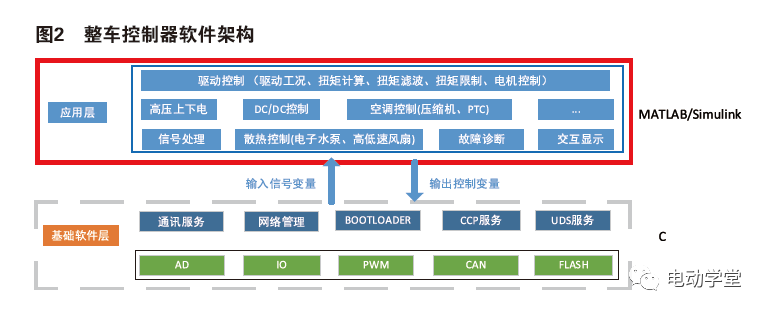
应用层是整个控制器软件的核心层,包含高压上下电、驱动控制、故障诊断等整车控制策略,采用MATLAB/Simulink开发;基础软件层包括:CCP服务、UDS服务、BOOTLOADER和网络管理等模块以及硬件驱动模块,硬件驱动模块为控制器IO、AD、CAN和FLASH等硬件资源驱动函数,基础软件层采用C语言编写。
3. 整车控制器软件策略设计
3.1 高压上下电管理
电动汽车高压系统上下电管理分三种模式:驱动模式、慢充模式(交流充电)和快充模式(直流充电),如图3所示。

驱动模式是指由用户通过车辆启动按键触发,BCM执行唤醒整车控制器动作,整车控制器主导控制高压系统上下电流程。慢充模式是指由用户通过插入交流充电枪触发,电池管理系统执行唤醒整车控制器动作,整车控制器配合完成交流充电过程。快充模式是指由用户通过插入直流充电枪触发,直流充电流程由电池管理系统和直流充电桩交互完成,整车控制器可对充电过程进行监控。
驱动模式和慢充模式下高压系统上电完成状态的判定条件为:整车控制器发出主正接触器闭合的指令后,电池管理系统执行并反馈主正、主负接触器处于闭合状态且预充接触器断开,整车控制器才会认定高压系统完成上电。
为保证高压系统上电安全,在高压系统上电前和预充过程中,整车控制器需控制所有高压用电部件处于停止工作状态。特别是压缩机、PTC和DC/DC,在确认高压系统完成上电后,才可以进入到工作状态。
3.2 驱动控制
驱动控制策略被分为驱动工况、扭矩计算、扭矩滤波和扭矩限制等模块,如图4所示。

驱动工况分为蠕动,加速,滑行和制动工况,通常定义条件如下:
3.2.1 蠕动工况的判断条件
(a)无制动信号;(b)加速踏板开度不大于某定值;(c)车速不大于某定值。
3.2.2 加速工况的判断条件
(a)无制动信号;(b)加速踏板开度大于某定值。
3.2.3 滑行工况的判断条件
(a)无制动信号;(b)加速踏板开度不大于某定值;(c)车速大于某定值。
3.2.4 制动工况的判断条件
(a)有制动信号。扭矩计算模块根据驱动工况采用不同的输入信号进行需求扭矩计算。蠕动工况下以车速作为输入信号进行查表得到需求扭矩,对于车辆溜坡的情况还需要进行特殊控制。在加速工况下,根据加速踏板开度和车速查询扭矩MAP来得到需求扭矩,因为车辆设置有经济模式和动力模式,则分为两个不同的扭矩MAP,满足动力模式、经济模式下不同的加速性、能耗等要求。
滑行工况和制动工况可以根据当前车速计算需求扭矩,因该车型可以采集制动踏板开度信号,则将制动开度引入作为制动工况扭矩计算的输入,可以提高制动工况下的能量回收率。
3.3 附件控制
3.3.1 DC/DC控制
在驱动模式或慢充模式下,确认高压系统完成上电后,整车控制器使能DC/DC。高压系统下电时,关闭DC/DC。整车控制器通过采集蓄电池电压识别DC/DC故障,当整车控制器使能DC/DC后,如蓄电池电压连续一段时间内小于某定值,则判定DC/DC出现故障。
3.3.2 散热控制
电动汽车动力系统的散热由电子水泵和高低速风扇实现。高压系统上电后,整车控制器将首先控制电子水泵工作在低转速状态,然后根据驱动电机、电机控制器、DC/DC和OBC的温度情况,依次采取提高电子水泵工作转速、打开低速风扇、打开高速风扇的措施对动力系统进行散热。高低速风扇采用滞环控制,防止风扇频繁启停。
3.3.3 空调控制
整车控制器根据空调控制器的输入信息进行空调压缩机和PTC工作控制。当压缩机工作时,还需结合三态压力开关信号,对高低速风扇进行控制。压缩机启动时,低速风扇开始工作;中压开关闭合时,高速风扇开始工作。
4. 结语
本文以某电动汽车为对象,根据其整车控制需求,采用基于模型的方式进行整车控制器软件开发,对高压上下电、驱动控制和附件控制模块进行控制策略设计,实现了整车控制目标。
- 下一篇:乘用车NVH 性能商品性评价方法
- 上一篇:苹果电动汽车热管理技术研究



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
