




 广告
广告





















































自动驾驶中的“冗余”
2021-11-27 19:51:42· 来源:自动驾驶攻城狮

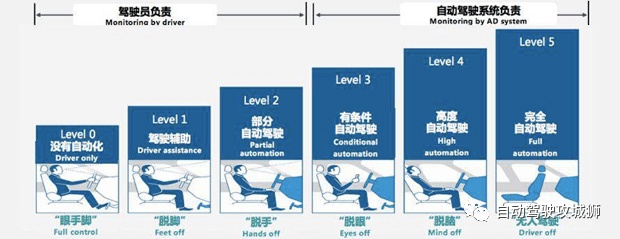
为什么需要冗余?-起源于驾驶责任的划分-L2及以下电子系统仅提供辅助功能,驾驶主体在驾驶员,当电子系统失效驾驶员可以通过机械系统直接操控来接管车辆。-L3及
为什么需要冗余?
-起源于驾驶责任的划分
-L2及以下电子系统仅提供辅助功能,驾驶主体在驾驶员,当电子系统失效驾驶员可以通过机械系统直接操控来接管车辆。
-L3及以上,自动驾驶系统负责,尤其是车端无人的情况下,也只能有自动驾驶系统负责,此时如果电子系统A失效,车辆将失控(无人接管),因此诞生了引入电子系统B的需求,即冗余备份。
(From Bosch)
冗余的范围?
-控制器冗余(大脑)
-感知定位冗余(环境监控)
-执行器冗余(制动、转向)
-通讯冗余(控制信息传递)
-电源冗余(支撑失效降级)

(From Bosch)
常用冗余策略?
-控制器冗余(大脑)
主控制器ADCU+备份控制器RCU,架构如下,双ECU相互监控,当主控制器发生故障,RCU进行接管控制。
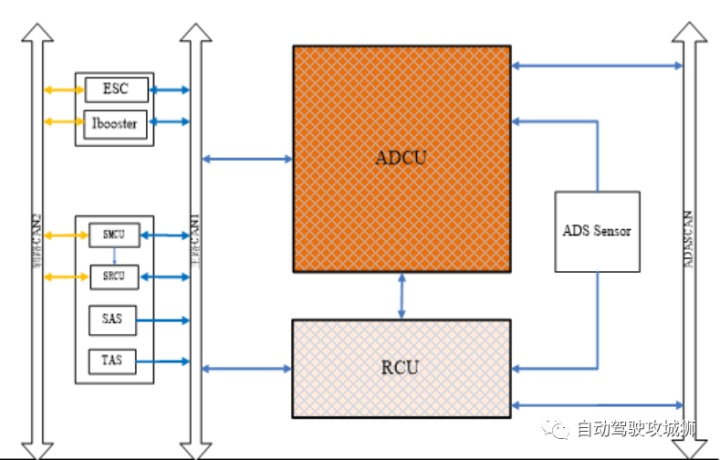
-感知定位冗余(环境监控)
ADS Sensor的冗余,通常是采用多种传感器的备份来实现,Radar/Camera双重覆盖,鲁棒性大大提升,定位层面也可以采用GNSS定位+感知环境重构的定位冗余。

-执行器冗余(制动、转向)
制动冗余,最经典的莫过于ESP+Ibooster方案了,如上面架构图所示,二者同时接受执行指令,一方失效另一方可补充制动,基本可以实现全速域的全制动冗余,目前Bosch还推出了最新的IPB+RBU的制动冗余方案。

两套电机,两套电源以及两套绕组的双EPS转向冗余,相当于完全独立的两套EPS硬件,相互独立,相互备份,整体成本较高,目前使用较少,有些OEM尝试采用四轮差速控制来实现转向效果,但实际应用也较少。

-通讯冗余(控制信息传递)和电源冗余(支撑失效降级)相对比较容易理解,通过架构设计的多链路通讯和供电设计即可满足。
- 下一篇:广汽-非屏蔽高压快充线对电动汽车EMC的影响
- 上一篇:电驱动总成整车经济性试验方法



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
