




 广告
广告





















































汽车转向抖动问题的改进方法
2022-01-05 09:07:46· 来源:时代汽车

摘要:本文根据汽车加速测试发现汽车转向某转数下存在抖动现象,经过路径径查找分析,快速找出由于发动机 Z 向到方向盘的响应传递路径存在问题,并找出问题根源
摘 要:本文根据汽车加速测试发现汽车转向某转数下存在抖动现象,经过路径径查找分析,快速找出由于发动机 Z 向到方向盘的响应传递路径存在问题,并找出问题根源。基于仿真与试验对标后模型进行问题改进,最终转向抖动问题得到明显改善。
关键词:方向盘抖动 TPA 对标优化
1 引言
汽车转向系统的振动的主要表现形式为方向盘的振动,是影响整车 NVH 性能的重要因素之一。转向系统的振动通过方向盘直接被驾驶员所感知,长时间处于抖动状态,驾驶员会产生驾驶疲劳,烦躁,严重会引起交通事故。因此,对汽车转向抖动问题的研究具有极其重要的实际意义。
2 汽车转向抖动问题分析
发动机加速时在 2196RPM 处超标。因此可以通过路径贡献量分析查找路径贡献最大的来源。
2.1 问题查找
传递路径分析方法(TPA)即是一个有效的查找整车 NVH 问题的方法。由于传递路径分析中考虑来自各方向不同路径的所有贡献量构成的总响应。通过 TPA 找出对车内振动主导的路径,通过优化具体路径,使车内振动噪声控制在目标之内。汽车的振动基本是通过激励源、路径和接受体三部分组成。考虑到汽车受到多个激励力作用,假设车身结构为线性系统,在这系统上所有激励力的分量和某接受体形成总的响应系统。这个由结构力产生的响应表示为:
根据公式(1)为Pjtot为系统振动总响应,Pji为激励点到响应点的传递函数(FRF),Fi为激励源载荷[1]。因此找到主要路径才能快速解决问题,直接找到引起抖动的根源。
2.2 TPA 贡献量分析
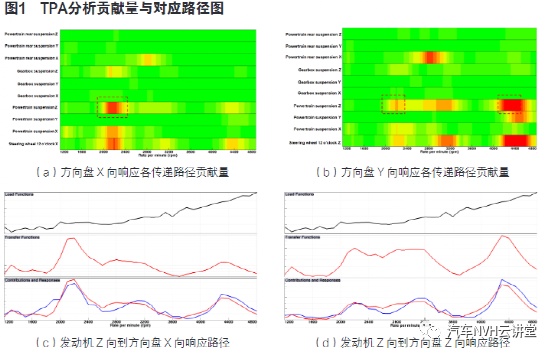
发动机激励共 9 个分量,每个分量到方向盘X或Z向共9条路径,如图1所示。影响方向盘X向主要由发动机Z向贡献最大,如图 1-(a)所示。而对应的发动机 Z 向到方盘 X 向曲线可知传递函数存在峰值与响应曲线趋势保持一致,如图 1-(C)所示。证明传递函数是占主要贡献,此激励点载荷对响应基本没有影响。同理对应方向盘 Z 向曲线也是发动机 Z 向这条路径传函其主要贡献。这样可以通过改进此传函的峰值来降低总响应的峰值。
3 转向抖动改进
3.1 转向系统模态验证
利用调整有限元模型保证与实测结果一致,经过有限元仿真结果查找问题根源。表 1为台架试验模态对比结果。转向管柱带方向盘本体进行的台架试验。共做 5 种工况较为极限的工况。分别取方向盘横摆(X)与方向盘垂向摆动(Y),仿真结果与试验结果基本接近, 因此转向系统的有限元模型可以用于问题改进应用。表 1 为安装状态转向的模态对比结果。

3.2 结构优化
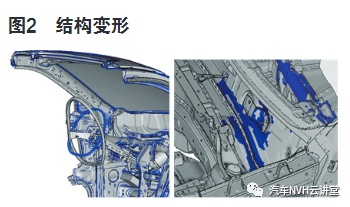
由于电机的位置布置已定,管柱本体结构基本无法更改, 仅能通过更改车身结构或方向盘本体进行优化。基于有限元模型在发动机悬置安装点处加载实际载荷并输出2196RPM下的整车模型的振型动画,方向盘本体沿着轮辐摆动剧烈。并且玻璃下横梁处与仪表板横梁相连的加强件有局部应变能集中,并且变形严重。因此可以着重对方向盘的轮辐和玻璃下横梁进行加强。
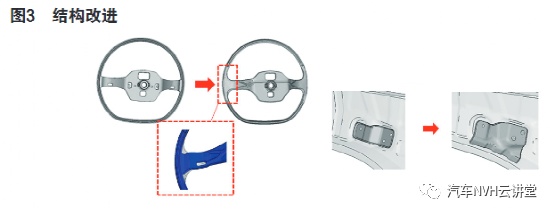
由于本车型选用两幅方向盘,轮辐与轮缘的接触面积较小, 支撑能力较弱并且轮辐较薄弱。并且轮辐没有任何特征刚度较弱。优化方案是在轮辐边缘与轮缘增加了较大的过渡,起到支撑两端的作用。并且在轮辐的背面做了些加强筋。但为了控制重量加强筋和过渡区域不能做的过大。由于车身玻璃下横梁与仪表板横梁的连接板接触面积较小,需要更改较大的支撑,以提高局部刚度。修改方案如图3 所示。
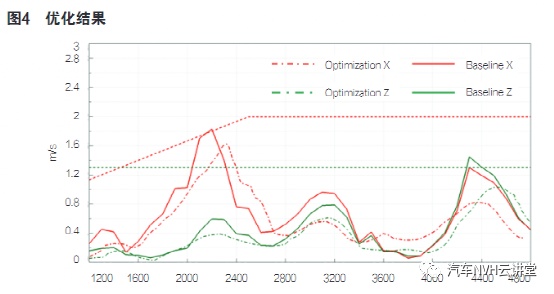
最终经过验证实际加速激励仿真分析,方向盘 X 向和 Z 向峰值有所下降并低于目标线。显然通过增加以上方案是有效的, 如图 4优化结果。
4 结论
针对本文中的某车型计算转向系统抖动的问题发现, 采用 TPA 分析的方法,能够快速地找出转向抖动的具体路径, 并对其进行优化。虽然本文未对转向进行自身进行更改,但转向自身模态也可通过更改自身结构进行优化, 但需要在开发前期对供应商进行转向对地模态的要求,并结合转向的结构特点,配合好L 与 D 的尺寸。
作者:李京福 王吉祥 鄂世国
作者单位:华晨汽车工程研究院CAE工程室 辽宁省沈阳市 110141
来源:时代汽车







最新资讯
-
2025年10大隐形车衣品牌排行榜
2025-04-07 10:40
-
沃尔沃卡车与Greenlane合作推动商业电动化
2025-04-07 08:42
-
江铃晶马:美标转欧标充电结构专利
2025-04-07 08:39
-
EMC成为新贸易壁垒,零跑在乌兹被全面叫停
2025-04-07 08:37
-
Euro-NCAP 2026 鞭打规程解读
2025-04-07 08:36
