




 广告
广告





















































浅谈汽车主动安全系统中的传感器
2021-12-13 19:55:29· 来源:广汽研究院集成安全技术部

近年来,伴随着汽车智能化的快速发展,主动安全技术在车辆上的应用越来越普遍,与被动安全技术一起,成为保护道路上人们生命安全的重要手段。但与被动安全不同的
近年来,伴随着汽车智能化的快速发展,主动安全技术在车辆上的应用越来越普遍,与被动安全技术一起,成为保护道路上人们生命安全的重要手段。但与被动安全不同的是,主动安全技术需要依靠车辆上的各种传感器,来探测获取车辆周围的各种信息,在碰撞前对车辆和驾驶员进行干预或提醒,从而避免交通事故的发生或减轻交通事故损伤的程度。
今天,我们就来聊聊车辆主动安全技术相关的传感器:摄像头、毫米波雷达和激光雷达。
01、摄像头
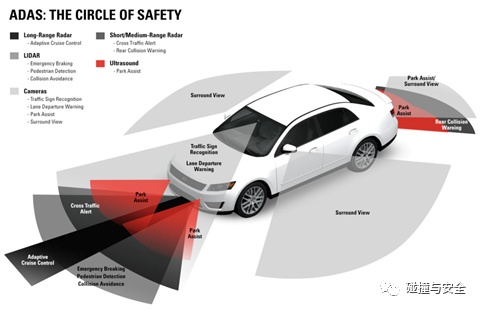
摄像头是我们比较常见的一种传感器,它最大的优点就是可以直接输出车辆周边环境的图像信息,便于主动安全相关系统直观地从图像中识别物体的类别,并从中提取大量信息,因此摄像头广泛用于识别车外的车道线、限速交通标志、车辆及行人等,同时,车内的疲劳检测系统也通过摄像头识别驾驶员的疲劳状态,以保证驾驶员的驾驶安全。

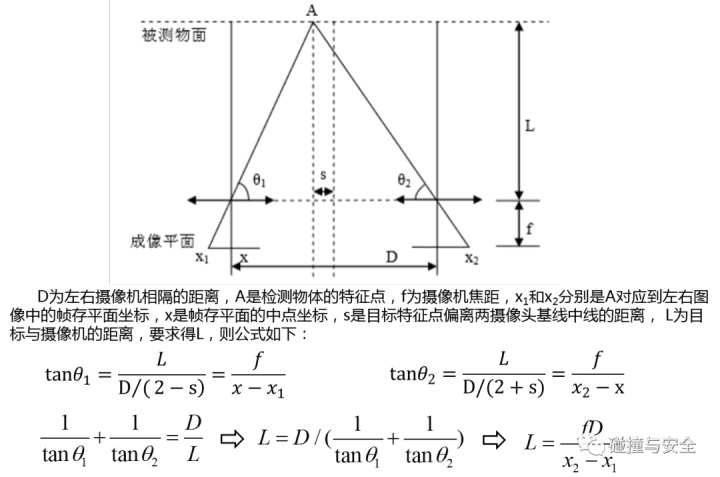
单个摄像头组成的识别系统虽然能够识别物体类别,但只能获取到二维的信息,而由两个摄像头组成的双目摄像头识别系统,就可以通过左右摄像头拍摄的两张图像,通过计算得到目标的空间位置信息,其主要原理如下图所示。
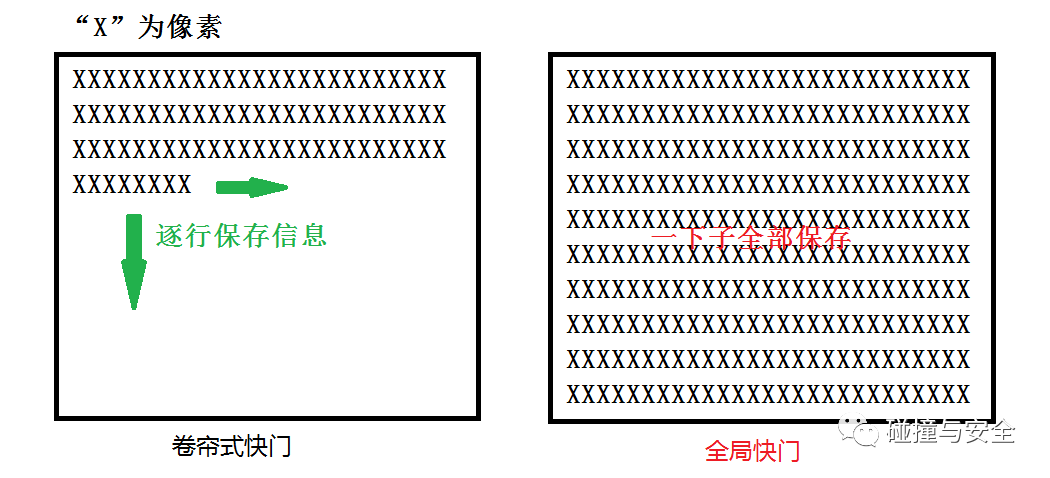
另外,不同于普通摄像头采用机械快门或卷帘式快门,车载摄像头一般都使用全局快门技术(Global shutter)。普通摄像头所采用的机械快门或卷帘式快门,是从上往下沿一定顺序逐行逐列对图像的像素进行处理和曝光,在拍摄快速移动的物体时会产生明显的拖影现象,而全局快门则是对图像的所有像素整体进行处理和曝光,可避免拖影现象的产生,保证图像的真实性。

但是,在雾天、雨天等能见度不佳或光照较差的条件下,摄像头很容易变成“瞎子”,其功能大打折扣,这也是摄像头明显的缺点。
02、毫米波雷达
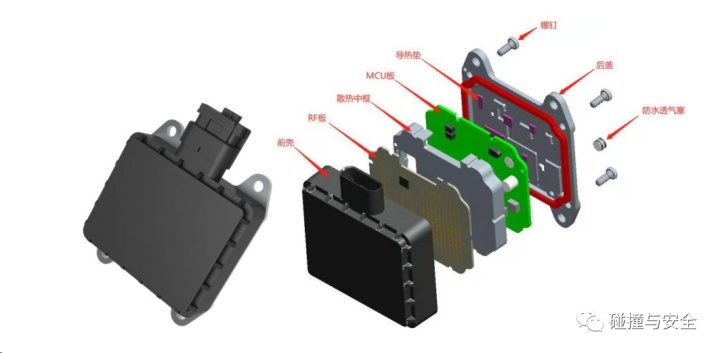
毫米波雷达通过对外发射无线电波,并使用天线接收目标反射的无线电波,来测量目标的距离、角度和速度。因为车载雷达的频率一般为24GHz和77GHz,根据波长=光速/频率可知,其波长为毫米级(严格来说,24GHz的波长属于厘米级),所以称其为毫米波雷达,也正是得益于较短的波长,毫米波雷达的接收天线体积可以做得非常小,有利于安装在车内。
根据可探测距离的不同,毫米波雷达主要分为SRR(短距离雷达,可探测距离<50米)、MRR(中距离雷达,可探测距离接近100米)和LRR(长距离雷达,可探测距离200~300米)。不同探测距离的毫米波雷达应用在不同的场景中,如LRR一般用于自适应巡航、自动紧急制动等需要探测远距离的系统,SRR则一般用于后方车辆穿越预警、后侧碰撞预警等探测近距离的系统。

毫米波雷达最大的优点是可以使用多普勒效应直接测量得到目标的速度,被广泛用于自适应巡航的跟车功能中。另外,由于毫米波雷达对非金属物质具有较强的穿透性,在雨、雾和沙尘等恶劣环境下都能正常工作,可实现全天候工作,也可以隐藏安装在车辆保险杠内部,不影响车辆外造型。
但是,毫米波雷达的缺点在于其不能探测到目标的高度信息,对物体的识别能力和对场景的还原能力较差。
03、激光雷达
激光雷达的全称为Light Detection And Ranging,通过主动向外界发射激光束,然后接收目标反射的激光,来测量目标的距离。我们常见的激光雷达是安装在车顶上的可360°旋转的机械式激光雷达,其里面安装有竖直排列的激光发射器,可向外界同时发射出不同数量的激光束,如常见的64线、128线激光雷达,即可同时向外界发射64束或128束激光,由于这些激光束呈竖直不均匀排列,所以能够便捷地探测到目标的高度信息。

单一激光束反射到激光雷达的接收器上,会形成一个点的信号,该信号包括了该点在激光雷达坐标系里的x、y、z坐标以及反射强度信息,多个竖直排列的激光束经过360°旋转后,就能形成了很多点,被称为点云,通过算法对点云进行处理,就能重建出周围的环境,实现精确的探测。

机械式激光雷达由于要进行360°旋转运动,其耐用性难以达到车规级要求,同时安装在车顶也影响了车辆的造型及性能,所以不需要进行360°旋转运动的纯固态激光雷达和混合固态激光雷达成为了新的发展方向。

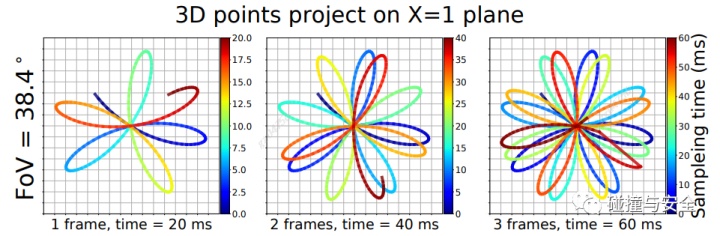
纯固态激光雷达无运动机构,主要分为OPA光学相控阵和Flash闪光两种,OPA光学相控阵激光雷达主要利用相位差控制光波的干涉,实现激光转向而达到往复扫描效果。而Flash闪光激光雷达则是在短时间内发射出一大片覆盖探测区域的激光,通过接收反射激光来探测信息。而混合固态激光雷达则在内部加入了微振镜、转镜和棱镜等机构,通过以上机构的微小运动改变激光的发射方向,实现激光对外界的扫描。如大疆的Livox激光雷达就使用了双棱镜机构,并采用非重复采样的策略,将激光束扫描的点投影到一个平面上,就形成了菊花状,又称为“菊花云”。
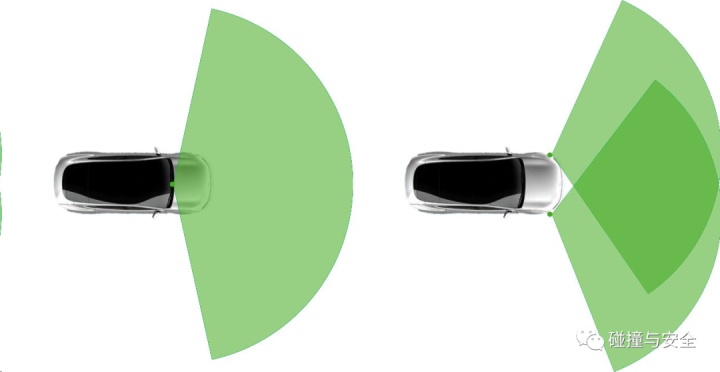
纯固态和混合固态的激光雷达只能面向一个方向进行扫描探测,其面积往往无法满足要求,所以一般会在车上布置多个激光雷达,以增大扫描面积,保证探测的精度。
激光雷达具有探测精度高,对环境重建后也能使用深度学习等算法识别出周围物体的类别等优点,但是由于空气中的雨雾和灰尘都会对激光进行反射,激光雷达难以做到全天候感知,其成本也远高于毫米波雷达和摄像头。
04、结语
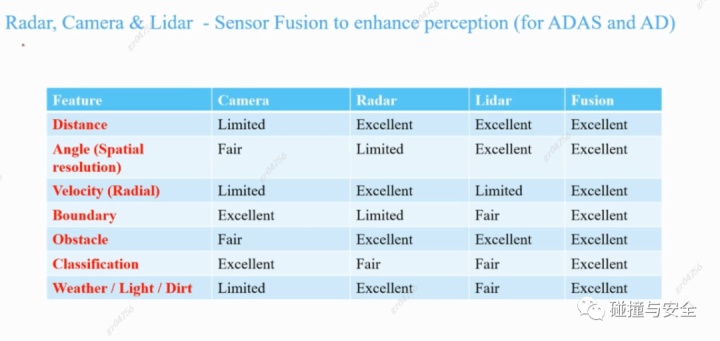
以上3种传感器各有优缺点,目前车辆可通过搭载多种传感器,并通过传感器信息融合技术,达到感知信息的冗余,确保决策的正确性,如今年发布的小鹏P5、极狐阿尔法S等车型,都同时搭载了激光雷达、毫米波雷达和摄像头等多种传感器。当然,也可以通过后期的算法来弥补某一传感器的缺点,达到使用一种传感器就能满足车辆感知需求的效果,如特斯拉就宣布放弃使用激光雷达和毫米波雷达,只使用摄像头走纯视觉技术路线。
总的来说,不同的车企可能会选择不同的技术路线,但最终目的都是为了让汽车更加智能化,让汽车主动安全变得更可靠、更强有力。实现道路交通零伤亡目标,我们永远在路上!
文章:黄宏滔
编辑:金玮
广汽研究院集成安全技术部



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
