




 广告
广告





















































【知乎圆桌】智能指数专题|自动驾驶系列问答四
2021-11-18 14:41:45· 来源:中国汽研汽车指数

问丰田自动驾驶撞伤残奥会运动员致退赛,道歉称「对自动驾驶过于自信」,如何看待目前自动驾驶技术的发展?首先,我们回顾一下丰田e-Palette这场事故的细节。基
问
丰田自动驾驶撞伤残奥会运动员致退赛,道歉称「对自动驾驶过于自信」,如何看待目前自动驾驶技术的发展?
首先,我们回顾一下丰田e-Palette这场事故的细节。
基于目前可公开获得的信息,e-Palette作为具备L4级自动驾驶功能的示范运行车辆,事故发生时应正处于自动驾驶状态,同时还配备了安全员监管。车辆在右转的过程中以1-2km/h的速度撞到了正在通过路口的北园新光,使其受伤。

丰田e-Palette
客观地说,1-2公里的时速(可能比我们走路还慢一半),遇到通过路口的行人,这样的场景对人类驾驶员来说绝对算不上是复杂、紧急的情况。但是,e-Palette瞄准L4级自动驾驶,同时装备有摄像头与激光雷达,且在东京奥运园区进行了大量测试,结果还是出现了失误。至少从目前来看,自动驾驶没有我们想象的那么靠谱,丰田章男本人也表态对自动驾驶过于自信。

以从业者的角度,我们也应该更深一步地思考此次事件。
作为自动驾驶的研究者,我们始终是以人类自己的眼光来看待自动驾驶的场景。我们始终认为,场景中的交通参与者越少见、数量越多、运动越复杂,这个场景就越“难”,因为它在人类的视角中看起来很难。
事实上,机器的“难点”往往不同于人类的“难点”。人类在认知方面的能力远远强于当前的人工智能系统,但运算效率早已远远被甩在后面(例如,绝大部分人的多位数乘除法能力都是被N年前的计算器碾压),这就意味着我们可能需要从不同视角来找到自动驾驶的“难点问题”,从而解决自动驾驶面临的长尾问题。
然而,实现这件事并不容易。
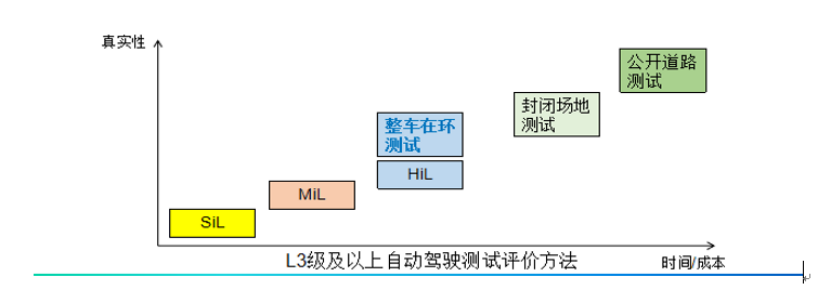
整车在环实验特点
自动驾驶的测试评价体系,尤其是测试场景的设计,目前主要以人类专家为主导。以系统功能为出发点的测评方法(如功能安全HARA分析、预期功能安全STPA分析)站在功能设计的角度进行场景构建和分析,这已经是结合人类认知与系统功能分析的比较好尝试。
即使如此,上述方法对于“危害“的定义和梳理也大多是基于人类对功能的认知,仍然具有很强的局限性;而且该工作的开展往往需要有充足经验的系统工程师(分析流程管理)、研发工程师(梳理零部件机理性能力不足)、测试工程师(场景梳理与缺陷识别)共同完成,协作成本较高。当前测试手段和效率也造成了很大局限性,仿真测试难以支撑感知的危害分析与测试,物理测试又难以保证足够的覆盖度,因此也就难以充分解决人类对机器的认知局限问题。
因此,可以预见在未来一段时间内,人类对机器的不准确判断(其中高估是主要问题)可能都会持续存在,进而造成自动驾驶测试甚至运营阶段的安全隐患。遗憾的是,通过人工接管甚至交通事故来对这部分的功能不足进行改进几乎难以避免。在预期功能安全的ISO标准里,也特意包含了“危害可接受度”的概念和“运行阶段的监测、验证和风险重新评估”过程。
作为自动驾驶从业者,我们能够做的就是在完善产品功能性能的前提下,尽可能通过技术、标准、政策手段将量产自动驾驶车辆可能的危害降至可被普遍接受的水平。例如,本次事故中,碰撞速度极低,又有安全员待命,事实上已经较好地控制了事故的危害,同时也可以通过对该事故的分析提高车辆应对类似场景的能力。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
