




 广告
广告





















































浅析自动驾驶一定离不开的高精地图
2022-01-24 20:26:28· 来源:智车科技

对于手机中的导航地图,大家一定都不陌生,几乎每天都会用到,无论去往哪一个陌生的地方,打开手机地图都能快速为你找到一条最方便、快捷的路。对于司机而言,导
对于手机中的导航地图,大家一定都不陌生,几乎每天都会用到,无论去往哪一个陌生的地方,打开手机地图都能快速为你找到一条最方便、快捷的路。对于司机而言,导航地图是至关重要的,而对于自动驾驶而言,简单的导航地图还无法满足其需求,需要增加很多额外的语义信息。由于输出直接给到自动驾驶算法中的决策规划模块,因此高精地图中需要包含详细的道路模型、车道模型、道路部件、道路属性等等。可以说有了高精地图的帮助,自动驾驶中的决策规划算法能够更加完整地了解周围的环境信息,并将主要精力放在应对周围的车流、人流上,掌握更多信息后做出更加合理、安全的决策。本篇文章就带领读者详细了解一下目前在自动驾驶中发挥至关重要作用的高精地图。
什么是高精地图
所谓高精度地图(也称为高精度地图),实际上是和普通导航电子地图相对而言的服务于自动驾驶系统的专题地图。高精地图也称自动驾驶地图、高分辨率地图,是面向自动驾驶汽车的一种新的地图数据范式。高精地图绝对位置精度接近1m 相对位置精度在厘米级别,能够达到10-20cm。
准确和全面地表征道路特征,并要求更高的实时性,是高精度地图最显著的特征。此外,高精地图记录驾驶行为的具体细节,包括典型驾驶行为、最佳加速点及刹车点、路况复杂程度、以及对不同路段信号接收情况的标注等。
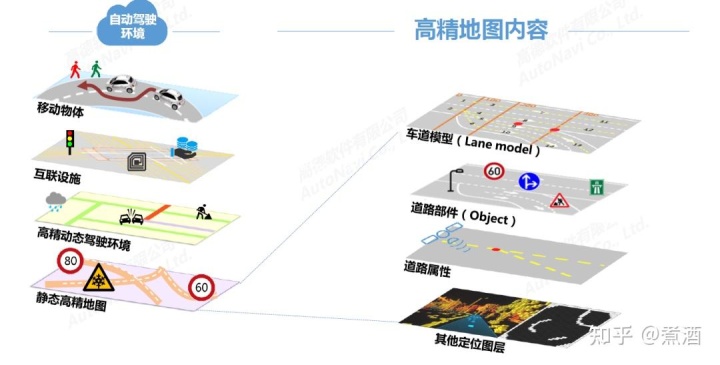
高精度地图可以分为两个层级:静态高精度地图和动态高精度地图。
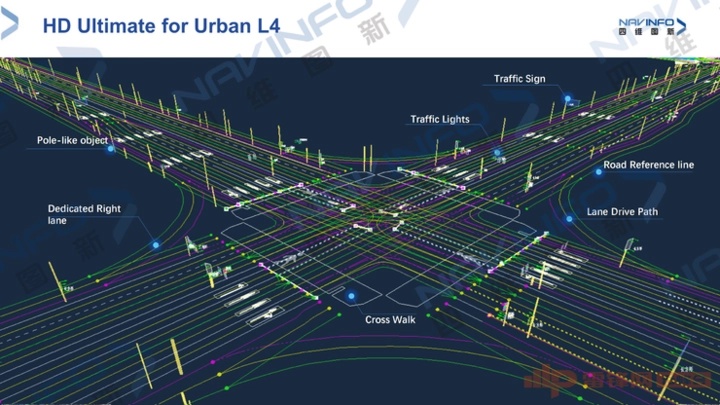
静态高精度地图处于底层,是目前研发的重点。它一般由含有语义信息的车道模型、道路部件(Object)、道路属性三类矢量信息,以及用于多传感器定位的特征(feature)图层构成。
动态高精度地图则建立于静态高精度地图的基础之上,它主要包括实时动态信息,既有其他交通参与者的信息(如道路拥堵情况、施工情况、是否有交通事故、交通管制情况、天气情况等),也有交通参与物的信息(如红绿灯、人行横道等)。
为什么高精地图在自动驾驶中不可或缺
高精度地图不仅高在其厘米级的量化程度,更高在其空间抽象层次,作为自动驾驶系统的重要组成部分,高精度地图相较于传统的导航电子地图,专注于自动驾驶场景,让自动驾驶车辆人性化地理解不断变化的现实环境,通过云端实时更新的多图层高精度地图数据,在自动驾驶车感知、定位、决策、规划等模块起到重要作用,是自动驾驶解决方案不可或缺的一环。
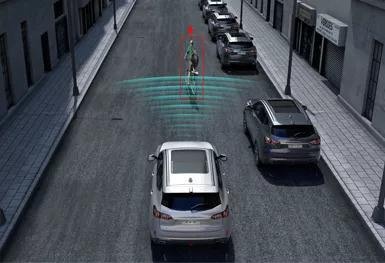
让我们想象一个典型的自动驾驶场景,假设我们正在驾驶一辆车行驶在道路中,而我们前方有辆自行车正在骑行,那么对于我们而言,可以有两个决策:跟车或者变道。对于自动驾驶车辆来说, 它做出变道决策需要知道很多具体的信息:
-
我们当前在哪条车道上以及当前车道在地图中的具体位置
-
当前车道是否有隔壁车道,如果没有车道也就无法变道,只能采取本车道避障
-
当前车道是否允许变道,车道的类型,车道线是虚线还是实线,变道距离是否足够长,变道后是否能够达到终点等
可以看出,以上这些信息对于自动驾驶车辆来说至关重要,而自动驾驶的感知算法由于感知范围、算力等等原因,无法给出如此精确及丰富的场景信息,如此情况下,高精地图就发挥出了其不可替代的作用。
高精地图的制作流程
讲完了高精地图的作用,接下来我们深入了解一下关于高精地图是如何制作的。一般来说,高精地图的制作分为以下几个步骤:
-
数据收集,地图信息的采集。
-
数据清洗/聚合。
-
自动化识别,把地图里的必要信息处理出来,包括车道线、红绿灯、十字路口等等各种信息。
-
人工检查/标注,现有的算法还做不到 100%的自动抽取,所以仍会加入人工检查和标注的环节。
-
后处理和验证,整个数据出来之后,还需要进行后处理和验证。处理的最终目的是保证提供的地图信息是准确的,假设一个红绿灯位置标错了或者自动识别错了,那可能会导致路测过程中出现安全隐患,所以验证环节是很重要的部分。
-
Release(发布),验证通过后,将会进行数据的发布(Data Release),所有数据会纳入统一的管理中,每一版本 Release 的地图的质量已得到严格验证。这是一个常规的发布流程。
高精地图的未来挑战
讲完了高精地图的优势与必要性,接下来就让我们看看高精地图如果真正应用在自动驾驶中,未来所会遇到的挑战及落地难点。
首先便是成本问题,高精地图所需要具备厘米级别的精度,这也就必须图商在采集制作高精地图时,数据采集车或人需要配备各类传感器(LiDAR、Cameras、GNSS/IMU),下图便是苹果的地图采集车,大家可以看到上面装了很多传感器,显然制造这样一辆专为制作高精地图的车辆成本不低。

其次便是数据量的存储问题。高精地图包含了大量的数据,这些数据如何存储,存储后如何方便地分块化使用,对于计算资源的消耗也是待解决的难点之一。这些问题能够找到有效方法进行解决才能推动高精地图在自动驾驶车辆上的大量部署。
最后便是高精地图的更新,与普通地图的更新频率不一样,高精地图中由于包含了大量的空间、时间及语义信息,更新的频率需要大幅度缩短,否则错误的信息对于无人车来说将是致命的。当然达到非常频繁的更新频率在现实生活中也是不太现实的,这方面还需要感知算法及算力的提升来对高精地图的更新频率问题进行冗余备份。

高精地图必然是未来自动驾驶能否真正落地的关键,虽然当前有许多问题及挑战亟待解决,但相信随着技术的成熟,未来高精地图将会在我们的自动驾驶日常出行中发挥举足轻重的作用。
参考资料:
[1] https://zhuanlan.zhihu.com/p/369092214



编辑推荐




最新资讯
-
余承东不再担任华为车BU董事长
2025-04-05 09:46
-
无稀土!里卡多开发铝电机
2025-04-05 09:46
-
康明斯宣布推出新的电池储能解决方案
2025-04-05 09:45
-
中汽中心工程院能量流测试设备上线全新专家
2025-04-03 08:46
-
上新|AutoHawk Extreme 横空出世-新一代实
2025-04-03 08:42
