




 广告
广告





















































汽车串行器/解串器SerDes:实现更好的ADAS摄像头
2021-10-20 22:39:17· 来源:北京市高级别自动驾驶示范区

无论是手机还是超高清电视屏幕,高动态范围图像(HDR)摄像头不再局限于提供流行的视觉效果。越来越多的高性能摄像头支持高级驾驶辅助系统(ADAS)和自动驾驶车
无论是手机还是超高清电视屏幕,高动态范围图像(HDR)摄像头不再局限于提供流行的视觉效果。越来越多的高性能摄像头支持高级驾驶辅助系统(ADAS)和自动驾驶车辆(AV)应用。以Waymo为例,其第五代自动驾驶汽车上至少装有29个摄像头,另外还有5个激光雷达和6个雷达。

未来的自动驾驶汽车将需要支持3到40 GBit/s(约1.4到19 TB/h)的总带宽,其中摄像头生成的数据最多。
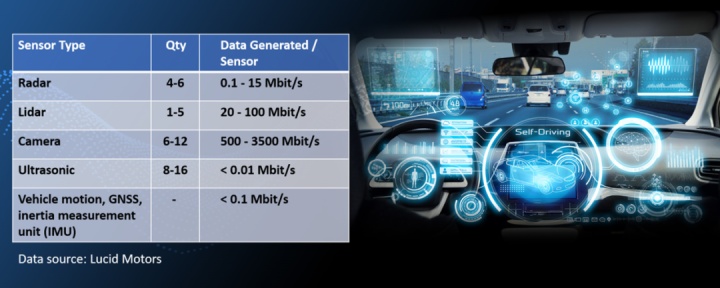
图1:在ADAS和AV传感器中,摄像头每秒产生的数据量最大。数据来源:Lucid Motors
车载网络-分域架构
这些不同类型的传感器在底板中使用不同的数据速率,汽车工程师面临的挑战之一是如何通过分域架构降低车内网络的复杂性。
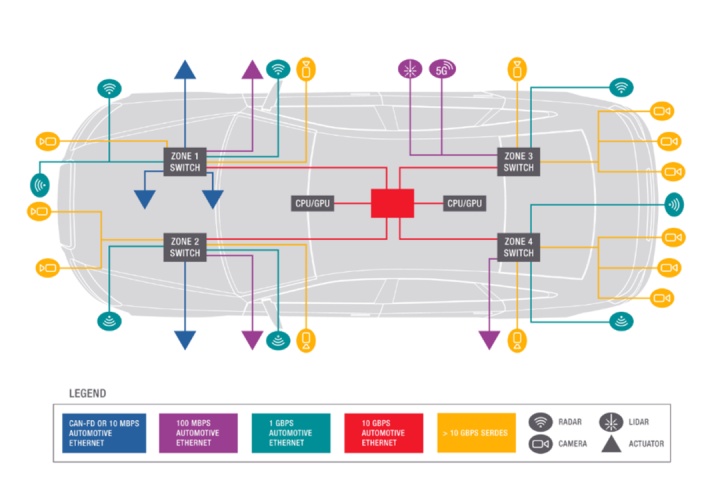
图2:基于域的车内网络架构概念图
图2是分区架构的简略展示:不同类型的传感器聚合到不同的分区中,汽车以太网充当各分区或域之间的互连。
汽车SerDes作用越发重要
ADAS的摄像头传感器需要高数据速率和传输速度才能按设计运行。开发人员越来越多地转向串行器/解串器(SerDes)连接,将这些摄像头连接到车辆的图像处理电子控制单元(ECU),如图2中的浅橙色互连所示。这种SerDes连接将并行数据转换为串行数据(反之亦然),从而能够使用成本较低的电缆和连接器在设备之间实现更快的通信。
目前,SerDes解决方案由各供应商使用封闭的专有标准交付,但这种情况即将改变。业界认识到,透明统一的标准和测试要求将促使芯片供应商、汽车一级供应商和汽车制造商加快开发周期、降低成本并提升与其他商用设备的互操作性。
行业已在解决SerDes在车辆联网方面面临的一些紧迫挑战,例如验证:
• 不同媒体相关接口(MDI)电缆和连接器之间的互操作性
• 发送器、互连和接收器性能的完整性
• 系统对各种电磁干扰(EMI)的鲁棒性
• 从物理层到整个协议栈的网络安全
互操作性是一个真正的问题。收发器是敏感设备,必须经过仔细测试,以确保能在严峻汽车环境中工作,包括高温、振动、静电放电和电磁干扰。让我们看一些收发器测试的例子。
发送器测试
就发送器而言,必须确保发射信号的特性良好。

图3:有丢包情况的后视ADAS安全摄像头
图3是一个带有水平线的汽车倒车摄像头视图示例。这些线路是由传输间隙造成的丢包。驾驶员可能仍然能够看到丢失掉几个数据包的图像,但如果有小孩突然出现在倒车车辆后面时,传输出现黑闪闪烁,这将是灾难性的!
有多家供应商参与了这一安全功能的实现:摄像头制造商、电缆供应商和发送信号的开关供应商,以及处理数据的GPU或ECU,还有最终用来停车的制动器。我们可以看出为什么整体互操作性至关重要。
信道测试
链路或信道测试对于确保发送器和接收器之间的信号完整性至关重要。鉴于恶劣的汽车环境中使用的电缆长度,查看阻抗与频率的关系对于预测信道在车内的性能也是不可忽视的一环。
链路部分包括电缆和内联连接器,以及两端的匹配连接器。最终,线束负责传输控制和有效负载数据,以及为远程传感器提供直流电源。
SerDes链路的信道特性包括时域和频域分析。这需要查看布线系统、媒体相关接口(MDI)以及固定装置和测试设置要求。
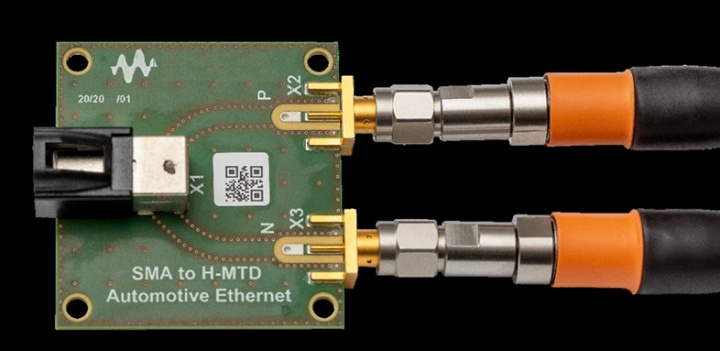
图4:带有H-MTD和SMA的媒体相关接口(MDI)连接器示例
实际的MDI连接器不是标准的,但是有一些严格的规范可以辅助确保最小化MDI和电缆之间不必要的相互作用。举例来说,图4提供了用于multi-Gig汽车以太网的H-MTD连接器示例,也可用于新兴的SerDes标准。
在信道测试中,我们需要查找错误,例如:
•阻抗失配
•信号失真或缺陷
•电缆之间的串扰
接收器测试
接收器负责理解通过链路发送的数据,然后将其传递给ECU或显示设备进行进一步处理。接收器的误码将导致来自摄像头、雷达和激光雷达等安全关键传感器的数据丢失或损坏。
名副其实的接收器功能变得越来越困难,特别是当通过暴露于多个同时噪声源的长信道发送时。为描述接收器的能力,必须测量存在多个噪声源时的误差水平,包括:
•窄带干扰
•大电流注入
•即时瞬态
•外来电缆束串扰
测量装置可以包括噪声源、放大器和耦合电路,这些会将精确级别的噪声导进有源SerDes链路。然后查询待测器件(DUT)的信号质量寄存器,以验证接收器是否能够在存在噪声的情况下正确解释信号。接收器测试的重点是对接收器施加压力,以确保其仍能保持误码率。
车内网络测试变得至关重要
根据MarketsandMarkets的数据,全球汽车摄像头以及集成雷达和摄像头市场规模预计将从2021年的61亿美元增长到2026年的101亿美元。
由于需要更多的摄像头和其他传感器来确保更高的安全性并推动自动驾驶,车内网络测试成为不可忽视的环节,只有确保互操作性以及满足其关键任务功能的性能标准才能更好地推动自动驾驶。



编辑推荐




最新资讯
-
(欧7、国七)天纳克低排放制动器
2025-04-29 08:32
-
塑料燃烧性能的测定(氧指数法)
2025-04-29 08:31
-
电子电工产品燃烧性能的测定(灼热丝法)
2025-04-29 08:29
-
塑料燃烧性能测试介绍
2025-04-29 08:28
-
打造极致充放电体验 中国新能源汽车充放电
2025-04-29 08:25
