




 广告
广告





















































干货分享|浅谈智能汽车预期功能安全
2021-10-15 13:57:05· 来源:国汽智联

本文作者:国家智能网联汽车创新中心 李红博士 一、预期功能安全提出的背景智能驾驶作为智能制造互联网+时代的产物,将引领汽车产业生态及商业模式的全面升级与
本文作者:国家智能网联汽车创新中心 李红博士
一、预期功能安全提出的背景
一、预期功能安全提出的背景
智能驾驶作为“智能制造”“互联网+”时代的产物,将引领汽车产业生态及商业模式的全面升级与重塑,世界汽车强国已将智能驾驶纳入其战略部署中。受当前科学与技术水平的影响,智能驾驶在提供便捷的同时,也带来潜在风险,如因智能驾驶系统因设备性能局限、算法缺陷、运行环境因素干扰等引起的系统功能不足以及合理可预见的人为误用等导致的人员伤害。
为提高智能驾驶的安全性,国际标准化组织工作组(ISO/TC22/SC32/WG8)2016年2月启动ISO21448的研究工作,2018年6月正式启动该标准的制定工作,2019年1月发布ISO/PAS21448版,2019年12月发布ISO21448CD版,2020年11月发布ISO21448DIS版,并计划于2022年3月发布最终版,研制过程如图1所示。

图1 ISO21448研制过程示意图
二、预期功能安全概念、研究目的及其研究内容
2.1 概念
标准ISO21448给出预期功能安全的概念为:“The absence of unreasonable risk due to these potentially hazardous behaviours related to these functional insufficiencies is defined as the safety of the intended functionality (SOTIF)”,理解为“SOTIF被定义为不存在功能不足相关的潜在危害行为导致的不合理的风险”。
预期功能安全即SOTIF要解决的问题有哪些?结合ISO21448提供的案例与相关经验,初步将其总结为包含但不仅限于以下几点:
-
设备性能的局限导致的危险,如感知设备的探测范围、精度、分辨率或因光照过强或过暗导致的感知功能不足,如定位设备受高架桥、楼宇等影响产生信号延迟或丢失导致定位功能不足等导致的危险;
-
算法缺陷导致的危险,如因训练样本量或多样性不足而产生的感知算法泛化能力局限导致的感知功能不足产生的危险;
-
人员误用导致的危险,如因驾驶员对系统功能边界认知不足而错误使用,或因人机交互系统未充分理解使用者操作意图而导致的错误使用等危险。
2.2 研究目的
预期功能安全的目的为:基于需求分析、方案设计、安全分析、单元测试、集成测试、验证、确认、检测、监控、维护、组织、管理等先进科学与技术通过自动驾驶全生命周期各阶段的活动,将预期功能引发的相关风险最小化,如图2、图3所示。
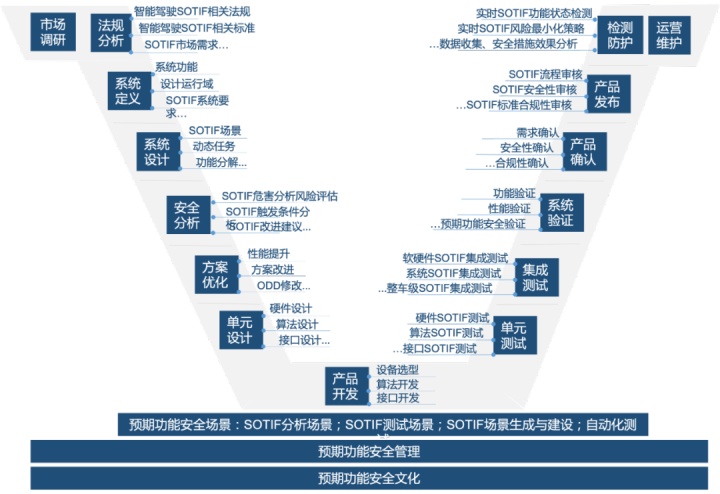
图2 预期功能安全开发流程示意图
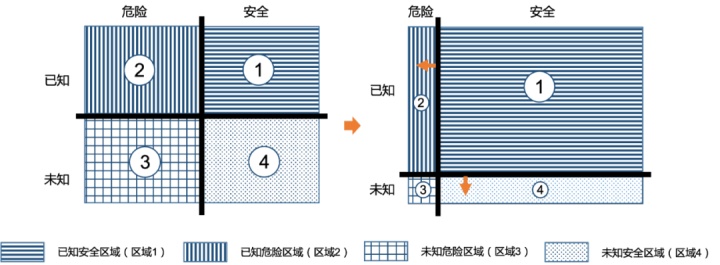
图3 SOTIF研究将未知不安全场景减少示意图
2.3 研究内容
智能汽车是集环境感知、决策、执行多等级辅助驾驶等功能于一体的综合复杂系统,预期功能安全要解决的是综合复杂智能驾驶系统在多样、复杂、多变、未知的场景中面临的安全性问题,因此预期功能安全的研究内容也是多样的,由于篇幅有限,以下仅从开发与测试角度对其研究内容进行简述。
2.3.1智能汽车开发角度
系统或产品的开发是基于多方面多维度的需要与需求分析,根据需要与需求确定系统或产品要具备的功能,即系统功能定义,同时根据需求分析系统或产品的运行环境,及系统或产品的运行设计域ODD的定义,根据系统或产品的需求与ODD确定不同场景下的动态任务即系统的DDT。预期功能安全的在开发阶段的活动简述有:
-
预期功能安全可接受风险水平定义与设计,基于法规、标准、目标市场、客户等对智能驾驶系统的安全水平要求,确定智能驾驶系统预期功能安全可接受风险水平;
-
根据系统或产品的功能分析功能失效或弱化的模式,结合不同动态任务DDT运行的环境,对系统预期功能安全相关的危害与风险进行分析与评估;
-
若活动(2)中预期功能安全的风险不被接受,则对不被接受风险的原因进行分析,结合系统实现智能化的机理、存在的性能局限、算法可能存在的缺陷、环境因素、人员操作因素等,分析危害事件触发条件;
-
基于活动(3)的分析结果,完善对系统或产品的要求,给出系统或产品的改进措施或完善建议,改进措施包含但不局限于:
a) 提高硬件设备的性能;
b) 提供智能算法的性能;
c) 通过异构设备冗余或异质算法冗余,提高系统能力;
d) 修改系统ODD。
2.3.2智能汽车测试角度
在系统投入使用之前对其功能、性能、安全性等进行测试,可在系统或产品正式投入量产与使用之前发现产品或系统的缺陷,及时对已有方案进行改进与完善。测试基于场景设计与场景构建,因此智能汽车预期功能安全测试还包括对预期功能安全场景研究与设计,以及预期功能安全场景实现技术。在此将智能汽车预期功能安全测试活动简括为:
-
智能驾驶预期功能安全测试方案研究与设计,即针对部件级、算法级、系统级、整车级等不同集成程度的测试内容、评价指标与标准、测试流程研究与制定;
-
预期功能安全测试场景设计与构建,即基于场景自动生成与大规模测试技术的虚拟仿真手段、软硬件结合的在环测试手段、客观真实且具备针对性的场地测试手段、丰富多样的道路测试手段等实现智能汽车预期功能安全测试场景的设计与构建。
三、总结与展望
标准ISO21448给出了预期功能安全相关的基本活动框架,目前还不容易实施。若提出一种可行、可信、可实施的预期功能安全开发流程与量化且有效的测评方法,将有助于预期功能安全相关开发活动的实施,有利于从产品开发的需求分析、概念定义、设计开发、验证确认、运行维护等生命周期多阶段提升智能驾驶系统或产品的安全性。
为促进我国智能驾驶系统预期功能安全与产品的快速落地与应用,2020年5月,国家智能网联汽车创新中心联合行业机构发起成立中国智能网联汽车产业创新联盟“智能网联汽车预期功能安全工作组”,对智能驾驶系统预期功能安全科学问题与前沿技术进行研究,旨在提出可行、有效的解决方案。同时,创新中心也在积极进行预期功能安全相关标准体系的研究,期望通过标准提升智能驾驶系统开发、测试、评价等活动的规范化与流程化。
参考文献:
-
预期功能安全国际标准ISO21448及中国实践白皮书
-
ISO/DIS21448 Road vehicles-Safety of the intended functionality
-
智能网联汽车预期功能安全场景库建设报告



编辑推荐




最新资讯
-
FLIR E8 Pro热像仪:汽车漏水检测的“火眼
2025-04-08 10:34
-
德法英日韩之后,瑞士也允许L3上路了
2025-04-08 07:56
-
泽尔测试战略入股赛孚汽车科技,布局汽车安
2025-04-07 17:33
-
每秒采集100万个数据 | 下一代USB DAQ产品-
2025-04-07 14:12
-
重型商用车辆和客车的动力学——振动环境
2025-04-07 14:11
