




 广告
广告





















































使用 DES 和 LES 的不可压缩和可压缩求解器研究通用侧视镜的内部噪声
2021-11-26 19:38:55· 来源:AutoAero

摘要外部湍流是汽车座舱内部噪声的重要来源。湍流冲击舱室的窗户,激发产生内部噪声的结构振动。同时,湍流产生的外部噪声也会引起车窗振动,产生内部噪声。安装
摘要
外部湍流是汽车座舱内部噪声的重要来源。湍流冲击舱室的窗户,激发产生内部噪声的结构振动。同时,湍流产生的外部噪声也会引起车窗振动,产生内部噪声。安装在车窗上游的侧视镜是诱发湍流的主要车身部件之一。在本文中,我们研究了由普通侧视镜引起的车内噪声。车内噪声在带有矩形玻璃窗的长方体腔中传播。采用先进的CFD方法计算外部流动和外部噪声:可压缩大涡模拟、可压缩分离涡模拟(DES)、不可压缩DES和与声波模型耦合的不可压缩DES。最后一种方法是分别模拟水动力和声压。在计算内部噪声时,将气流和噪声的压力波动施加在窗口上,而在流动模拟中忽略了窗口振动反馈对气流的反向影响。讨论了局部流动特性。高能表面压力出现在镜侧边缘的剪切层撞击窗口的区域,量化了水动力和声压对车内噪声的贡献。研究发现,声学成分在车内噪声产生中更有效,并且在高频时起主导作用。
1.介绍
车内噪声是汽车行业关注的问题,目的是为长期暴露在噪声中的驾驶员和乘客创造舒适的环境。然而,由气流引起的车内噪声并未得到有效控制。
侧视镜是汽车驾驶室内噪声的重要来源。反射镜产生的高能涡流可产生显著的外部噪声和强大的流体动力冲击。在道路试验中,对一辆车的外部气流和噪声引起的内部噪声进行了测量。同时还使用了经验统计能量分析(SEA)模型分析外部声压和水动力压力对内部噪声的影响。研究发现,外部声压非常重要,尽管在100 Hz至5000 Hz的频率范围内,外部声压比水动力压力低20dB至40dB。在Vanherpe等人的研究中,进行了可压缩流模拟,以分析由于反射镜引起的尾迹撞击而产生的外表面压力波动的频谱。在光谱中可以清楚地分辨出与水动力和声压相关的两个区域。对安装在通用车辆模型上的生产镜的内部噪声进行了实验和数值研究。在他们的研究中,根据频谱将外表面压力分解为水动力压力和声压,声压是车内噪音产生的主要原因。在模拟和实验中,进一步探索了装配在测试车上的测试镜的频谱。在大部分车窗的高频处,外部声压是主要的内部噪声源,但靠近后视镜的区域除外,该区域的水动力压力更有效。在Schell和Cotoni最近的一项研究中,预测了通用车中由气流引起的内部噪声。除了后视镜外,还提出了一种通用侧视(GSV)后视镜。他们在模拟和实验中研究了表面压力和外部远场噪声。由于尾流的撞击而产生的表面压力波动是主要的外部噪声源。从镜侧边缘撞击板,然后形成强大的脉动压力区。此外,使用不可压缩大涡模拟(I-LES)和不可压缩分离涡模拟(I-DES)对通用侧视镜进行了研究。使用Ffowcs Williams和Hawkings(FW-H)声学类比预测远场外部噪声。他们关于表面压力的结果与实验结果一致。
本研究旨在研究由GSV反射镜产生的涡流致内部噪声,将探讨噪声产生过程的基本机理。另一个目的是研究不同的计算流体动力学(CFD)和计算气动声学(CAA)方法预测车内噪声的性能。CFD方法包括可压缩大涡模拟(C-LES)、可压缩DES(C-DES)和不可压缩DES(I-DES)。CAA方法是I-DES和声波模型(AWM)的耦合方法。对于I-DES,将讨论网格拓扑的影响。此外,还将讨论噪声源、外部水动力和声压的贡献。将阐明在车内噪声预测中考虑外部压缩性的重要性。
2.结构
配置如图1所示,GSV后视镜组装在一块板上,反射镜和平板的尺寸根据实验的设置进行设计,而平板的前缘角被磨圆,以符合反射镜诱导的尾迹产生的球形声波的辐射。在板下放置一个空腔,由厚度为0.004m的玻璃制成的窗户设置在板和空腔之间的接口上。流动的表面压力波动刺激窗口振动,然后,振动会在腔体中产生内部噪音。外部和内部空气均假设为理想气体,分子量为28.97 kg/kmol,外部流动的自由流速度矢量为(39.89 0 0)m/s。自由流压力为101325kPa。自由流温度为300K。
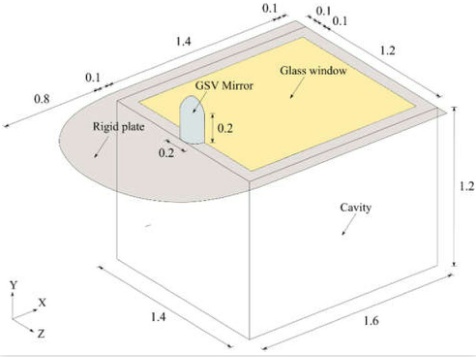
图1 GSV反射镜、玻璃窗和腔体组成的配置图,长度刻度单位为m
3.数值方法
3.1 气动声学方法
流动的连续性、动量和能量的控制方程在流体力学领域是众所周知的。因此,为了简洁起见,不介绍这些内容。由于本研究中的模拟是使用STAR-CCM软件进行的,请参考本软件用户指南中方程的详细信息。
采用C-LES、C-DES和I-DES等方法对流动进行了模拟。由于I-DES忽略了由于可压缩性引起的密度变化,因此在计算中无法解析声波。为了模拟这种方法的噪声,使用了AWM。
3.1.1 CFD方法的数值离散化
采用有限体积法离散连续、动量和能量的输运方程。分离流求解器用于求解离散化方程。分离流求解器采用半隐式压力连接方程法(SIMPLE)算法。对于可压缩流求解器,在更新压力和温度后,通过求解理想气体的状态方程获得密度。
采用混合二阶迎风有界中心格式离散单元表面的对流通量,二阶格式对内部和边界单元表面的扩散通量进行离散。梯度计算采用二阶混合高斯-LSQ方法,包括重建单元表面的场值、扩散通量的二次梯度、压力梯度以及湍流模型的应变和旋转速率。
采用二阶隐式方法离散时间导数,在时间推进过程中,采用了一种在预处理伪时间步上进行内迭代的双时间步方法。
3.1.2. 湍流模拟
在DES方法中,使用改进的延迟分离涡模拟(IDDES)模拟湍流。IDDES模型的系数采用软件中的默认值。当模拟中涉及压缩性时,k-ω模型启用压缩性校正。湍流耗散通过增加作为湍流马赫数函数的膨胀诱导耗散进行校正。
LES的湍流建模使用Smagorinsky模型。确定子网格比例(SGS)粘度的网格过滤器宽度的模型系数设置为Cs=0.1,SGS湍流动能的模型系数设置为Ct=3.5,K=0.41近壁处理采用Van Driest阻尼函数。
3.1.3. I-DES的声波模型
I-DES作为不可压缩流动求解器,只能求解流体动压,而不包括声压。然而,声压是造成车内噪声的一个重要因素。因此,需要一个声学解算器与I-DES耦合,以预测车内噪声。
基于声学微扰方程(APE)开发的AWM在STAR-CCM中实现。APE是通过对Navier-Stokes方程的线性化推导出来的。它解决了声波产生的压力和速度扰动。方程组左侧描述了扰动的声传播。声源位于右侧。由于目前应用的马赫数较低,平均流的对流在传播过程中被忽略。声源表示为压力波动。APE简化为AWM,如下所示:

式中,P′表示水动力压力波动,c表示声速,t表示时间。在耦合方法中,从I-DES获得的压力波动被输入AWM。
3.2. 结构振动和车内噪声的测量方法
玻璃窗和腔体构成一个结构声学系统。结构声学系统的频域控制方程如下:

其中,下标S和A表示与窗结构和空气相关的数量。外表面压力波动(包括流体动力和声学部分)来自CFD方法或耦合CFD/AWM方法。它作为强制边界条件施加在玻璃窗上。结构/声学耦合矩阵用CSA表示。结构声学方程通过自由场技术产生的Actran中实施的有限元法进行求解。
4.数字设置
4.1. 边界条件和解算器参数
计算域及其尺寸如图2所示。为了减小声波在远场中传播的入射角,在远场中构造了圆形边界。域的上游部分具有球形,以符合板的形状。反射镜和出口之间的距离足够大,以减少出口处涡流发出的人为噪音。在反射镜和板的表面上指定了防滑壁边界条件。在域边界的剩余部分,应用自由流边界条件。
隔离流解算器中速度和压力的欠松弛系数设置为0.6和0.3。湍流传输方程的欠松弛因子指定为0.6。每个时间步的最大内部迭代次数为20。根据对配置进行的初步数值试验,该数值足以使解收敛。窗被建模为二维曲面。窗口和空腔之间的边界设置为零位移和旋转。在腔体壁上施加镜面反射壁条件而不吸收反射声波。
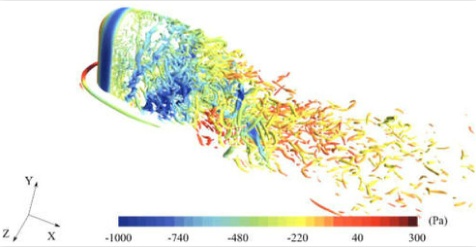
图2 计算域的示意图,标有长度刻度,单位是米。
4.2. 计算网格
该模型生成的非结构网格用于LES、C-DES和I-DES的流动模拟。此外,采用多面体网格方法生成非结构网格,并将其用于I-DES和AWM的耦合流-气动声学模拟。尽管网格生成方法不同,但两个网格的分辨率由相同的参数控制。表面单元的大小介于0.001m和0.01m。
镜像边缘附近的体积单元大小控制在0.001m以下。并且对流动尾迹所在区域的体积单元进行了细化。该区域从后视镜后表面开始,在1处结束。该区域在垂直于流向的方向上的宽度以10°的扩展角延伸。区域中的最大单元格大小设置为0.005m。网格的全局最大大小为0.05m。
基于我们之前的研究,网格增长率的范围设为1.05到1.1。上述网格分辨率已在使用较粗分辨率网格的初步模拟中进行了检查。y=0.1m的剖切面中的网格,如图3所示。网格使用7个级别进行细化。与第7级细化级别相对应的最小单元位于镜像边缘附近。流动尾迹存在的区域包含在第5细化级别细化的单元。板上方的大多数单元在第四级细化级别以上细化。
图4显示了z=0m剖切面中的网格,该剖切面是镜像几何体的对称平面。细化区域沿y轴方向以10°的扩展角扩展。这种细化使得剪切层和尾流中的流动结构具有良好的网格分辨率,在图5中y=0的剖切面中查看多面体网格,该网格中细化区域的分布与网格一致。然而,在多面体网格中观察到单元大小的平滑变化。这与网格不同,网格中的单元在每个细化级别的区域中具有统一的大小。切割后的网格包含2100万个单元、6200万个面和2100万个顶点。多面体网格有800万个单元、5300万个面和4200万个顶点。在模拟过程中,窗口被视为结构声学系统中的一个曲面,生成了一个二维结构网格。这些单元格的大小为0.0125m。空腔生成另一个结构化网格,单元格大小为0.025m,这些网格如图6所示。
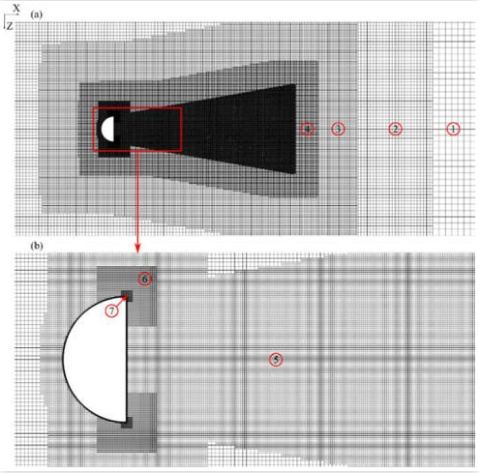
图3 y=0.1m的剖切面中的网格。除了边界层中的棱柱元素外,网格还细化为7个级别。红色圆圈中标记的数字表示局部优化级别,子图(a)中的红色矩形标记是子图(b)中放大的区域。
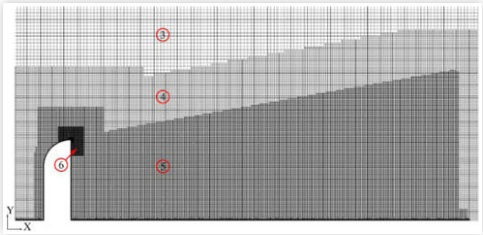
图4 z=0m剖切面中的网格。红色圆圈中的数字表示局部优化级别。请注意,细化级别7的单元格由于尺寸较小而无法清晰显示。
5.结果和讨论
CFD模拟在瑞典国家计算基础设施提供的集群上进行并行计算。
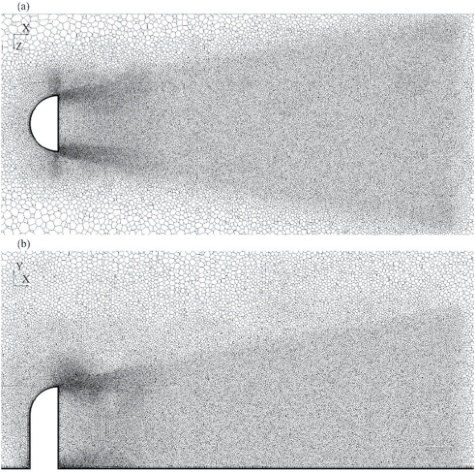
图5 (a)y=0的剖切面中的多面体网格。1m和(b)z=0m,为耦合I-DES/APE生成网格。
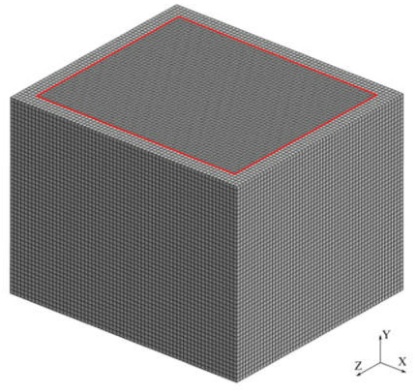
图6 为窗口和空腔生成的结构化网格,窗口边界用红线标记。
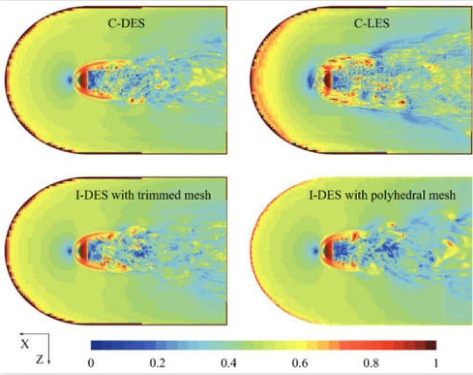
图7 不同CFD方法消耗的每个时间步长的运行时间。
图8 使用不同的CFD方法计算近壁细胞的y+。
通过对48个核的并行计算,评价了不同CFD方法的性能。图7显示了两种方法之间每个时间步所用时间的比较。C-LES占用的时间最短。对于相同的网格,LES比DES消耗更少的计算资源,因为它求解的方程更少。I-DES的运行时间略小于C-DES的运行时间。这表明,模拟中涉及的压缩性对计算速度的影响有限。与使用网格的I-DES相比,使用多面体网格的I-DES需要更多的计算资源。原因是前一个网格包含的顶点远多于后一个网格,尽管这两个网格是使用相同的网格密度设置生成的。当AWM用于重建外部声波时,经过的时间与不带AWM的I-DES相比增加1.2倍,原因是AWM的声学模拟需要额外的计算资源。
物体的瞬时轮廓图8显示了近壁网格的y+。所有不同网格的CFD方法均达到除沿板材边缘的狭窄区域外,大部分表面的y+小于1。由于板边缘的边界条件从自由流边界条件变为壁面边界条件,因此高速度梯度会导致较大的值。小∆y+表明边界层在模拟中得到了很好的解决。C-DES和I-DES的结果是一致的,但在实验中观察到更宽的尾流区域是C-LES。此外,与DES方法相比,使用C-LES解析的反射镜上游和剪切层附近的轮廓波动更大。
为了识别反射镜诱导的旋涡,图9显示了用C-DES求解的Q准则的瞬时等值面为。在尾流中观察漩涡,可以看到马蹄形涡流在镜子的上游形成。由于从其他CFD方法和网格中获得的流动结构与C-DES相似,因此未对其进行说明。此后,在模拟持续时间为0.2s的情况下,计算流量的统计特征。在放置在镜面上的监视器上计算系数。监视器的规格遵循Höld等人和Siegert等人的实验。为了简洁起见,本文选择了四个监视器并对其进行了讨论,尽管我们已经计算了所有监视器的系数。所选监控器的位置如图10所示。所选监视器称为M5、M15、M25和M34。前三个监视器位于后视镜正面,最后一个监视器位于后视镜背面。表1给出了监视器位置的坐标。
图9 使用C-DES模拟Q在处的等值面快照。
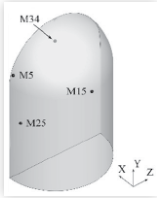
图10 后视镜上监视器的图示。监视器按照实验中的顺序编号[8,9]。监视器M34位于后视镜的背面。
表1 所选监控器的坐标
表2 选定监测器的时间平均压力系数Cp

表2中比较了不同CFD方法给出的以及文献中报告的〈Cp〉值。与实验数据相比,DES方法和I-LES在镜边附近M5处给出了更大的系数,而C-LES提供了更小的系数。如图8所示,较低的值与LES比DES在壁面附近呈现更多波动的现象有关。在驻点M15处的数值和实验结果是一致的。在M25处所有数值方法都低估了系数。该监视器位置接近最小剪应力张量。目前使用切割体网格或多面体网格的I-DES方法高估了M34处的系数。这种效应与可压缩性(与C-DES相比)和边界层中解决的波动(与C-LES相比)有关。
压力波动的均方根(rms)值,显示在图11中。DES方法得到的轮廓相似。这表明压缩性和单元拓扑结构的影响并不明显。然而,用C-LES方法求解的尾迹区域在翼展方向上比DES方法更宽。这一行为与表1所示的现象一致。因此,C-LES解决了边界层中更多的压力波动。由于计算均方根值时考虑的模拟持续时间有限(0.2秒),等高线是不对称的。
内部噪音的压力由位于腔体角落和中心的麦克风收集。麦克风位置如图12所示。腔中有9个麦克风。麦克风1设置在中心。其余话筒分布在角落。为了简洁起见,在随后的分析中选择1和4。

图11 使用不同的CfD方法计算压力波动的标准化均方根值。

图12 话筒位于腔体内部,话筒编号由圆圈。
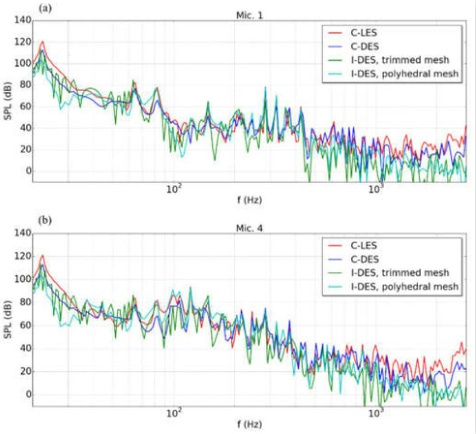
图13 使用不同的CfD方法计算(a)话筒1和(b)话筒4处的内部噪音频谱。
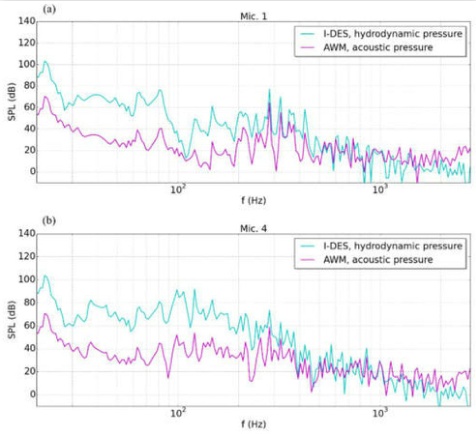
图14 话筒1(a)和话筒4(b)处内部噪声的流体动力和声学部分的频谱。
图13显示了根据不同CFD方法和网格的表面压力波动预测的声压级(SPL)。考虑到需要6个元素才能很好地解析波,当前腔体网格可解析的最大频率为2267 Hz。这表明高于最大频率的结果不准确。因此,图中频率范围的上限设置为3000 Hz。所有CFD方法在低于1000Hz的低频下给出了可比的量级,而在该频率以上,可压缩流求解器(C-LES和C-DES)给出的量级比I-DES更大。在I-DES中,未求解声压,因此由声压引起的内部噪声不包括在预测中。此外,通过I-DES获得的由外部水动力压力引起的内部噪声在切割体网格和多面体网格之间是一致的。原因是,一旦网格分辨率细化到足以解析流动结构,单元拓扑在水动力压力模拟中的作用有限。此外,用C-LES预测的振级在高频时大于C-DES,如图13所示。根据图8和图11,C-LES解决了边界层和冲击涡中更多的小尺度波动。波动形成高频噪声源。
图14中绘制了基于多面体网格耦合I-DES和AWM解计算的内部噪声谱。将车内噪声分解为两部分:一部分由外部水动力压力波动产生,另一部分由外部声压波动产生。水动力部分采用仅包括外部水动力压力的I-DES解进行预测。基于AWM解对声学部分进行预测。在低频时,水动力部分的振幅大于声学部分的振幅。对于1000Hz以上的频率,声学部分超过水动力部分。这一观察结果表明,外部声压是产生高频内部噪声的主要因素。可压缩流求解器(C-LES和C-DES)用于获得可压缩压力,包括流体动压和声压,而不可压缩流求解器(I-DES)仅给出流体动压。因此,可压缩流解算器可以预测总的内部噪声。不可压缩流解算器提供流体动力学内部噪声。
如图13所示,总的车内噪声在1000Hz以上没有下降趋势,通过应用AWM基于不可压缩流解决方案重建声压,发现这种不下降趋势是由于内部声学噪声造成的,这种噪声占主导地位,在高频时不会下降,如图14所示。虽然使用不同的CFD和CAA方法来模拟气流和噪声,但它们预测的总内部噪声趋势相似。这一现象与Hartmann等人报告的实验结果不同,Hartmann等人观察到了下降趋势。在他们的实验中,研究了装配在带座舱的通用车辆模型上的真实镜子。通过使用扬声器产生外部声激励,他们还证明了声压在内部噪声产生中起着重要作用。此外,发现放大后的后视镜会产生更大的内部噪音,即使该后视镜产生的外部压力与高于250 Hz的基准后视镜几乎相同。基于这一效应,他们得出结论,声压是导致车内噪声发生显著变化的主要原因。
放大镜和基准镜的比较揭示了另一个事实,即外部声压大小敏感地取决于镜的几何形状和尺寸。因此,可以理解的是,与Hartmann等人的真实镜子相比,本研究中的普通镜子在1000 Hz以上会产生不同的内部噪声谱。尽管如此,有趣的未来工作将是基于相同的数值和实验方法在普通反射镜和哈特曼真实反射镜之间进行交叉比较,并探索反射镜几何形状对内部噪声产生的影响。如图13所示,流体动力车内噪声与100Hz至1000Hz之间的车内总噪声相当。根据图14中观察到的结果,可以解释这种现象。低于400 Hz时,水动力车内噪声比车内噪声大约20-40 dB。因此,与总的内部噪声(水动力噪声和声学噪声之和)相比,内部声学噪声可以忽略不计。在400至1000 Hz的频率范围内,图13显示流体动力噪声的量级略低于总噪声量级。由于SPL定义中使用了对数刻度,因此添加与400至1000 Hz之间的流体动力噪声具有类似量级的声噪声(见图14)不会导致总噪声的显著量级增加。
6. 结论
本文用数值方法研究了长方体腔中的内部噪声。车内噪音是由车窗振动产生的,车窗振动由车外气流和通用侧视镜的气流诱导噪音激发。采用先进的CFD和CAA方法(如C-LES、C-DES、I-DES和I-DES)结合AWM对外部流动和噪声进行了模拟。耦合方法分别模拟外部水动力和声压。与DES方法相比,C-LES方法解决了更多的边界层压力波动。结果是,在高频下,用C-LES预测的车内噪声大于C-DES。结果表明,用C-LES方法得到的尾迹区的展向宽度比DES方法得到的更宽。通过比较修剪网格和多面体网格的I-DES结果,发现在网格分辨率得到充分细化的情况下,单元拓扑对水动力压力解的影响有限。在低频范围内,外部水动力压力是车内噪声的主要组成部分,而在1000Hz以上,外部声压起主导作用。因此,在CFD模拟中应考虑压缩性,以便进一步预测车内噪声。但是,如果声学解算器与其耦合以恢复声波模拟,则不可压缩解算器也可以有效。
文献来源:Yao, H., Davidson, L., and Chroneer, Z., “Investigation of Interior Noise from Generic Side-View Mirror Using Incompressible and Compressible Solvers of DES and LES,” SAE Technical Paper 2018-01-0735, 2018, doi:10.4271/2018-01-0735.
- 下一篇:汽车轮胎气密性试验方法
- 上一篇:技术 | 奔腾T77驾乘性能技术解析报告



编辑推荐




最新资讯
-
UL 9540A-2025新版解析:储能安全标准全面
2025-04-01 21:04
-
中国汽研与远程新能源商用车集团共建安全创
2025-04-01 21:02
-
中汽研科技CAN芯片互操作性测试能力
2025-04-01 20:57
-
中汽中心与比亚迪集团签署战略合作协议
2025-04-01 20:56
-
欧盟:通用数据保护法GDPR的认证
2025-04-01 20:53
