




 广告
广告





















































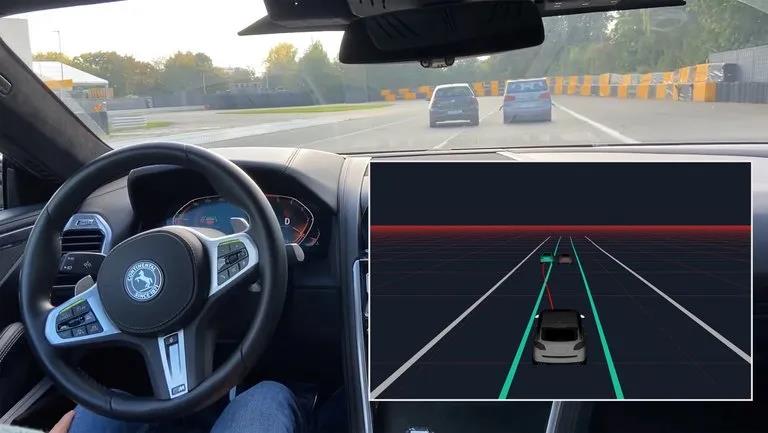
下一代“驾驶规划器”软件 自动并入高速公路
2021-11-11 15:03:55· 来源:大陆集团

科技公司大陆集团成功开发出一种突破性的高度自动驾驶技术解决方案:一款能够自动执行复杂驾驶操作的智能软件。该解决方案的特别之处在于其已接近批量生产阶段,
科技公司大陆集团成功开发出一种突破性的高度自动驾驶技术解决方案:一款能够自动执行复杂驾驶操作的智能软件。该解决方案的特别之处在于其已接近批量生产阶段,最早可在2024年投入使用。大陆集团以此向全世界宣告,自动驾驶既不是遥不可及的空想,也不是只有那些搭载特殊设备的高端车辆才能享受到的专属特权。从软件到所需的传感器系统,所有关键部件都由大陆集团自主开发。
下一代“驾驶规划器”软件自动并入高速公路
下一代“驾驶规划器”(Driving Planner)是一种创新的软件解决方案,可助力实现三级以上的高级别自动驾驶。这意味着车辆可以在无需驾驶员干预的情况下独立完成某些特定的驾驶任务。
大陆集团开发的这款软件是驾驶智能化的一个重大飞跃。“驾驶规划器”可基于巨量传感器数据计算出精确的决策变量,从而在高速公路上自动完成复杂的驾驶操作。该软件可提前数秒计算出交通状况,并得出车辆的最佳响应操作。
新解决方案的特别之处在于,可通过一种和谐,智能,紧耦合的方式,实现横纵向联合规划控制。目前可用的独立系统——如自适应巡航系统、变道辅助系统——分别独立地规划纵向和横向运动,例如自适应巡航系统用于规划纵向运动,变道辅助系统用于规划横向运动。大陆集团的“驾驶规划器”可在几秒钟内同时计算出纵向和横向运动,从而使得车辆可完成高度自动驾驶所需的复杂操作。

一个典型的例子是,在未来,当车辆通过加速车道驶入高速公路时,新系统将起到缓解驾驶员压力的作用。“驾驶规划器”将根据雷达和摄像头等传感器的探测数据对驾驶环境进行复杂的计算分析,并做出最佳决策。随后,其他软件模块会控制车辆执行该驾驶决策,车辆将向前加速,从侧面并入车流,然后根据交通流量和道路状况完成提速。
再举一个例子,本车在三车道高速公路的中间车道行驶,这时右车道发生交通堵塞,而左车道上的车速非常快。突然,一辆汽车猛然从右车道并入中间车道。在不到一秒时间内,“驾驶规划器”将从各种可能的选择中计算出最安全的驾驶操作,即先在当前车道刹车降速避免碰撞,随后加速向左并道,在左车道上调整好车速,并跟在另一辆车后恢复正常行驶。
“驾驶规划器”能够计算出高达130公里时速的驾驶操作。该软件系统的开发已经完成,有望在2024年上线使用。
下一代“驾驶规划器”软件自动并入高速公路
下一代“驾驶规划器”(Driving Planner)是一种创新的软件解决方案,可助力实现三级以上的高级别自动驾驶。这意味着车辆可以在无需驾驶员干预的情况下独立完成某些特定的驾驶任务。
大陆集团开发的这款软件是驾驶智能化的一个重大飞跃。“驾驶规划器”可基于巨量传感器数据计算出精确的决策变量,从而在高速公路上自动完成复杂的驾驶操作。该软件可提前数秒计算出交通状况,并得出车辆的最佳响应操作。
新解决方案的特别之处在于,可通过一种和谐,智能,紧耦合的方式,实现横纵向联合规划控制。目前可用的独立系统——如自适应巡航系统、变道辅助系统——分别独立地规划纵向和横向运动,例如自适应巡航系统用于规划纵向运动,变道辅助系统用于规划横向运动。大陆集团的“驾驶规划器”可在几秒钟内同时计算出纵向和横向运动,从而使得车辆可完成高度自动驾驶所需的复杂操作。
一个典型的例子是,在未来,当车辆通过加速车道驶入高速公路时,新系统将起到缓解驾驶员压力的作用。“驾驶规划器”将根据雷达和摄像头等传感器的探测数据对驾驶环境进行复杂的计算分析,并做出最佳决策。随后,其他软件模块会控制车辆执行该驾驶决策,车辆将向前加速,从侧面并入车流,然后根据交通流量和道路状况完成提速。
再举一个例子,本车在三车道高速公路的中间车道行驶,这时右车道发生交通堵塞,而左车道上的车速非常快。突然,一辆汽车猛然从右车道并入中间车道。在不到一秒时间内,“驾驶规划器”将从各种可能的选择中计算出最安全的驾驶操作,即先在当前车道刹车降速避免碰撞,随后加速向左并道,在左车道上调整好车速,并跟在另一辆车后恢复正常行驶。
“驾驶规划器”能够计算出高达130公里时速的驾驶操作。该软件系统的开发已经完成,有望在2024年上线使用。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
