




 广告
广告





















































陆晓科:低速无人驾驶车辆试验鉴定方法浅析
2021-12-08 17:33:42· 来源:ITS智能交通

在由深圳市智能交通行业协会牵头低速无人车领域超过57家单位和112位专家的共同编制而成的《低速无人车城市商业运营安全管理规范》团体标准发布会上,公安部第一
在由深圳市智能交通行业协会牵头低速无人车领域超过57家单位和112位专家的共同编制而成的《低速无人车城市商业运营安全管理规范》团体标准发布会上,公安部第一研究所国家安全防范报警系统产品质量检验检测中心(北京)实体防护及警用装备检测部副主任陆晓科以《低速无人驾驶车辆试验鉴定方法浅析》为主题进行交流分享。
陆晓科认为,低速无人驾驶车辆与传统机动车辆相比,具备应用范围广、高效和维护费用低、机动灵活性强的特点;利用其AI 优势建立全方位的信息化作业模式,不仅能够有效地保障周边人身安全,还可以提高专用工作执行效力。
以下是ITS智能交通小编整理的演讲实录,内容略有删减,(未经本人核实)。

公安部第一研究所国家安全防范报警系统产品质量检验检测中心(北京)实体防护及警用装备检测部副主任陆晓科
陆晓科:很荣幸向各位领导和嘉宾汇报一下我们对这个标准体系里试验方法的来龙去脉。我汇报的内容有5部分:
第一章 低速无人驾驶车辆试验设计
低速无人驾驶属于新开发的系统,需要完成科研试验到质检试验、定型试验的跨越,这个过程中我们就需要进行试验设计,同时各个研究单位要不断推出新的产品、模型、算法,使得它的性能不断地提升,这样需要搭建一个比较固定的低速无人车检验方法。有了一整套对低速无人车的检定方法,国家才能对各个产品进行准确的判定,然后进行产品一致性的控制要求,从而监视产品的质量,区分产品各个运行当事人的相关责任。
传统的新产品的试验设计方法有以下几个流程:一是全面深入地了解被试对象,二是充分了解试验要求。低速无人车不仅仅是最后一公里无人行驶,而且它已经扩大了一些范围,目前已深入到学校、园区、景区,以及非公开道路。
无人车的术语定义在该团标的3.1,低速无人车应该具备L3、L4自主等级。
在标准的第二部分,第五、第六、第八、第十章列出了很多的试验项目,这些试验项目怎么让它落地,我们在第3条又研究了相关的汽车以及自主等级的标准体系,然后对试验条件进行了细致的核算,最后才明确了试验目的,确定了试验的内容,理清了实验设备。最后厘定了试验方法。
以一个安防巡逻车为例,它的安全运行试验项目有第一部分这么多的要求,第二部分是自主等级的要求,第三部分是专用性能,这是一个低速无人车典型的实验框架。
第二章,以汽车试验为基础
因为汽车的试验历史已经近百年了,它建立了一个非常稳定的试验体系,目前对于机动车的管理已经很成熟了,汽车试验分为安全性试验、质量检查试验、新产品定型试验以及研究性试验和整车性能试验。安全性试验是车辆高速正面碰撞,对低速无人车来说,替代这部分内容的是无人车最危险的工况,同时还有零部件试验,包括电池或者是雷达。同时汽车有它的试验场,对低速无人车来说,这部分对应的内容就是试验场景,高速汽车有风洞的试验,对低速无人车没有这部分内容。
完整的汽车试验的构造,这是一个客车的底盘,针对的试验项目是右边这部分的试验内容,这个试验项目就有4到5页,中国汽车的准入模仿的是欧洲模式,通过申请、产品检验、技术审核、公告,最后在社会发布。低速无人车目前是尽量促成它快速定型。在完成检测、定型以后,作为汽车可以依据相关的标准进行管理。
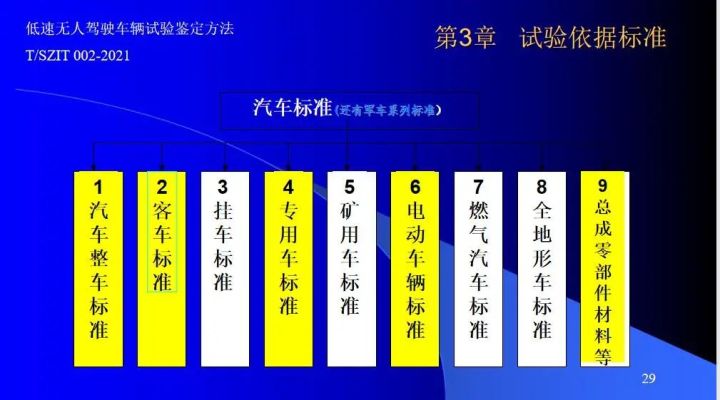
第三章,国内外试验鉴定标准
汽车的强制性检验标准体系为我们所采纳,其中为首的是GB4785,还有外围的标准,我们都进行了借鉴。(见PPT)这是汽车的标准体系,不算新兴的自主等级标准体系,不算国标,一共是9大类,黄色的5部分都为这次的标准体系所采纳。
低速无人车的适用范围以及实验方法目前国内外尚属空白,我们在《汽车驾驶自动化分级》基础上,借鉴了ISO22737标准。
低速无人车确认替代高速机动车的正面碰撞的威胁,实验鉴定的核心是它的危险工况,国内外公认低速车的危险目标是自行车和行人以及电动自行车。我们把发生危险工况分成两部分,包括有遮挡和无遮挡。
这次标准制定过程中,我们大量采用了机器人的试验方法,定位精度有的达到毫秒级。目前从机器人的性能测试方法、定位稳定度,有一整套的方法,所以这次都借鉴过来了。
第四章,低速无人驾驶车辆试验内容
低速无人驾驶车辆实验的目的是为了最终促成无人车的产品快速完成科研产品到定型产品的跨越,促成技术探索到业务运行的跨越。完成这些试验需要精密的筹划。具体落到这次的标准体系上,还是以第六部分的专用车为主,也就是安防巡逻车,这是模仿强检体系7258为首的试验方法。
沿用汽车的试验方法,比如可以进行倾翻的试验,类似于强检的所有检测项目,低速无人车的试验方法一律从严。比如说防雨的程度,低速无人车应该至少耐小雨或中雨,这次的标准写的是客车的标准,六年必须进行淋雨试验,其中底部还有雨的反积水试验,也就是说下雨天跑起来,雨的反渗也要受到检验。安全运行要求比较严。
同时无人自主L3、L4的验证方法是按照这上面的这些标准来运行的。
这部分试验的方法,在标准的第九部分。其中作为行人,特别是儿童是最危险的,他的行为不确定,怎么验证儿童以横向或者45度,甚至有遮挡的情况下,验证这些风险在附录C4.1有明确的规定,其中有测试设备,以及样车的参数、无人车的参数、行人的参数,行人的行走速度有快和慢。还有启动距离、环境参数,判定的准则,慢速是要跨越危险工况,如果快速的话,距离危险的目标,它需要停下来。
危险的状况还有自行车,对中国来说电动自行车更加危险,这部分的采样还有待进一步深入。危险的工况还有转弯状态、行人的突然变化,同时我们可以看到,转弯工况和汽车的试验场,低速无人车的检验,它的场地比较小。还有人员自主行走能力的检验,比如说前面突然拥堵了,无人车怎么来行进。我们可以比较一下高速机动车的碰撞实验,我们上述的构建已经把这个最危险的工况来替代了,整个低速无人车的检验节奏就是这么搭建的,附加第三部分是专用功能,比如说对于警用巡逻车来说,下雨天也需要巡逻,它需要具备一定的涉水能力,这是涉水实验的具体要求。完成整个试验结构之后,在本标准的第九部分的第12条强调了检测认证,也就是说低速无人车出厂的时候应该展开车辆检验以及认证工作,应该取得国家安全防范认证中心颁发的认证证书,本标准的第二部分也有类似的规定。
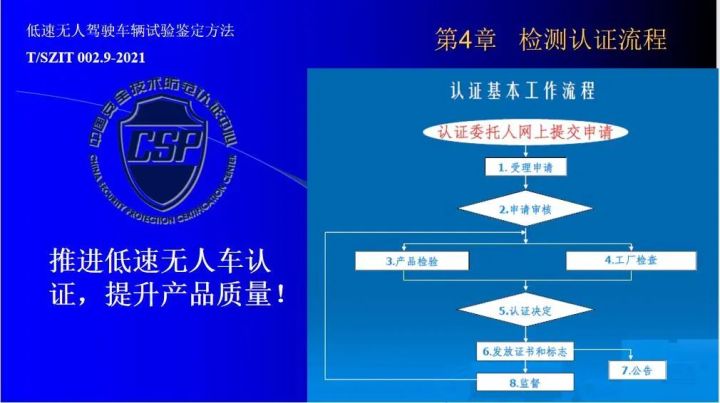
国内模仿欧盟的认证体系,它的认证流程首先是提出申请,然后审核,工厂检查、产品检查,最后进行认证。
第五章,自主试验鉴定方法刍议
无人车和传统的车有很多的区别,无人车的自主能力非常强,在一定环境中,它的鲁棒性、确定性要极其强,无人车的检验方法实际上是模仿美军的一些无人系统的历年来搭建起来的,它把试验验证往前移,定型之前要提前一段进行验证。它验证的是技术工况,以里程碑的成功替代传统的定性的试验方法,这里面有验证的方法,也有待进一步深化,欢迎各位领导、专家进行指正。
未来无人系统已经进入不断增值的状态,人工智能对社会更加重要,希望不管是检测技术还是这套标准,对无人车的市场进行进一步的推动。也欢迎各位到公安部检测中心进行交流。



编辑推荐




最新资讯
-
标准介绍丨ASAM ARTI 运行实时接口
2025-04-11 10:29
-
自动驾驶中基于深度学习的雷达与视觉融合用
2025-04-11 10:25
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
-
基于不同控制算法的半主动悬架仿真研究
2025-04-11 10:20
-
不允许起火爆炸,GB 38031《电动汽车用动力
2025-04-11 10:15
