




 广告
广告





















































初探自动驾驶的事故场景
2022-01-15 10:13:35· 来源:广汽研究院集成安全技术部

初探自动驾驶的事故场景自动驾驶技术可以有效地减少交通事故的发生率是一个行业共识,但不完全的自动驾驶技术和不完全的市场占有率仍然会在未来的20~30年引发大
初探自动驾驶的事故场景
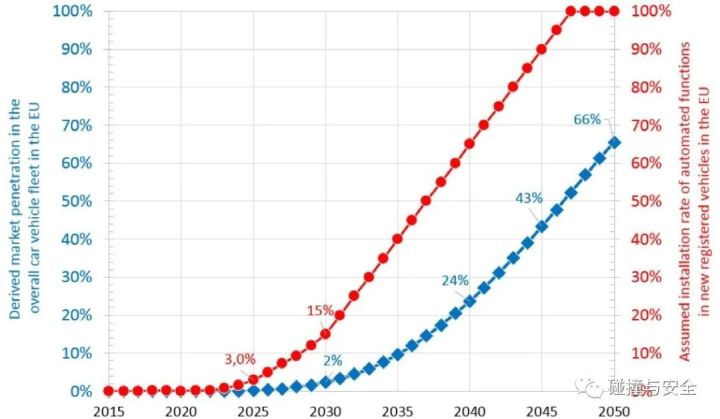
自动驾驶技术可以有效地减少交通事故的发生率是一个行业共识,但不完全的自动驾驶技术和不完全的市场占有率仍然会在未来的20~30年引发大量的交通事故。欧盟OSCCAR项目和美国NTSHA给出了相似的结论:依据自动驾驶汽车市场渗透的乐观预测(图1),最早在 2045 年,自动驾驶汽车和传统汽车将在欧盟境内的道路上平等分布。自动驾驶汽车在很长一段时间内都会面临与当前事故情况相当的事故。此外,自动驾驶汽车的安全标准可能比现有车辆更高,并且可能受到更多的审查。因此,乘员保护技术的升级是必然的。
PIC.01
欧盟自动驾驶汽车市场占有率的乐观预测
01、混合交通的事故场景和工况
我们熟悉的标准碰撞工况——无论是法规规定的,还是NCAP和CIASI规程中的,都源自于对过往交通事故的统计。当一类事故的伤亡占比足以引起社会普遍关注时,我们就设置一个碰撞工况用于考察车辆在这一类事故的表现。而工况具体的参数设定(如碰撞速度、角度、重叠率等)需要进一步分析这类事故中的人员伤害数据,从而选取一组足以覆盖大部分伤害程度(如60%)的参数。
然而当自动驾驶技术快速引入市场时,这些只包含人类驾驶的事故数据无法反映自动驾驶技术对交通事故的改变,而且数据累积是一个缓慢的过程,因此,这套传统的定义标准工况的方法显得太过滞后,无法及时指引车辆安全技术适应自动驾驶技术的发展。
于是“在自动驾驶汽车参与道路交通的情况下交通事故是什么样的”成了首先需要解答的问题。2018年欧盟OSCCAR(Future occupant safety for crashes in cars)项目公布了一份关于“自动驾驶汽车混合交通下事故场景预测”的报告,给出了包含碰撞工况、乘员姿态和乘员特征的测试矩阵。
OSCCAR项目的基本思路是:首先在现有事故数据库的事故中通过自下而上(图2)和自上而下法(图4)排除掉自动驾驶技术可以避免和降低至低伤害的事故,然后对剩余事故再进行聚类,并引入新的乘员姿态和特征形成测试工况。
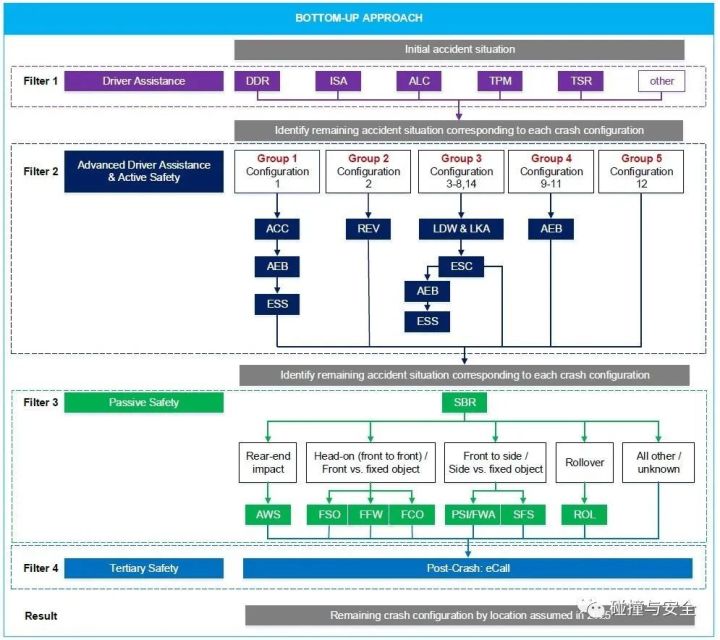
自下而上排除法示意图
在自下而上法中,首先在两车和单车的事故中挑选出驾驶辅助系统(ADAS)可以起作用的事故,并基于标准的事故重建场景和主动安全仿真方法估计ADAS的作用。排除掉ADAS可以避免的事故后,将剩余事故碰撞时刻的车辆状况作为边界条件输入标准的被动安全仿真场景,排除掉轻伤事故。最后,认为剩下的事故便是即使ADAS作用仍然会造成严重伤害的事故。实际上前瞻室也用了相似的方法对CIDAS数据库进行了预研。这个方法从逻辑上看十分完美,但我们实践发现当中仍然存在许多问题,如碰撞前的交通情况、ADAS性能、车辆运动控制都难以复现和进行统一仿真。OSCCAR项目同样提出了这些的问题,他们的解决方案是建立OSCCAR标准的交通流、AEB模型、车辆运动模型和约束系统模型进行估算(图3)。因此,尽管自下而上法目的是估计ADAS对未来事故情况的影响,但其过程并不完美。
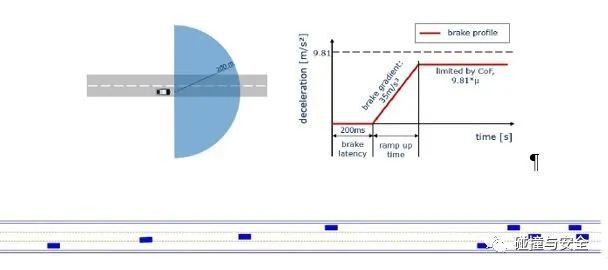
OSCCAR标准的雷达模型、AEB模型、交通流模型
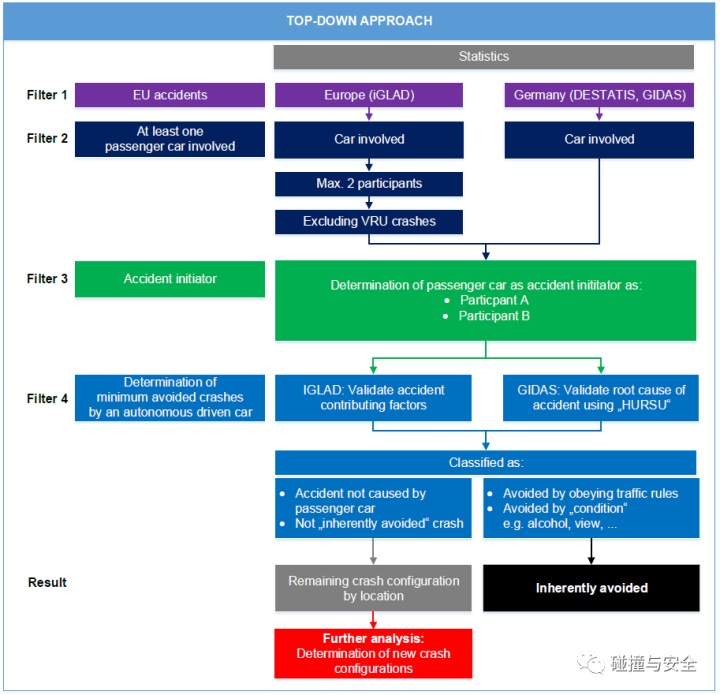
自上而下排除法示意图
自上而下法则比较简单明了。在自动驾驶可以完全避免人为错误(超速、违反路权)的假设下,首先找出这些人为错误导致的事故,然后对这些人为错误逐个假设自动驾驶取代人类驾驶,看看剩下哪些事故是即使自动驾驶也无法避免的事故,如图5所示。
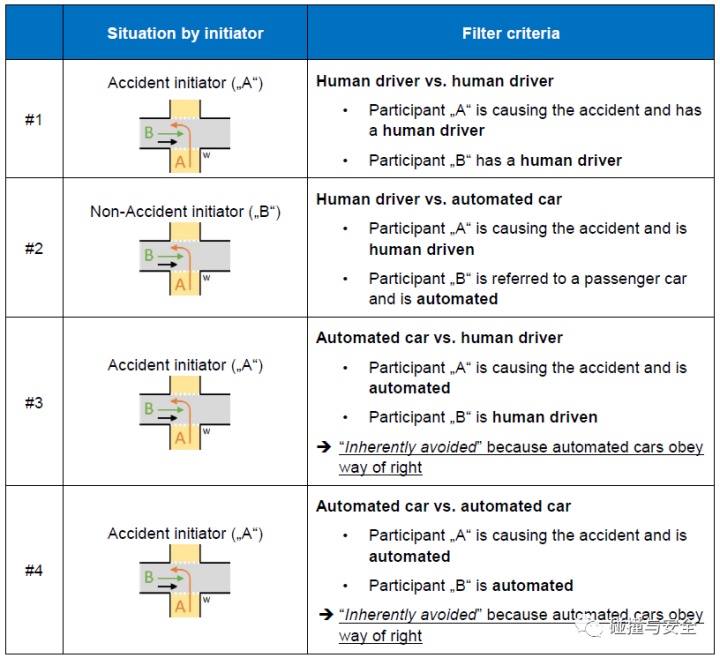
自上而下法的应用示例
利用这两个方法对德国的事故进行分析并外推至全欧洲,得到如图6所示的结论:仍有39%的城市事故、41%的非城市事故、48%的高速路事故是自动驾驶系统无法避免的事故。并且这些事故仍然包含了所有现有的事类型。图7展示了几个主要国家的剩余事故场景。最后,OSCCAR总结性地给出了图8所示的5个典型的剩余事故场景。
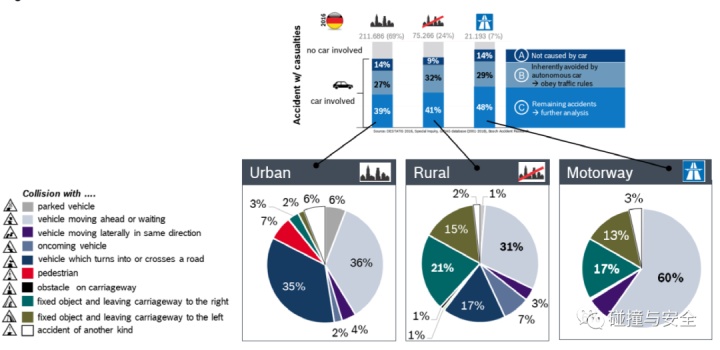
剩余事故的总体情况
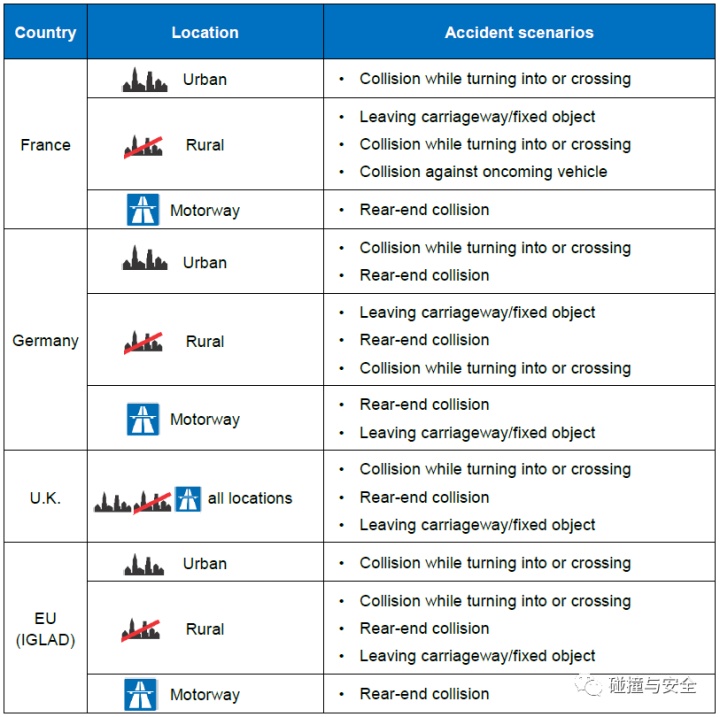
主要国家的剩余事故场景
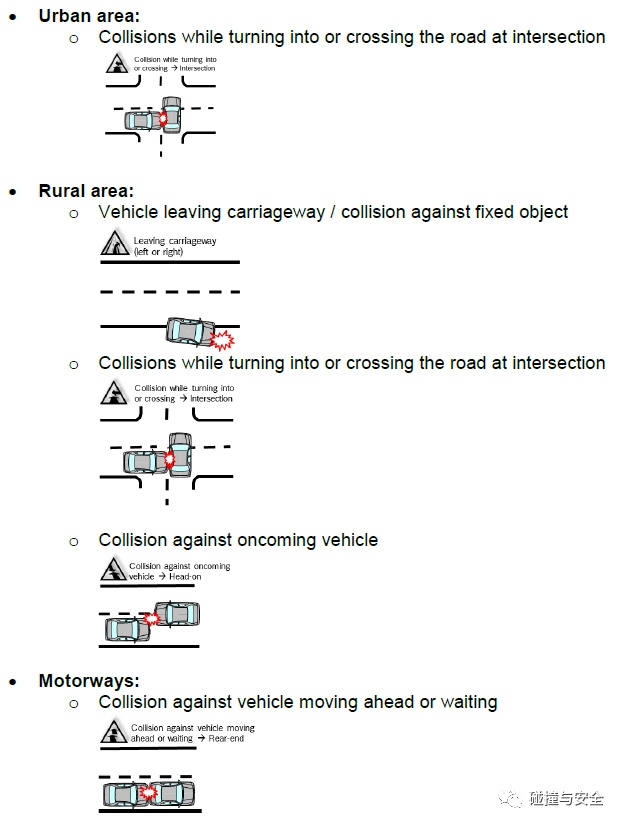
典型剩余事故场景示意图
在得到剩余事故场景后,又通过聚类法进一步分析单一场景中碰撞速度、碰撞角度、碰撞重叠率等参数的占比,从而得到更具体的碰撞工况。图9展示了瑞典十字路口的剩余事故聚类情况。
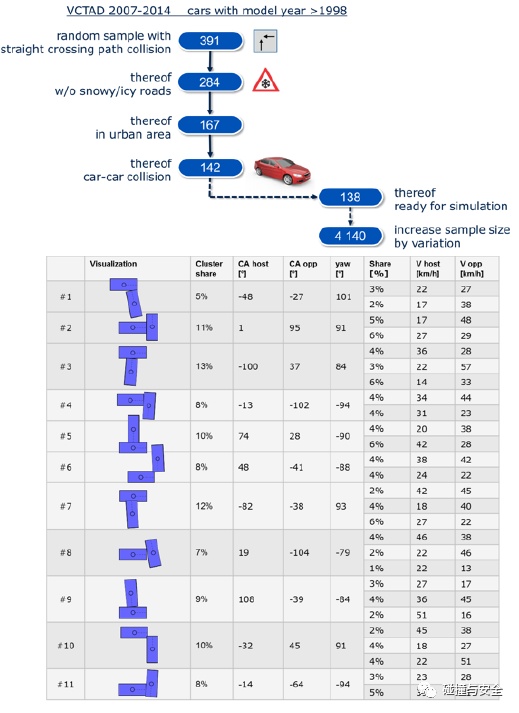
瑞典十字路口的剩余事故聚类情况
可以看到尽管OSCCAR寻找的是“自动驾驶汽车混合交通下的事故场景”,但他们没有提出新的碰撞场景,而是基于现有的碰撞数据库找出剩余碰撞场景,并区分出更精细的碰撞工况。因此,某种意义上OSCCAR项目是在指引面向特定工况的安全开发向面向真实事故的安全开发进行升级。
02、新增的乘员姿态和特征
可以想象自动驾驶汽车一定会增加乘员的坐姿变化(如朝后朝内的坐姿朝向、躺姿增加等)。因此, OSCCAR项目提倡未来的安全开发还需要同时考虑多样的乘员坐姿、碰撞前的乘员姿态变化和不同的乘员特征。在OSCCAR项目的另一份报告(Test Case Matrix and selecting Demonstrator Test Cases)展示了他们所考虑的乘员坐姿(图10~12)。
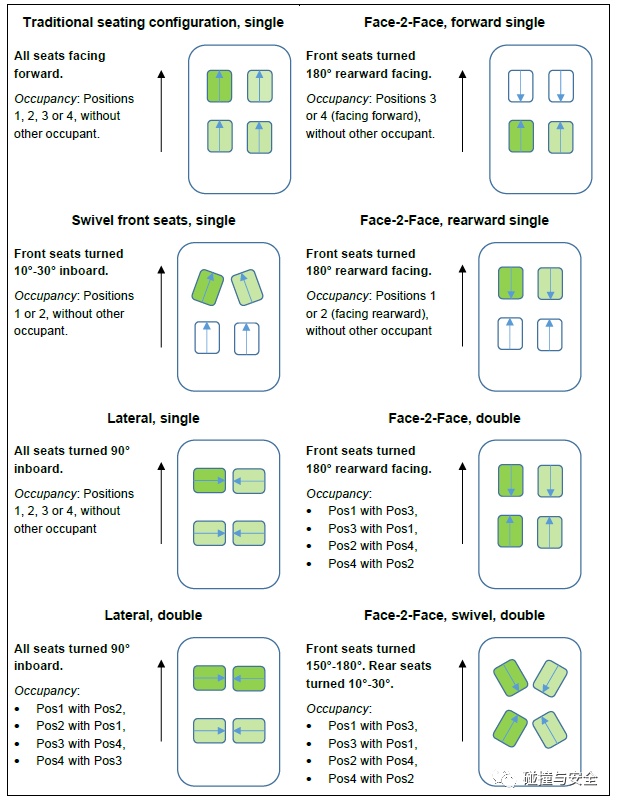
新增的座椅朝向
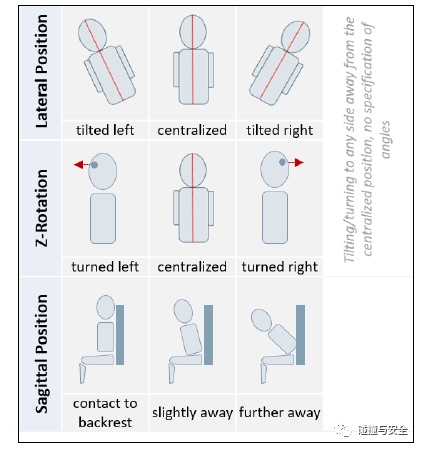
新增的上躯干姿态
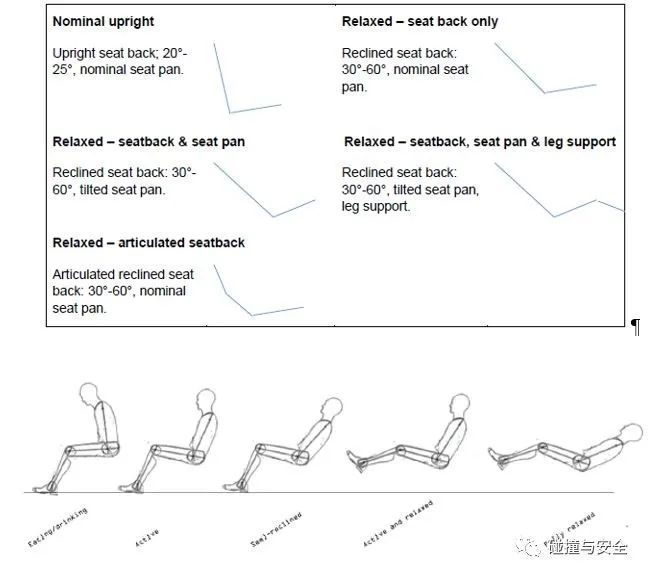
新增的座椅俯仰角和相应的乘员全身姿态
03、乘员安全开发面临的问题
美国NTSHA在面对自动驾驶影响下的车辆安全有着和欧盟OSCCAR相似的思路,但他们似乎更加务实,最近他们公布了三份关于自动驾驶乘员安全的报告中指出了三个问题。
一是尽管有统计表明某些情况下乘员离位会造成一些部位的伤害加大(图13),但现有的数据库没能在统计学上体现出乘员在位和离位对伤害的影响有显著差异。“离位乘员”的年龄比“在位乘员”小10岁,年龄差异造成的影响比姿态更大。
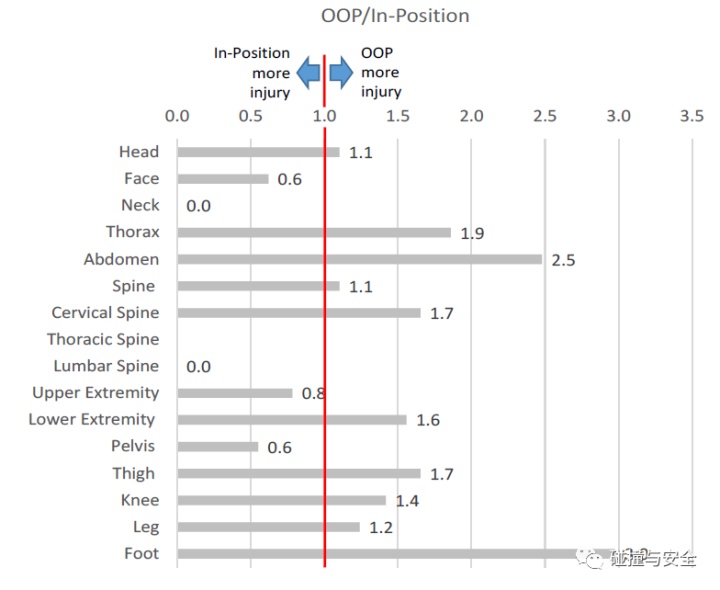
乘员离位和在位的伤害对比
二是现有的有限元假人的仿生性能仍需提高。图14展示了GHBMC-50-O和GHBMC-50-OS有限元假人在躺姿斜碰工况下各部位响应曲线与尸体假人的相似度评价。可以看到评价普遍不高。
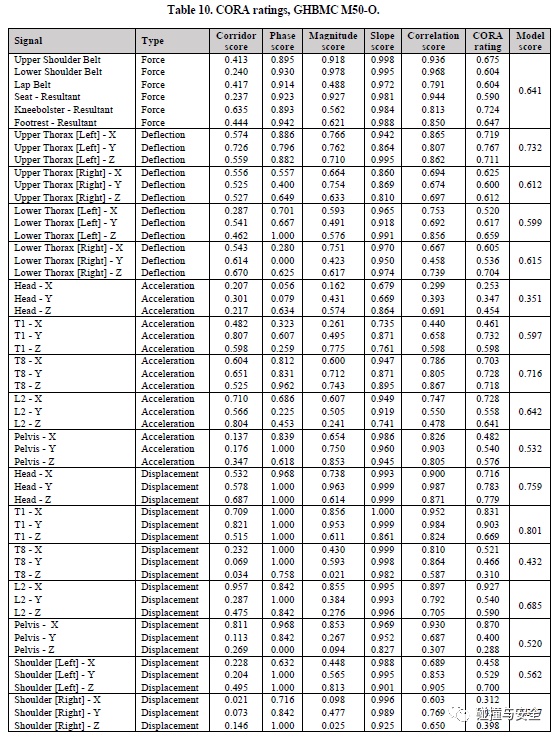
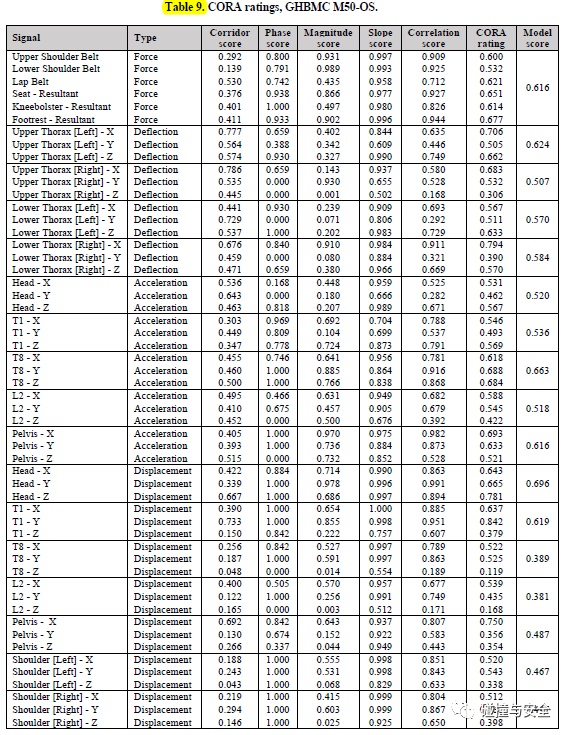
GHBMC-50-O和GHBMC-50-OS仿生特性评价
三是现有的有限元假人仍然存在许多工程计算问题需要解决。如单元负体积和干涉(图15)、姿态调整范围有限(图16)、关节刚度偏大等问题。

单元负体积和干涉
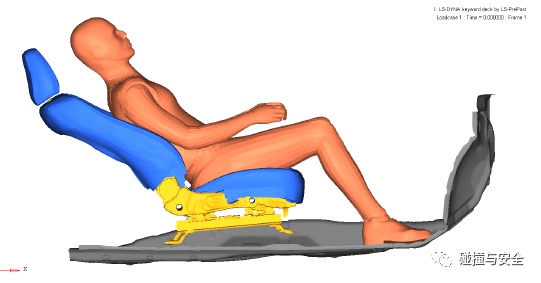
不能只靠重力作用躺平
从OSCCAR项目的路线图(图17)看,行业基本实现了2021年的目标:1、获得未来的碰撞场景;2、建立预碰撞阶段的仿真假人;3、仿真假人能够覆盖各种乘员特征;4、知道如何应用仿真假人进行虚拟评测。但面对2025年的目标:1、完善仿真假人和虚拟评测方法;2、对高级自动驾驶车辆的坐姿乘员达成统一的虚拟评测方法,并引入欧洲市场,行业前沿仍然有许多工作需要做。
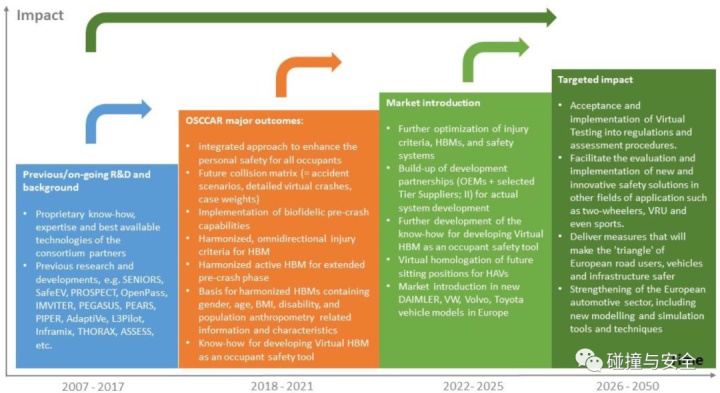
OSCCAR项目路线图
结语
若要按照OSCCAR项目的思路应对未来自动驾驶车辆的安全开发,我们需要等待行业前沿把有限元假人仿生特性和工程计算这些基础问题解决并且开放给主机厂使用后才能进行。但OSCCAR项目传递的行业趋势是清晰的:自动驾驶汽车的安全标准要比现有车辆更高,面向特定工况的安全开发需要向面向真实事故的安全开发进行升级。如果安全产品和安全性能够跳出了法规要求且适应市场需求,就可以提高市场对自动驾驶汽车的接受度,从而形成新的产品力。而从OSCCAR项目对未来碰撞场景的预测看,跳出法规要求并不意味着一定要超越法规要求(比如不要求50km/h全正碰变成60km/全正碰),而是适应更丰富更细化的碰撞场景。因此,结合自动驾驶带来的技术红利让被动安全产品更加“聪明”应该是个不错的方向。
文章:郑捷
编辑:郑捷
广汽研究院集成安全技术部







最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
