




 广告
广告





















































AVL车辆列队行驶(Platooning)自动驾驶技术
2022-01-07 23:58:38· 来源:AVL李斯特

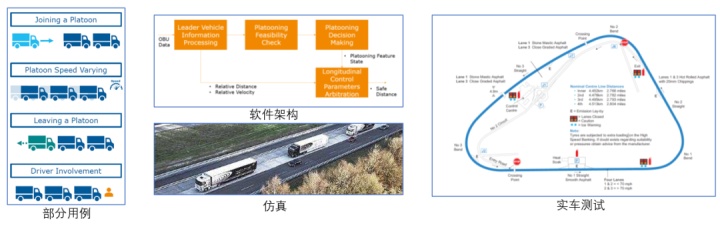
一 、功能介绍 车辆列队行驶功能(Platooning)主要应用在高速公路场景。该功能是指两辆及以上的车辆列队行驶,头车提供路线、速度以及位置信息,队列中的后车自
一 、功能介绍
车辆列队行驶功能(Platooning)主要应用在高速公路场景。该功能是指两辆及以上的车辆列队行驶,头车提供路线、速度以及位置信息,队列中的后车自动通过加速、减速和转向跟随前车的路径并且与前车保持相对的安全距离。
头车由驾驶员驾驶,后车尽管有驾驶员在车内,但是当功能开启时,车辆可以自动跟随前车行驶。后车的驾驶员可以在任意时刻选择加入或者退出车辆队列。后车驾驶员也可以通过干涉加速踏板,方向盘,制动踏板等使车辆推出列队行驶功能。
此功能主要应用于高速物流卡车行业,可以给客户带来以下效益:
· 减少燃油消耗,节省燃料成本。以三车列队行驶为例,车间距控制在13m左右,
燃油经济性可以提高2%-15%左右。
· 提升交通安全(相比驾驶员,可以实现更快速的制动,也可以减少驾驶员由于长途驾驶导致的疲劳)
· 提升驾驶员时间利用率,传统的长途物流车辆,一辆车需要配备2名司机,有列队行驶功能的车辆后车只需要1名驾驶员即可,可以减少物流成本。
二、开发概览
-
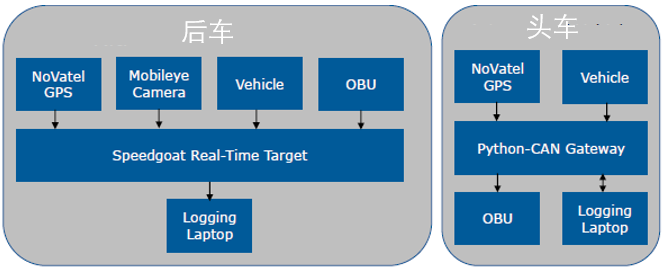
系统配置
· 头车传感器配置:Mobileye摄像头,高精度NoVatel GPS系统
· 后车传感器配置:高精度NoVatel GPS系统
· OBU负责实现车与车之间的通讯(V2V)
· Speedgoat负责运行列队行驶功能的算法
在实际的客户项目中,系统的配置会根据不同的特性需求可能会有调整。
-
开发概览



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
