




 广告
广告





















































【SAECCE2021会议日程剧透】汽车运动性能动力学与控制
2021-10-09 22:13:37· 来源:SAECCE年会暨展览会

2021中国汽车工程学会年会暨展览会(SAECCE 2021)将于10月19-21日在上海汽车会展中心举行。邀请汽车及相关行业的院士、企业高层、技术领军人物、资深专家学者、
2021中国汽车工程学会年会暨展览会(SAECCE 2021)将于10月19-21日在上海汽车会展中心举行。邀请汽车及相关行业的院士、企业高层、技术领军人物、资深专家学者、广大科技工作者,通过高层访谈、院士论坛、专题讨论、国际论坛、论文交流、技术展览等形式,讨论行业热点,引领前瞻技术发展方向。以“汽车+X,双碳背景下汽车科技创新”为主题,围绕汽车电动化、智能化、网联化、共享化的发展趋势,深度探讨跨产业协同衔接,统筹推进汽车与能源、交通、信息通信等产业深度融合。

车辆动力学性能(包括操纵稳定性、乘坐舒适性、动力加速性和制动安全性)是汽车的核心竞争力,车辆动力学技术是我国汽车工业实现底盘自主开发,形成国际竞争力的重要共性核心技术,包括车辆动力学建模、仿真、试验测试及评价、控制等关键理论与技术方法。
本年度分会将在传统车辆动力学的基础上,重点关注汽车运动品质关键理论和技术,主要关注汽车运动品质建模、仿真方法,提升汽车运动品质的开发方法和关键零部件开发。
中国汽车工程学会携手吉林大学汽车仿真与控制国家重点实验室,将于10月19-21日在上海汽车会展中心举办的“2021中国汽车工程学会年会暨展览会(SAECCE2021)”期间,特别策划和组织专题分会:汽车运动性能动力学与控制。
会议时间&地点
2021年10月20日 13:30-15:30
上海汽车会展中心
(上海市嘉定区博园路7575号)
协办单位
吉林大学汽车仿真与控制国家重点实验室
会议主席
管欣
吉林大学汽车研究院
院长、教授

管欣,工学博士,长江学者特聘教授,吉林大学汽车研究院院长、兼任中国汽车工程学会副理事长、吉林省政府参事。
主要学术贡献:(1)1993年开始成功主持研制了投资达2500万元的中国首台汽车性能模拟器,国家验收时被评价为性能和规模亚洲第一、世界先进水平,并成功应用到我国十多款自主品牌汽车的开发中。(2)在国际上率先提出增加静动摩擦建模、车轮胎体动力学、转向机构完整建模,成功解决了经典模型不准确仿真高速汽车回正、抖振、摆振等瞬态过程的难题。(3)在国际上率先提出了汽车方向与速度综合控制的驾驶员模型,实现了单一模型适用于绝大多数智能驾驶工况,实现了满足智能汽车L3以上等级的一种独特创新模型方案。
联合会议主席
詹军
吉林大学汽车研究院
副院长、教授

詹军,教授,博士生导师,吉林大学汽车研究院副院长。任ISO道路车辆动力学仿真组技术专家、中国汽车标准化委员会车辆动力学分标委副秘书长,汽车与保险大数据产业联盟技术委员会专家。
主要从事车辆动力学与控制、智能汽车控制与测试、整车性能集成与匹配等方法和技术研究。研究成果包括高精度汽车动态品质动力学模型、智能汽车虚拟测试关键技术、整车性能逐层分解及集成匹配关键技术等。
会议日程安排
|
演讲题目
|
演讲人
|
演讲人工作机构、职务
|
|
主机厂在新四化时代的基本功
|
吴旭亭
|
广州汽车集团汽车工程研究院首席专业总师
|
|
汽车底盘性能评价及未来发展趋势
|
赵永坡
|
长城汽车股份有限公司技术中心副总经理
|
|
分布式驱动电动汽车动力学与底盘协调控制研究
|
殷国栋
|
东南大学机械工程学院教务处处长、首席教授
|
|
复合工况下车辆稳定性分析与控制
|
许男
|
吉林大学汽车仿真与控制国家重点实验室副教授
|
演讲嘉宾演讲摘要提前看
1、主机厂在新四化时代的基本功
吴旭亭
广州汽车集团汽车工程研究院
首席专业总师
演讲要点:
1. 以用户体验为中心,快速定义产品的主导能力
2. 强化传统车企的优势,打造汽车作为出行工具的核心功能和性能的突出能力
3. 不断提升系统整合水平,打造有鲜明品牌形象产品的能力
4. 广汽的新车型底盘开发实践
2、汽车底盘性能评价及未来发展趋势
赵永坡
长城汽车股份有限公司
技术中心副总经理
演讲要点:
1. 如何评价汽车的底盘性能
2. 底盘的动力学评价
3. 其他性能评价
4. 底盘技术的未来发展趋势
3、分布式驱动电动汽车动力学与底盘协调控制研究
殷国栋
东南大学
教授、机械工程学院教务处处长

演讲要点:
发展纯电动汽车技术是解决环境污染和能源危机的根本手段,也是我国“十四五”规划中的“铁令”。分布式驱动电动汽车作为其构型中的一种,采用轮毂电机作为驱动单元,省去了复杂的传动系统,最大程度地释放了车身空间,有效提高了动力传输效率。集中于轮内的布置方式提升了汽车的转向限度,电气制动与摩擦制动并存便于再生制动策略的设计,轮胎力矢量控制技术赋予了车辆多种动力学行为。然而随着底盘子系统的增加,各基本控制单元功能冲突干涉逐渐明显,传统的分层式集中控制方法不仅设计难度增大,同时也使得系统缺乏柔性,极大地限制了分布式驱动电动汽车动力学性能的释放。为了最大程度地协调不同子系统的控制要求,本团队建立了基于多Agent系统的底盘智能动态协调架构。将子系统作为最小Agent单元,建立总体的协调机制,通过Agent之间的相互协作实现了各个子系统的控制目标。基于多Agent框架,深入研究了转向Agent、驱动Agent、制动Agent以及悬架Agent的协调策略,建立了描述横向以及侧倾稳定裕度的相平面集,提出了基于多约束分布式模型预测的系统集成方法,设计了表征Agent合作博弈的多目标函数组合,并采用帕累托最优理论进行求解,充分协调了底盘子系统的功能重叠和控制冲突矛盾,同时提升了车辆整体的横向、侧倾稳定性以及乘坐舒适性。
4、复合工况下车辆稳定性分析与控制
许男
吉林大学
汽车仿真与控制国家重点实验室
副教授
演讲要点:
1. 复合工况轮胎高精度模型
2. 车辆稳定性分析及稳定性指标设计
3. 面向控制的复合工况轮胎模型
4. 基于模型预测的复合工况操纵稳定性控制器设计
关于2021 SAECCE
SAECCE 中国汽车工程学会年会暨展览会
时间:2021年10月19-21日
地点:上海汽车会展中心
大会规模:
-
1 天全体大会,70+ 场专题&技术分会,500+ 演讲嘉宾
-
10,000㎡ 展览面积,100+ 家来自国内外的展商
-
15,000+ 人次参会嘉宾&参观观众

SAECCE2021日程框架
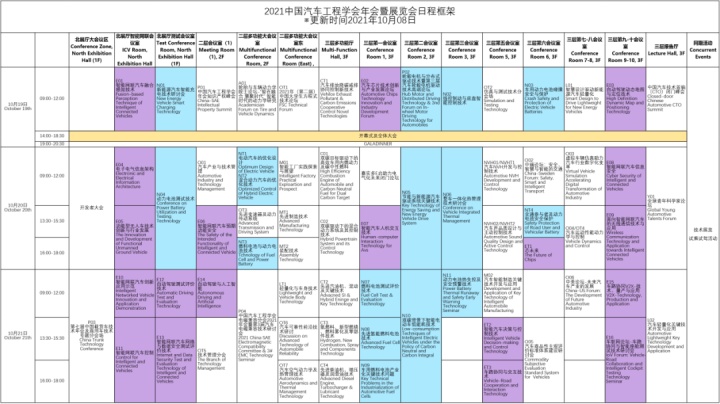
想了解更多会议日程,长按下方二维码
即可报名参会/免费参观!




编辑推荐




最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
