




 广告
广告





















































新能源汽车远程遥控泊车上电设计
2021-11-08 21:45:45· 来源:电动学堂 作者:郑舒懿等

文章来源:上汽通用五菱汽车股份有限公司技术中心1引言目前市面上的大部分电动汽车接收到手机端发送的远程遥控泊车指令后,在上电认证时只经过整车控制器和车内
文章来源:上汽通用五菱汽车股份有限公司技术中心
1引言
目前市面上的大部分电动汽车接收到手机端发送的远程遥控泊车指令后,在上电认证时只经过整车控制器和车内一键式启动控制器(以下简称PEPS)的一次鉴权后就可以跳转到动力准备状态。仅有一次鉴权,上电的安全性比较低,且在上电前没有判断SOC值、充电线等因素,存在启动失败及安全隐患。
本文提出一种在远程遥控泊车上电过程中不同控制器之间采用双重鉴权及上电前对SOC值、充电线连接状态的判断的策略,使用户在使用手机远程遥控泊车上电时的安全性得到一定保障。
2现有技术分析
现有远程遥控泊车上电逻辑是由车载终端、整车控制器、手机APP、PEPS控制器及相关线束完成。
车载终端接收到手机APP发送的遥控泊车指令后,通过CAN网络发送给PEPS控制器,PEPS控制器接收到信号后通过内部逻辑判断使整车电源模式由OFF跳转到ON并与整车控制器进行防盗鉴权,通过鉴权后,整车控制器控制继电器闭合,整车进入动力准备状态
该技术目前的局限在于:
车载终端接收到远程遥控泊车信号以后,CAN信号传递的过程中,只有控制器与整车控制器之间一次防盗鉴权,安全性较低;
无上电前SOC值判断,若电量过低时进行远程遥控泊车,容易出现泊车进行时车辆因SOC过低而熄火无法启动;
无上电前整车防盗模式和充电线是否连接判断,导致进行远程遥控泊车时存在一定安全隐患。
3系统设计
3.1系统概述
本文介绍的远程遥控泊车上电逻辑涉及的主要有整车控制器、车载终端、智能进入系统控制器、手机APP四个部分。接收到远程信号后,智能进入系统控制器判断实际车况后与其他控制器进行双重鉴权,使远程遥控泊车上电过程更加安全可靠。
3.2系统架构设计
远程遥控泊车上电逻辑涉及的主要有整车控制器、车载终端、智能进入系统控制器、手机APP四个部分,具体框图如图1所示。
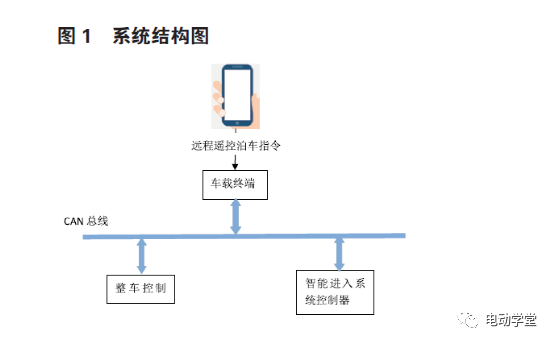
整车控制器,是整个汽车的核心控制部件,相当于汽车的大脑。它采集加速踏板信号、制动踏板信号及其他部件信号,并做出相应判断后,控制下层的各部件控制器的动作,驱动汽车正常行驶。作为汽车的指挥管理中心,整车控制器主要功能包括:驱动力矩控制、制动能量的优化控制、整车的能量管理、CAN网络的维护和管理、故障的诊断和处理、车辆状态监视等,它起着控制车辆运行的作用。
智能进入系统控制器,是核心控制单元。当接收到合法的远程遥控泊车上电请求时控制整车电源模式由OFF挡跳转到ON挡,支持LIN总线控制ESCL(电子转向柱锁)解闭锁。
车载终端,是接收手机APP远程信号的控制器,实现手机APP与车辆之间的信息显示与控制。
手机APP是用户实现与车辆进行远程信息交互并由此来远程控制车辆的一种途径。
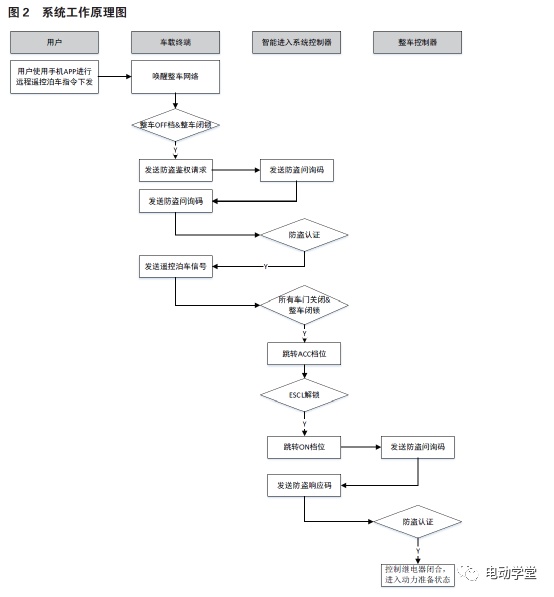
3.3系统工作原理
本策略中,整车使用智能进入系统控制器替换PEPS控制器与车身控制模块,由智能进入系统控制器控制整车上下电策略的执行。
1、车载终端接收到手机APP远程遥控泊车指令后,唤醒整车网络并判断整车上电条件,然后向智能进入系统控制器发送防盗鉴权请求,智能进入系统控制器发送防盗问询码给车载终端,车载终端回应防盗响应码。
2、鉴权认证通过后,车载终端将远程遥控泊车信号通过CAN网络发送给智能进入系统控制器,智能进入系统控制器判断整车上电条件符合后,整车电源模式跳转到ACC档位,且智能进入系统控制器进入遥控上电模式,同时ESCL解锁,整车电源模式跳转到ON档;
3、整车控制器检测到ON档信号后向智能进入控制器发送防盗询问码,智能进入系统控制器回应防盗响应码,鉴权请求认证通过后,整车控制器控制继电器闭合,整车进入动力准备状态(图2)。
4技术创新点
与市面上现有技术相比,本文涉及的逻辑方案有以下技术创新点:
1、车载终端与智能进入系统控制器之间增加防盗鉴权认证步骤,实现远程遥控泊车上电流程双重鉴权,提高远程遥控泊车上电逻辑的可靠性;
2、远程遥控泊车上电前增加整车SOC值判断;
3、远程遥控泊车上电前增加整车防盗模式及充电线连接判断。
5结束语
通过增加控制器之间的鉴权步骤及上电前对车辆点亮、充电线连接情况等车况的判断,使用户在使用远程遥控泊车功能时更有安全保障,提升用户的功能使用体验感。
- 下一篇:4680大圆柱电池研究更新
- 上一篇:锂离子电池热失控产生烟气成分研究综述



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
