




 广告
广告





















































WW型行星排在某混动专用箱开发中的应用
2022-01-05 20:43:39· 来源:汽车动力总成

01、某混动专用箱(DHT)结构简介该款混合动力专用变速箱是采用WW型简单行星排为耦合机构的双电机无级变速系统,主要由台阶式无齿圈行星排总成、发电机、电动机
01、某混动专用箱(DHT)结构简介
该款混合动力专用变速箱是采用WW型简单行星排为耦合机构的双电机无级变速系统,主要由台阶式无齿圈行星排总成、发电机、电动机、减速齿轮、差速器、单向离合器、双机械油泵等组成。其中太阳轮1(S1)连接发电机(ISG电机),太阳轮2(S2)连接发动机,行星架作为输出端连接着驱动动机(TM电机),结构示意图见图1。

图1 DHT结构示意图
该动力耦合机构属于输入动力分流结构,其特点是在低速高传动比的时候效率较高,类似于丰田THS系统。行星架相当于THS的齿圈,和输出端相连接,因此当车速一定时,行星架的转速就唯一确定,根据简单行星排的运动学方程,连接发电机的太阳轮S1和连接发动机的太阳轮S2,它们的转速可以自由匹配。这样发动机的转速就和车速解耦,而且能在一定区间内实现连续变动(无级变速)。
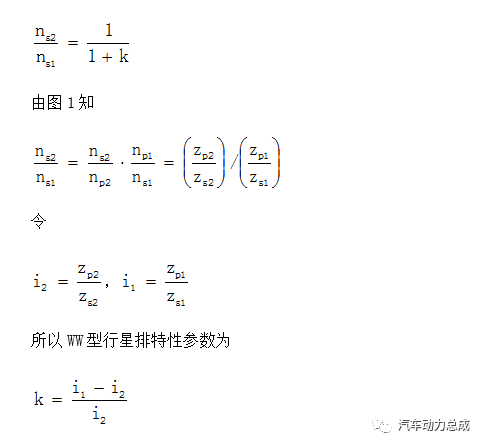
02、WW型行星排特性参数
模拟杠杆作为行星排分析的有力工具,其直观性大大降低了行星排理解上的难度。模拟杠杆如图2所示,三根纵线代表两个太阳轮和行星架的转速,以行星架为基准,齿数越少,也即速比越大的杠杆离基准越远。当行星架固定时,s1和s2的转速方向相同,因而它们分布于行星架杠杆的同一侧。设S2到基准行星架的距离为1,S1到行星架的距离为k+1,k称为行星排的特性参数。

图2 DHT行星排等效杠杆
根据定义,行星排的特性参数可以看成行星架固定时的太阳轮到齿圈的速比,这里是两个太阳轮之间的转速之比。如图2,根据三角形相似原理,有
03、转速、扭矩特性方程
该箱行星排的运动学方程如下推导
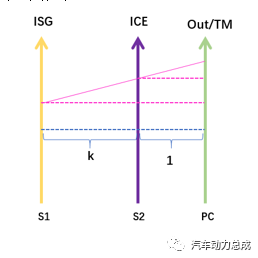
图3 转速特性示意图
如图3所示,根据三角形相似原理,有如下关系

由公式1可见,与带齿圈的简单行星排比较,该行星排的行星架相当于简单行星排的齿圈,而行星排的大太阳轮S2相当于简单行星排的行星架。
根据杠杆平衡原理,在图3中,分别对s1和pc取矩得
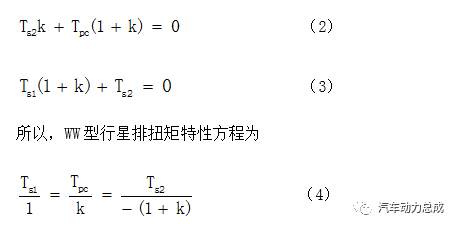
由上述方程知,行星排内部受力中s1和pc的方向相同,与s2相反。
04、电功率比例、输出效率分析
在式1中,小太阳轮s1有三种状态:1)转速为0;2)正转速;3)负转速。
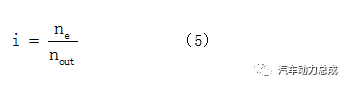
定义行星排元件的转速和发动机相同时为正转速,反之为负转速。定义发动机转速和输出端转速之比为系统传动比,即
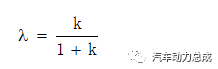
在无电池参与情况下,当小太阳轮s1转速为0时,电功率为0,发动机能量全部用于驱动车轮,系统效率最高。定义小太阳轮s1转速为0时的速比为机械点速比,即
根据小太阳的状态,系统的电功率比例、输出效率也分三种情况讨论:
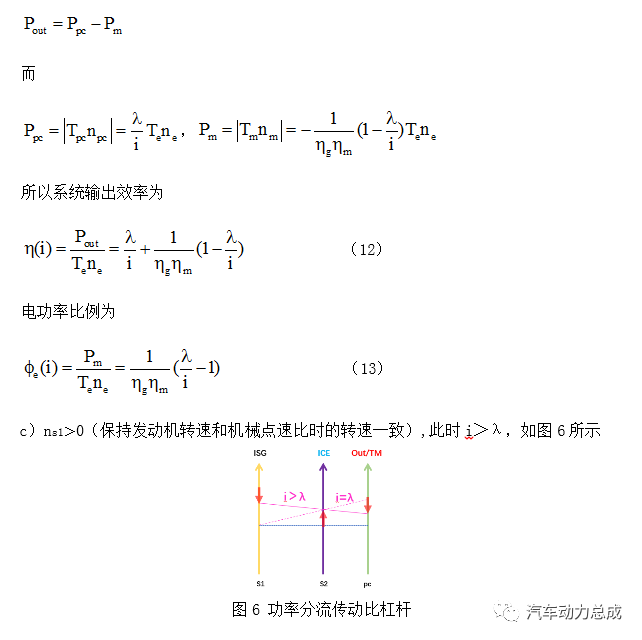
a)ns1=0,此时i=λ,如图4所示

图4 机械点传动比杠杆
由行星排各轴扭矩平衡,可得如下方程
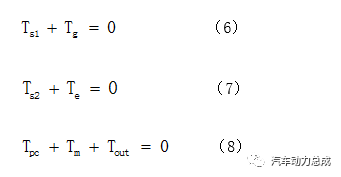
其中Ts1、Ts2、Tpc分别是小太阳轮、大太阳轮、行星架的扭矩,Tg、Tm、Te分别是发电机、驱动电机、发动机的扭矩,Tout是输出扭矩。因小太阳轮转速为0,所以电功率为0,即
Tg=0,Tm=0
联立上述方程,解得
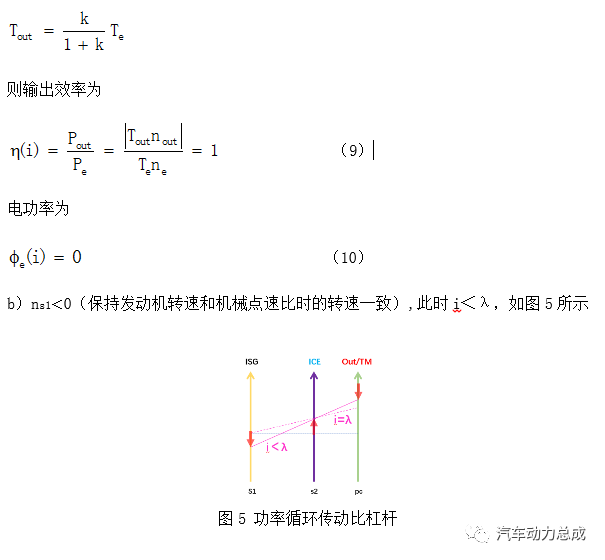
当ns1<0时,ISG电机功率大于0,为电动,TM电机功率小于0,为发电,假设系统运行过程中电池不参与,那么ISG电机的电能来自于TM电机的发电,于是根据电功率平衡得
发动机功率经过行星架后,一部分用于驱动TM电机发电,所以输出功率为
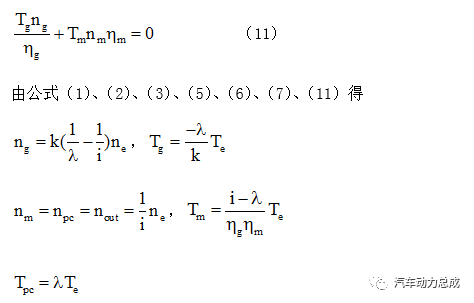
仿情形b)讨论,但此时电功率平衡方程为

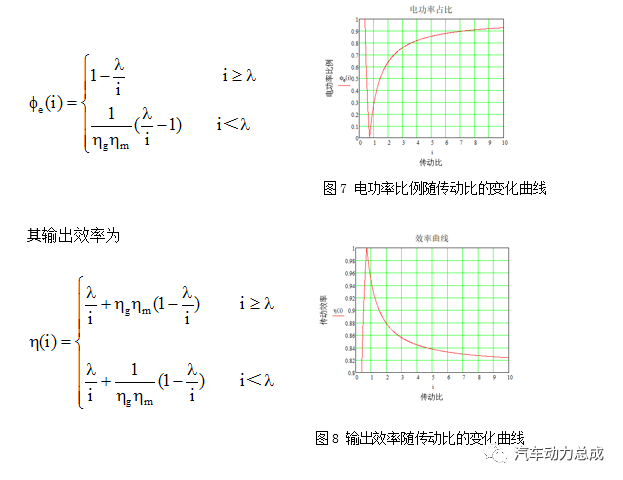
综合a)、b)、c)三种情况,行星排特性参数k取为2.65,两电机的发电或电动效率取为0.85,则该系统的电功率比例为
05、总结
根据盖世汽车《新能源汽车电驱动产业报告(2021版)》预测,DHT将成为机电一体化的发展方向,混合专用变速箱DHT在系统集成度、重量以及综合能效方面的优势非常明显。
目前我司开发的该款DHT已经搭载样车,其动力性经济性的表现获得国内一众主机厂的广泛认可。
WW型行星排在动力系统中的应用并不多见,对其认识不够深入。



编辑推荐




最新资讯
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
-
「智能座椅」东风日产N7为何敢称“百万级大
2025-04-03 08:31
-
基于加速度计补偿的俯仰角和路面坡度角估计
2025-04-03 08:30
-
《北京市自动驾驶汽车条例》正式实施 L3级
2025-04-02 20:23
