




 广告
广告





















































SOTIF工作组子任务 “高速公路巡航系统SOTIF开发及测试评价”2021阶段性成果
2022-01-13 00:24:33· 来源:智能网联汽车产业创新联盟

引言12月5日- 12月11日,中国智能网联汽车产业创新联盟预期功能安全工作组(下称SOTIF工作组)联合吉林大学、通用技术中国汽研,在通用技术中国汽研智能网联汽车
引言
12月5日- 12月11日,中国智能网联汽车产业创新联盟预期功能安全工作组(下称“SOTIF工作组”)联合吉林大学、通用技术中国汽研,在通用技术中国汽研智能网联汽车试验基地顺利开展了高速公路巡航系统(HWP)场地试验。至此,持续将近一年的SOTIF工作组子任务之一“高速公路巡航系统SOTIF开发及测试评价”2021年度重点工作全部告一段落。
此次SOTIF测评试验主要针对切入(cut-in)场景下高速公路巡航系统(HWP)进行了测试,在测试方法、评价规程、测试数据分析等方面,为建立预期功能安全测试评价的中国方案提供强有力支撑。
下面对本次HWP实车场地测试的背后工作进行简要介绍,希望为行业开展类似工作提供一定的参考。
前期调研及任务小组形成
在任务开展初期,SOTIF工作组HWP任务小组对该领域进行了充分调研,并确定了基于场景的SOTIF开发与测试评价的研究思路,在现有国内外标准及最佳实践基础上,提出比较容易落地和实践的高速公路巡航系统SOTIF开发及测试评价流程。
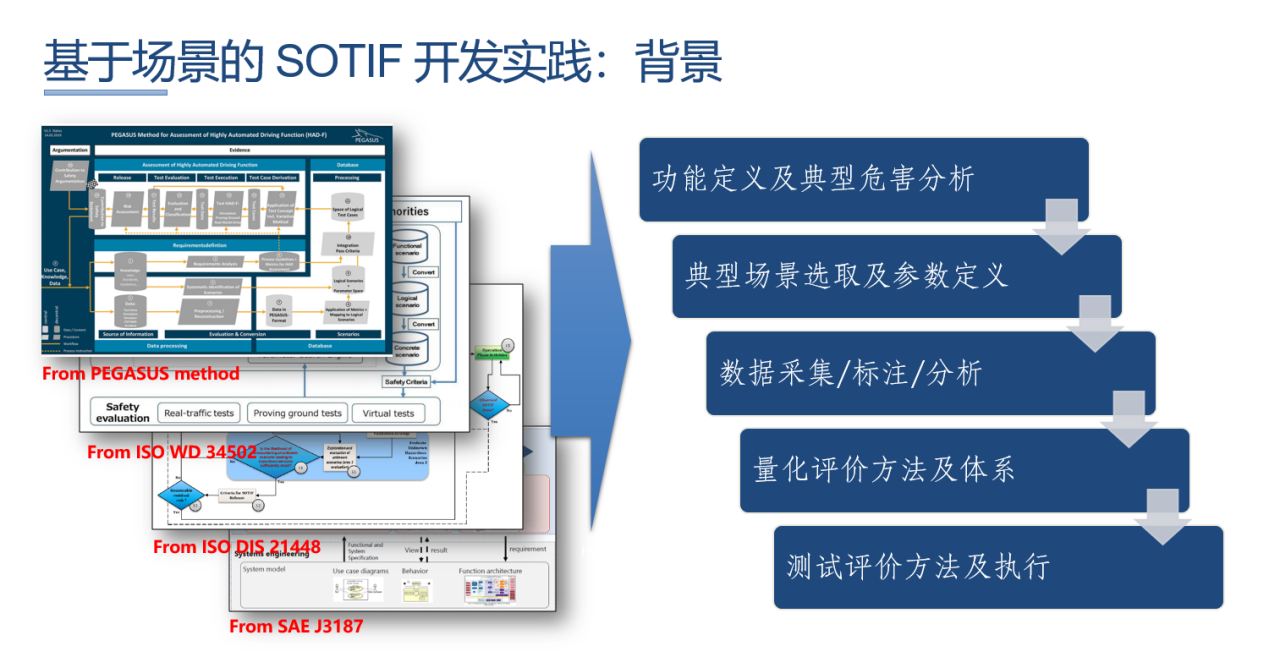
为了更好地支撑各步骤的工作顺利开展,SOTIF工作组完善了HWP任务小组的成员构成,并通过对HWP系统的运行场景分析,讨论确定选取中国特色场景cut-in作为场景示例,各步骤分工协作地推进研究工作。

功能定义及典型危害分析
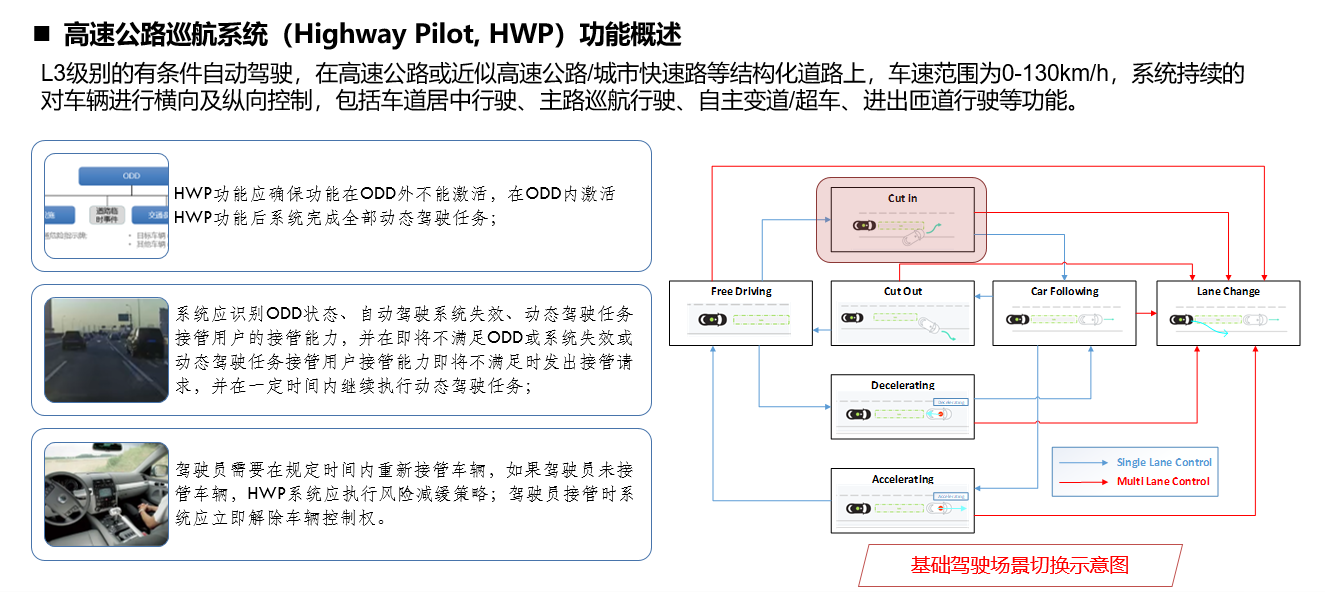
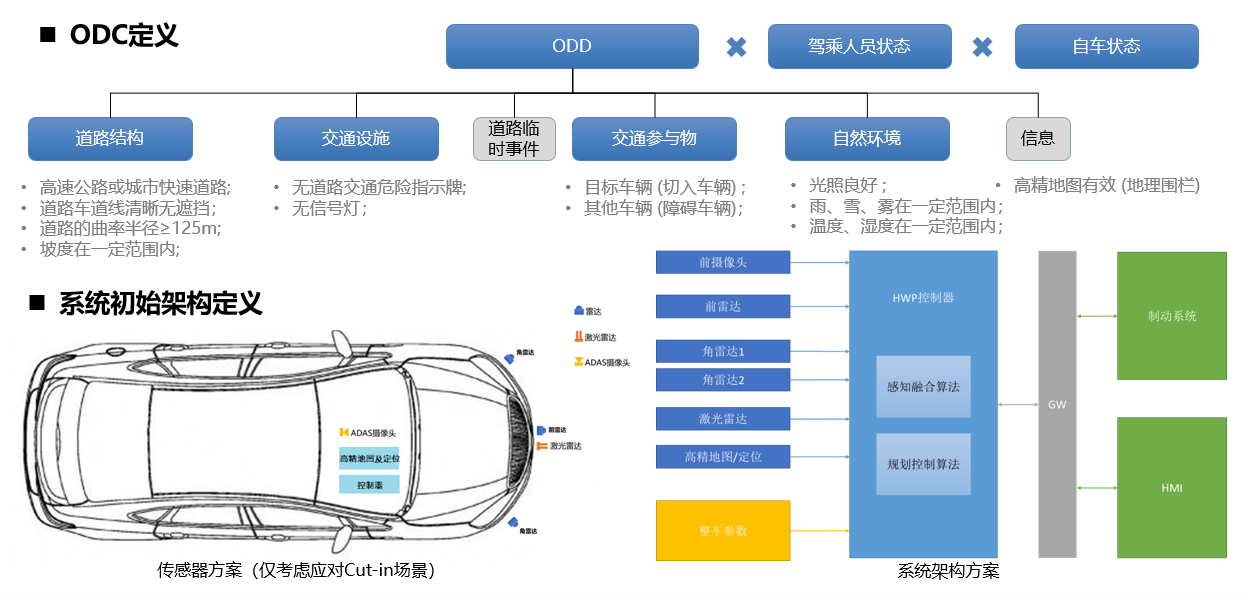
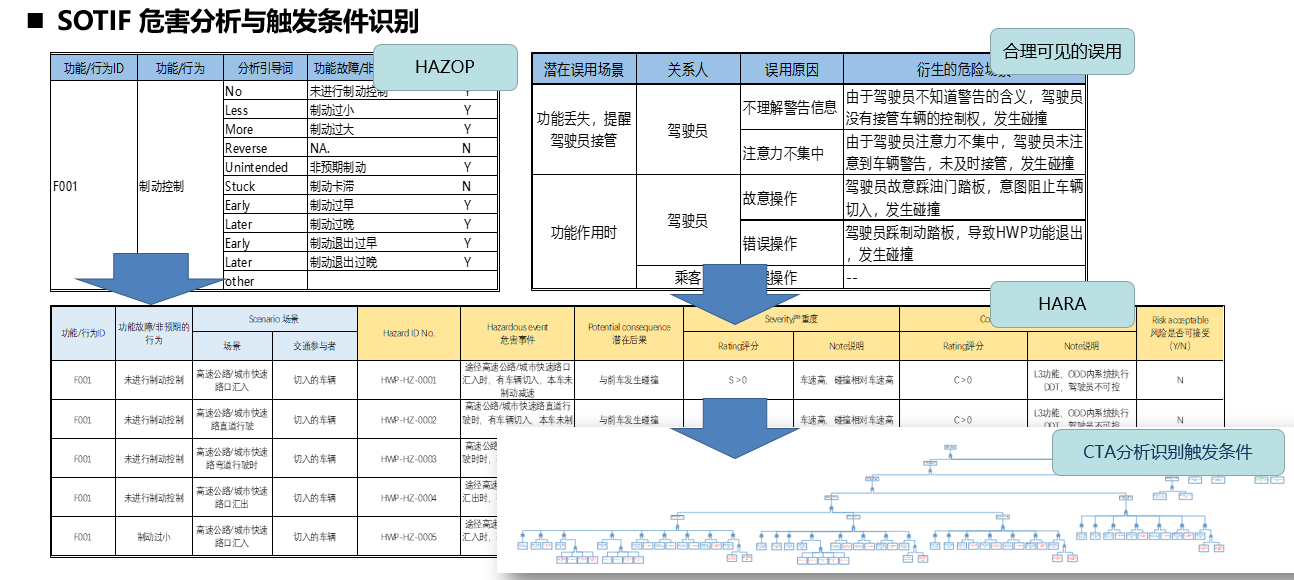
从高速公路巡航系统(Highway Pilot, HWP)的功能出发,确定该功能的运行设计条件,包括运行设计域(ODD)、乘员状态及本车状态,并建立HWP系统初始架构,从而明确SOTIF典型危害分析的对象提取功能需求,在危害分析和风险评估的过程中,充分利用SOTIF HARA,CTA,STPA等不同分析方法的优缺点,识别预期功能安全相关危害事件、性能局限及可预见的人为误用等。
典型场景选取及关键参数定义
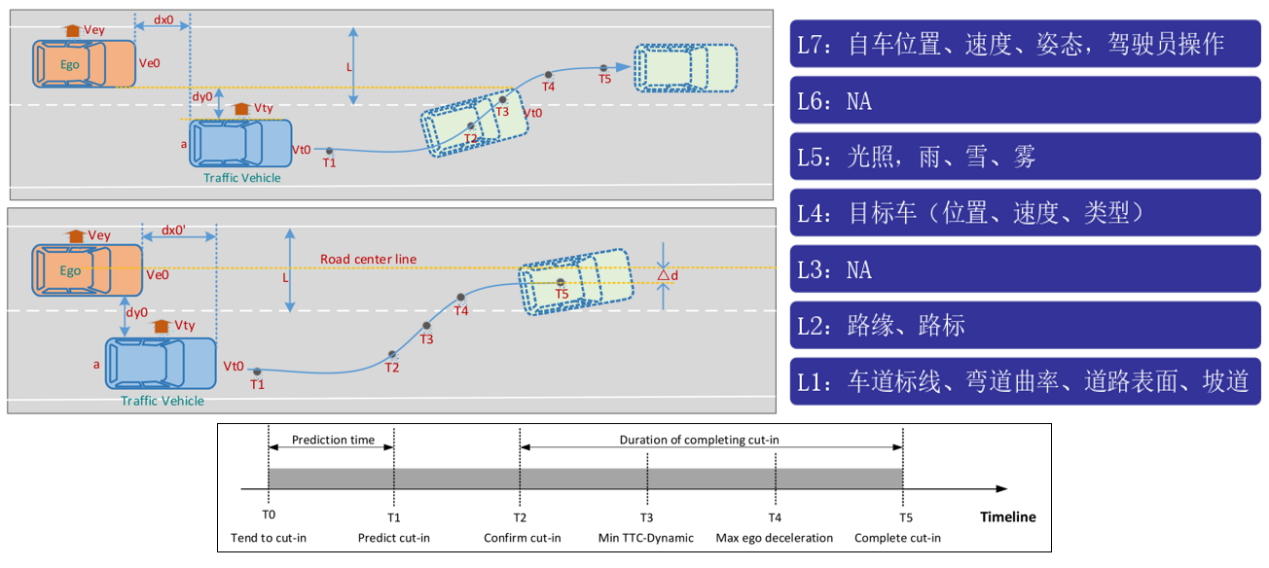
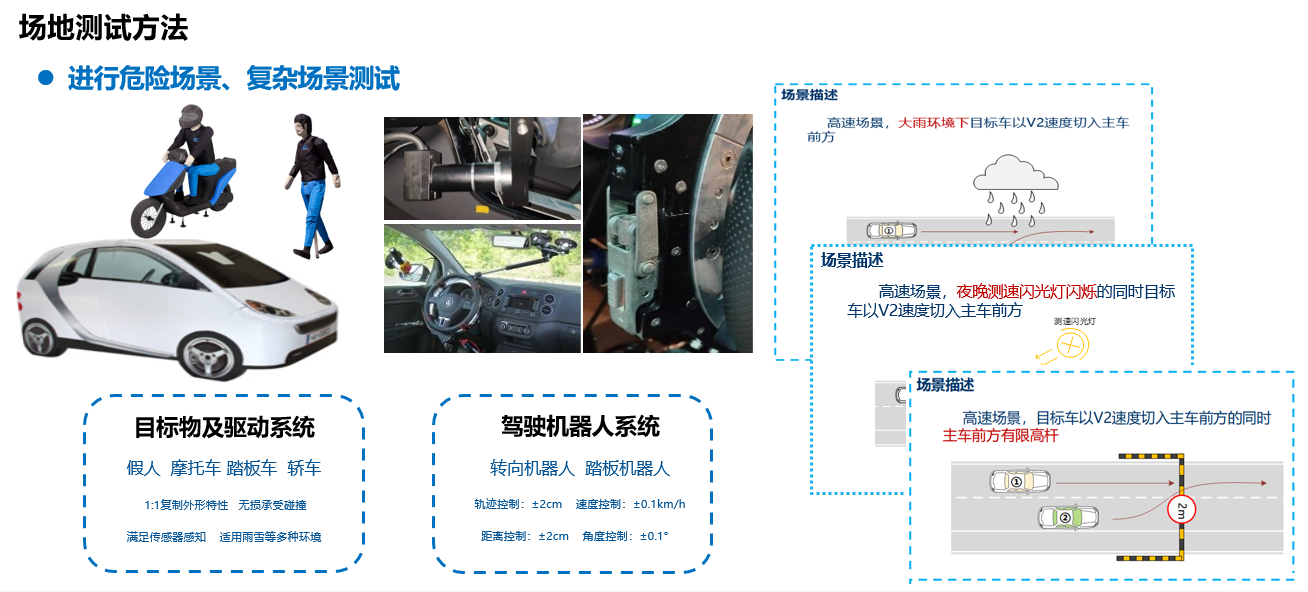
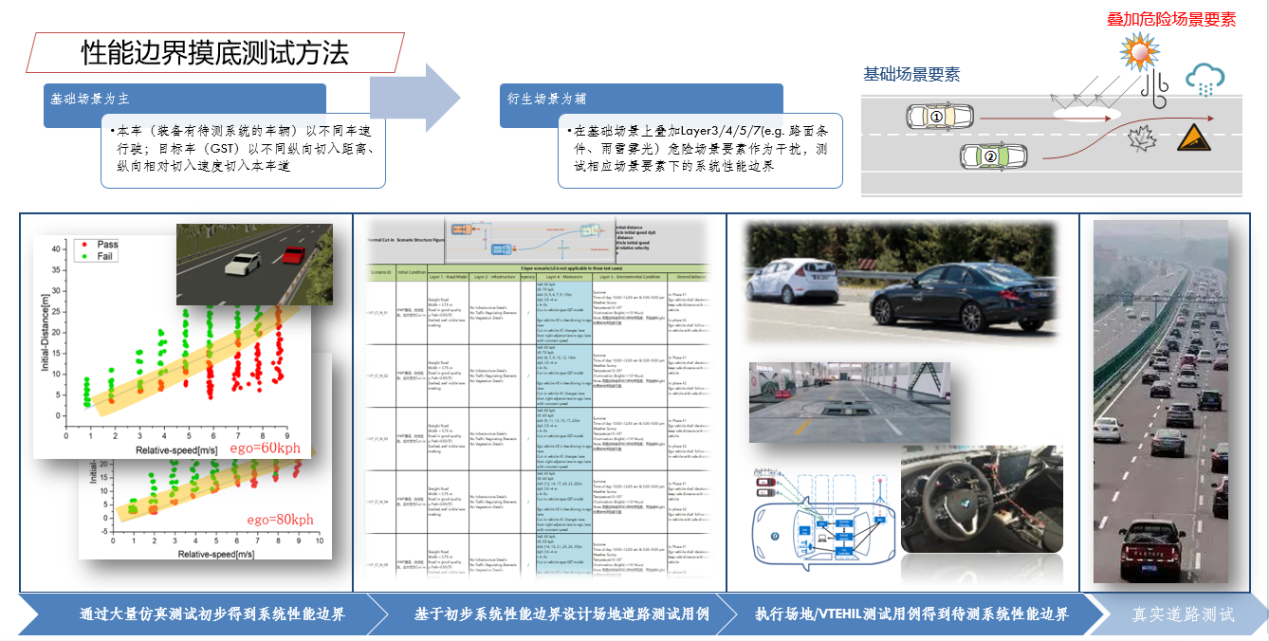
对cut-in场景进行详细定义,界定目标车cut-in轨迹、cut-in时间、cut-in距离、cut-in过程关键时间点等参数含义,并结合SOTIF工作组提出的七层场景模型识别对cut-in场景有重要影响的场景元素,为量化评价体系提供可量化输入。同时,以L1和L4层为基础,区分了cut-in场景的基础场景和叠加场景要素,为后续进行更完备的测试评价提供参考。

数据采集方面/标注/分析
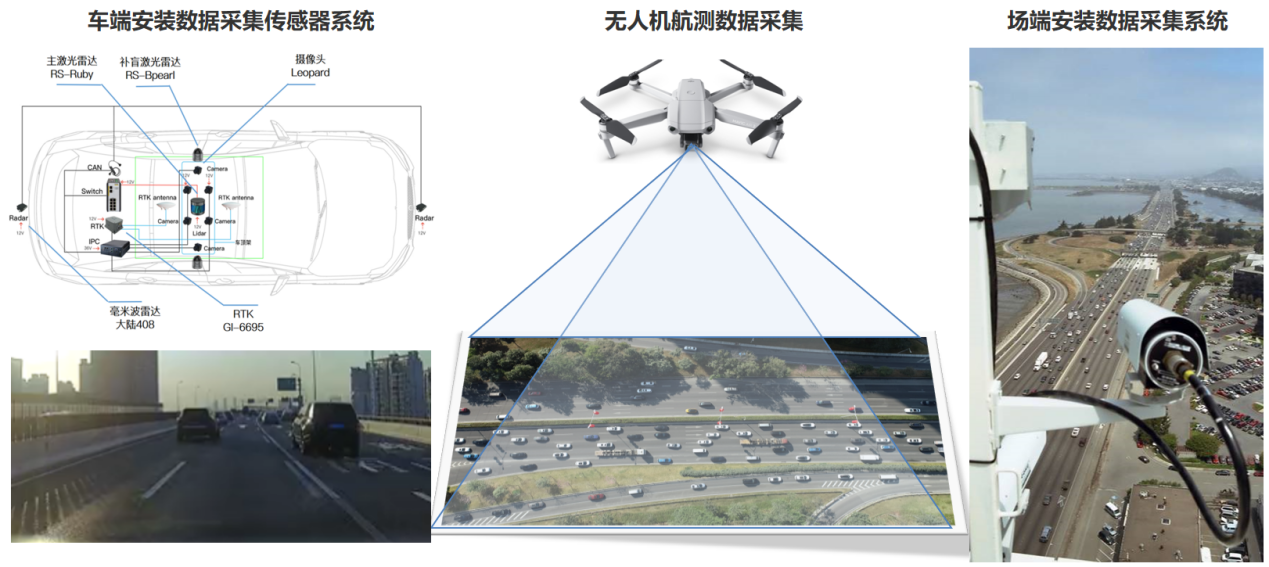
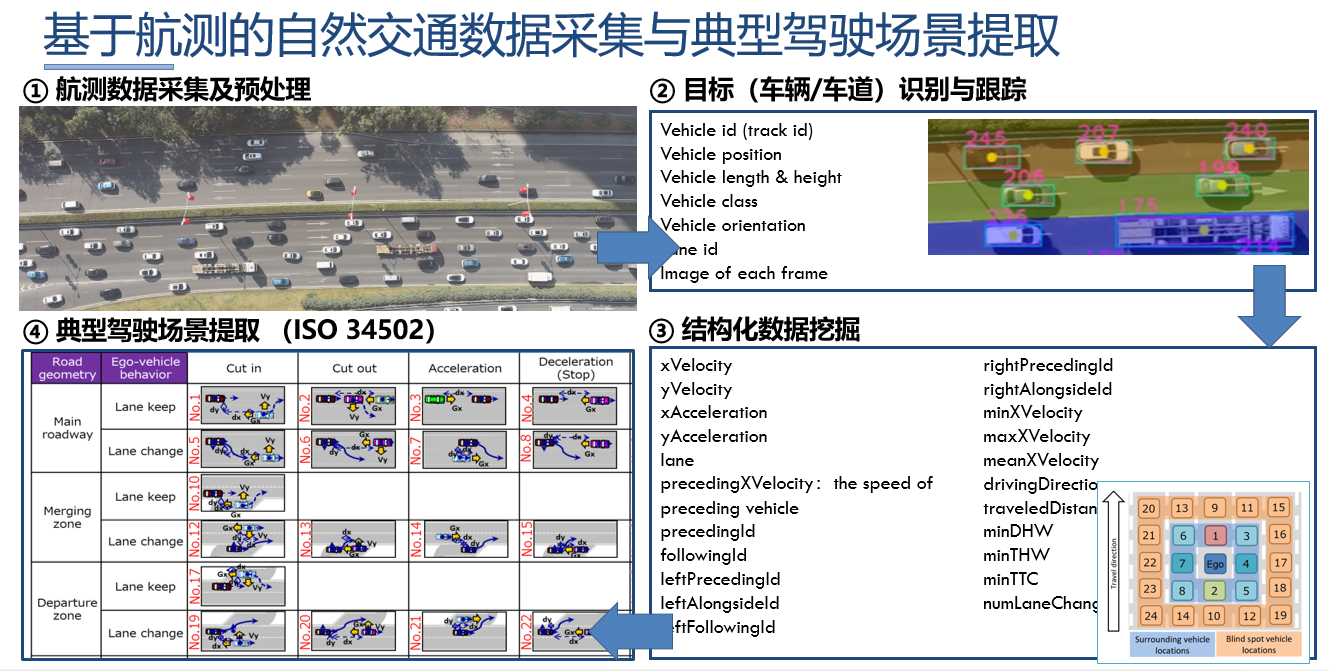
HWP任务小组对不同的数据采集形式进行了分析和对比,最终选取车端采集和无人机采集相结合的方法,多方位全面地对cut-in场景进行采集,使得场景数据更丰富完整,且能够反映真实、无干扰的人类驾驶行为。其中,任务小组创造性地利用“基于航测的自然交通数据采集与典型驾驶场景提取”方法,高效地采集了大量典型驾驶场景数据,正在进行数据开源后期准备工作,预期为高速公路巡航系统的开发和测试评价提供数据支撑。
量化评价方法及体系
预期功能安全的量化评价是ISO 21448标准工作组中国标准专家组的重要提案,在最新标准草案中也多处体现了对量化评价的强烈需求。
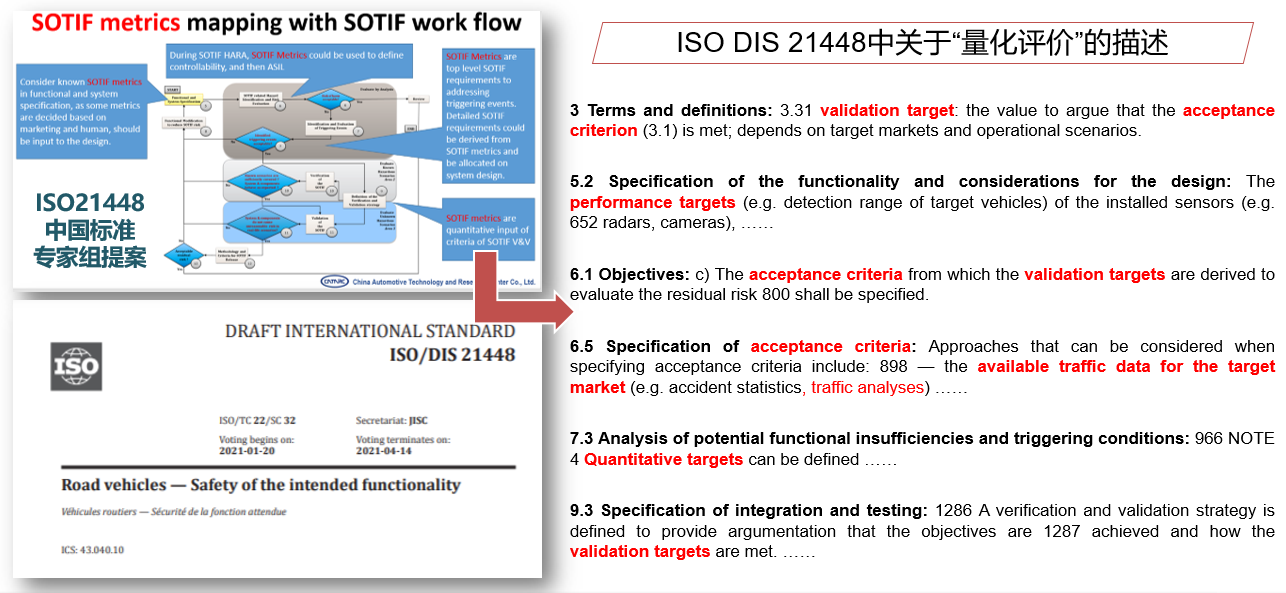
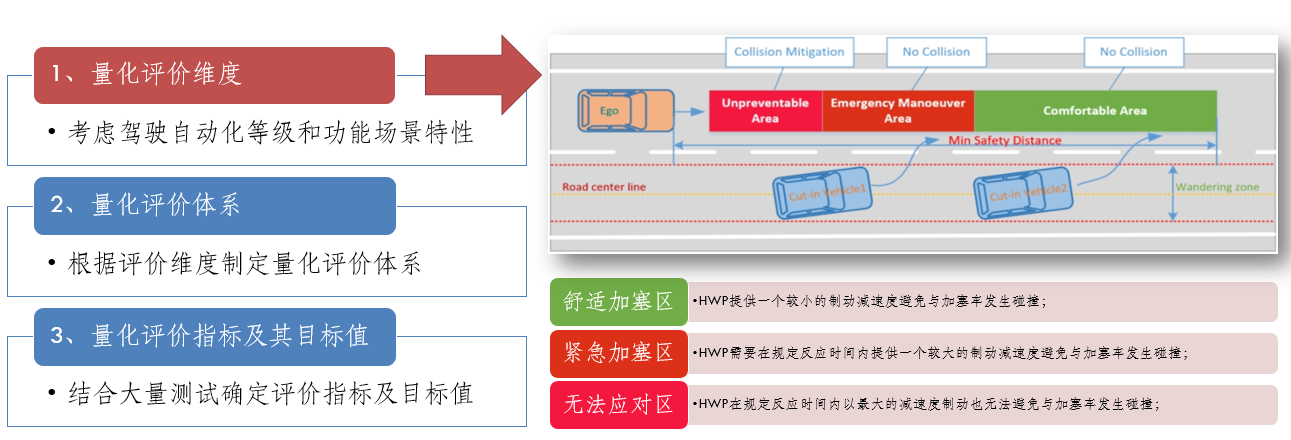
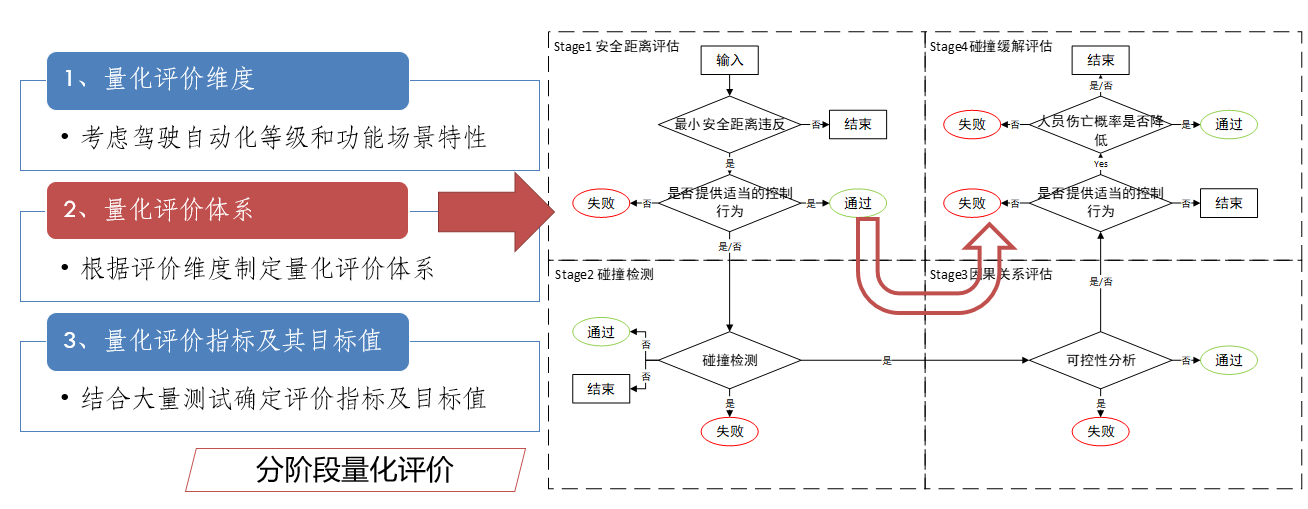
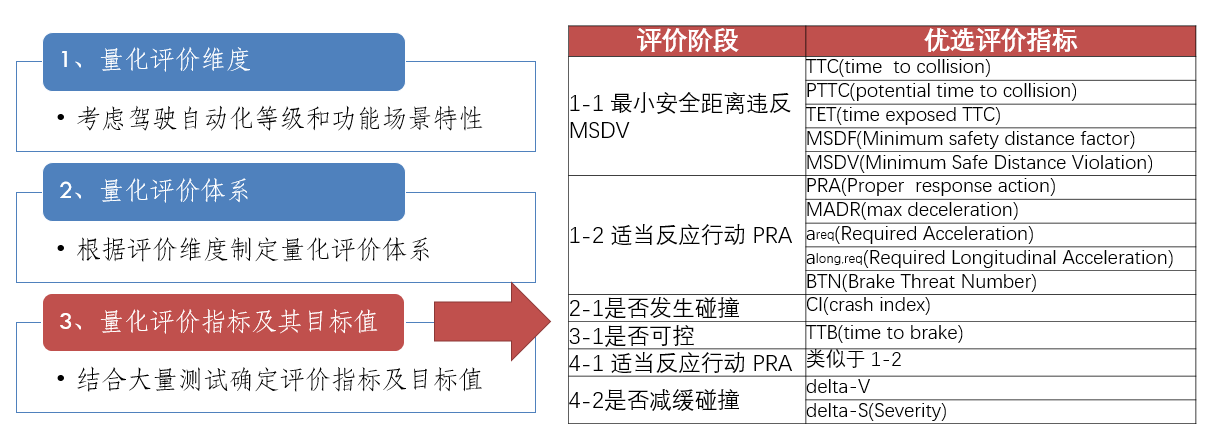
然而,SOTIF量化评价也是业界面临的一大难题。HWP任务小组以应对cut in场景为例,从多个维度来衡量评估整车级HWP应对cut-in场景的好坏,并分析出舒适加塞区、紧急加塞区、无法应对区,分区域对HWP功能全面进行评价,最终形成科学完善的分阶段SOTIF量化评价体系。
值得一提的是,前期采集的航测数据可以提取人类驾驶员应对cut-in场景的驾驶能力指标,进而为HWP应对该场景的相应评价指标提供对比参照依据。
测试方法
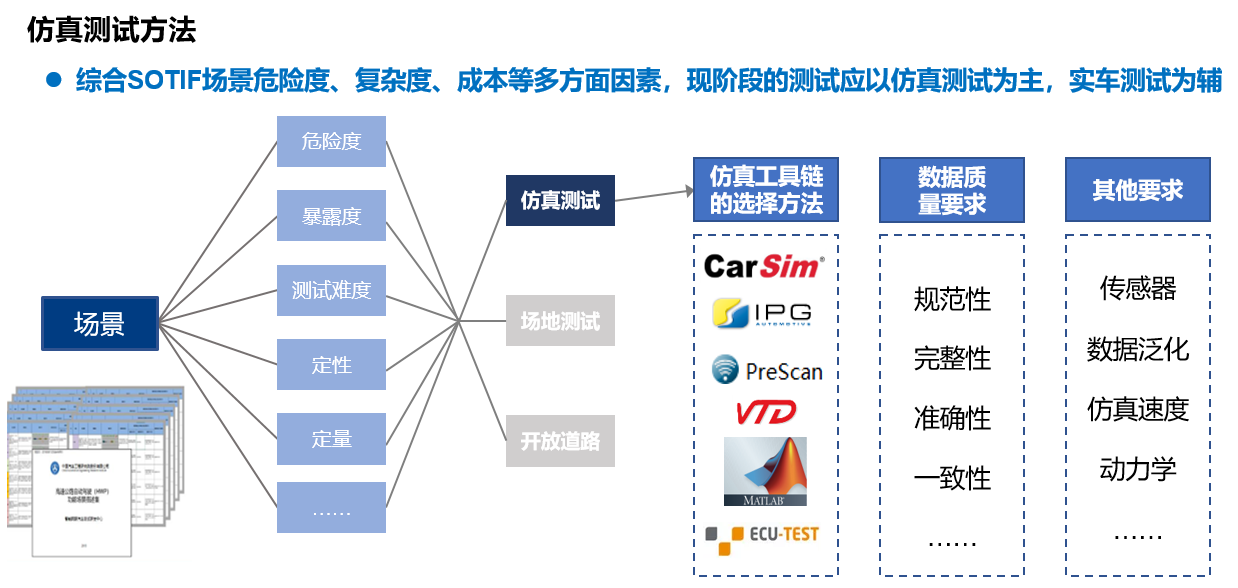
结合HWP任务小组成员单位在自动驾驶测评领域丰富经验,对自动驾驶系统的多支柱法进行详尽的规划,最终结合量化评价体系需求,形成了“基础场景为主、衍生场景为辅”、“通过大规模仿真测试初步探知系统性能边界、进而设计实车场地测试用例”等方法,进而分析其对实车系统验证和确认工作的要求,形成一套可靠、可执行性高的实车测试方法。
值得注意的是,上述研究工作也仅为各项工作组的探索性开端,随着研究的深入,任务小组发现仅仅是一个应对cut-in场景还需要更深入的研究,而完善的高速公路巡航系统预期功能安全测试评价则需要开展大量的后续工作,例如:顶层的SOTIF通过准则需要巨量的数据支撑、顶层通过准则向下分解至评价指标的方法、评价指标的具体目标值的确定、大量衍生场景元素的测试执行等等,而这些工作是不可能由一家主机厂或供应商单独完成的,需要行业中政产学研多方的高效配合。
SOTIF工作组在2022年还将继续开展更深入的SOTIF测试和量化评价工作,希望对此感兴趣的高校、企业和研究机构积极参与,一同攻克SOTIF行业难题。
12月5日- 12月11日,中国智能网联汽车产业创新联盟预期功能安全工作组(下称“SOTIF工作组”)联合吉林大学、通用技术中国汽研,在通用技术中国汽研智能网联汽车试验基地顺利开展了高速公路巡航系统(HWP)场地试验。至此,持续将近一年的SOTIF工作组子任务之一“高速公路巡航系统SOTIF开发及测试评价”2021年度重点工作全部告一段落。
此次SOTIF测评试验主要针对切入(cut-in)场景下高速公路巡航系统(HWP)进行了测试,在测试方法、评价规程、测试数据分析等方面,为建立预期功能安全测试评价的中国方案提供强有力支撑。
下面对本次HWP实车场地测试的背后工作进行简要介绍,希望为行业开展类似工作提供一定的参考。
前期调研及任务小组形成
在任务开展初期,SOTIF工作组HWP任务小组对该领域进行了充分调研,并确定了基于场景的SOTIF开发与测试评价的研究思路,在现有国内外标准及最佳实践基础上,提出比较容易落地和实践的高速公路巡航系统SOTIF开发及测试评价流程。
为了更好地支撑各步骤的工作顺利开展,SOTIF工作组完善了HWP任务小组的成员构成,并通过对HWP系统的运行场景分析,讨论确定选取中国特色场景cut-in作为场景示例,各步骤分工协作地推进研究工作。
功能定义及典型危害分析
从高速公路巡航系统(Highway Pilot, HWP)的功能出发,确定该功能的运行设计条件,包括运行设计域(ODD)、乘员状态及本车状态,并建立HWP系统初始架构,从而明确SOTIF典型危害分析的对象提取功能需求,在危害分析和风险评估的过程中,充分利用SOTIF HARA,CTA,STPA等不同分析方法的优缺点,识别预期功能安全相关危害事件、性能局限及可预见的人为误用等。
典型场景选取及关键参数定义
对cut-in场景进行详细定义,界定目标车cut-in轨迹、cut-in时间、cut-in距离、cut-in过程关键时间点等参数含义,并结合SOTIF工作组提出的七层场景模型识别对cut-in场景有重要影响的场景元素,为量化评价体系提供可量化输入。同时,以L1和L4层为基础,区分了cut-in场景的基础场景和叠加场景要素,为后续进行更完备的测试评价提供参考。
数据采集方面/标注/分析
HWP任务小组对不同的数据采集形式进行了分析和对比,最终选取车端采集和无人机采集相结合的方法,多方位全面地对cut-in场景进行采集,使得场景数据更丰富完整,且能够反映真实、无干扰的人类驾驶行为。其中,任务小组创造性地利用“基于航测的自然交通数据采集与典型驾驶场景提取”方法,高效地采集了大量典型驾驶场景数据,正在进行数据开源后期准备工作,预期为高速公路巡航系统的开发和测试评价提供数据支撑。
量化评价方法及体系
预期功能安全的量化评价是ISO 21448标准工作组中国标准专家组的重要提案,在最新标准草案中也多处体现了对量化评价的强烈需求。
然而,SOTIF量化评价也是业界面临的一大难题。HWP任务小组以应对cut in场景为例,从多个维度来衡量评估整车级HWP应对cut-in场景的好坏,并分析出舒适加塞区、紧急加塞区、无法应对区,分区域对HWP功能全面进行评价,最终形成科学完善的分阶段SOTIF量化评价体系。
值得一提的是,前期采集的航测数据可以提取人类驾驶员应对cut-in场景的驾驶能力指标,进而为HWP应对该场景的相应评价指标提供对比参照依据。
测试方法
结合HWP任务小组成员单位在自动驾驶测评领域丰富经验,对自动驾驶系统的多支柱法进行详尽的规划,最终结合量化评价体系需求,形成了“基础场景为主、衍生场景为辅”、“通过大规模仿真测试初步探知系统性能边界、进而设计实车场地测试用例”等方法,进而分析其对实车系统验证和确认工作的要求,形成一套可靠、可执行性高的实车测试方法。
值得注意的是,上述研究工作也仅为各项工作组的探索性开端,随着研究的深入,任务小组发现仅仅是一个应对cut-in场景还需要更深入的研究,而完善的高速公路巡航系统预期功能安全测试评价则需要开展大量的后续工作,例如:顶层的SOTIF通过准则需要巨量的数据支撑、顶层通过准则向下分解至评价指标的方法、评价指标的具体目标值的确定、大量衍生场景元素的测试执行等等,而这些工作是不可能由一家主机厂或供应商单独完成的,需要行业中政产学研多方的高效配合。
SOTIF工作组在2022年还将继续开展更深入的SOTIF测试和量化评价工作,希望对此感兴趣的高校、企业和研究机构积极参与,一同攻克SOTIF行业难题。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
