




 广告
广告





















































采用结构化有限差分重叠网格模拟 DrivAer
2022-01-28 21:11:50· 来源:AutoAero

摘要:目前,大多数基于Navier-Stokes方程的计算流体动力学求解方法严重依赖于非结构有限体积离散化。广泛使用的有限体积解算器只能达到二阶空间精度,而结构有
摘要:
目前,大多数基于Navier-Stokes方程的计算流体动力学求解方法严重依赖于非结构有限体积离散化。广泛使用的有限体积解算器只能达到二阶空间精度,而结构有限差分码可以轻松地解决多达五阶的空间离散化问题。为了解决复杂几何结构的流动问题,采用了非结构有限体积算法,避免了手工构造复杂几何结构网格的繁琐和耗时。通过使用overset网格和NASA的overset网格求解器Overflow,结构化的有限差分解可以用于复杂的几何形状,如DrivAer[1]模型。与传统的有限体积格式相比,这允许捕获更高阶的流动结构。本文将有限体积法和有限差分法计算的流场解与DrivAer模型的实验结果进行了比较。
1.几何
在这个模拟中,DrivAer快背模型采用具有光滑地板和后视镜,此外,为了简化模型,去除车轮、轮胎形状并用两个平圆封闭。
2.嵌合体网格工具
Chimera网格方法最早由Steger等人在1983年提出,用于在飞机等复杂几何结构上采用有限差分格式,它提供了一个包含各种工具的软件包来创建重叠网格。
3.Overflow
Overflow是一种三维隐式Navier-Stokes流求解器,适用于结构化单网格和翻转网格。可以为单个网格选择计算选项,允许用户优化数值方案。例如,网格可以选择使用壁函数、薄层、全粘性、层流或无粘性。通常的做法是将离体网格进行层流,以减少计算机使用时间。全范围的代数,一个方程,两个方程,和DES湍流模型是可用的。波音公司在设计周期中广泛使用Overflow,包括产品开发和设计优化,以补充风洞和飞行测试结果。NASA在航天飞机项目中广泛使用Overflow,从20世纪80年代只有30万个点的网格发展到超过1亿个点。它在哥伦比亚号事故后被用于支持返回航班之前的重新设计工作。将五阶空间精度格式成功地应用于直升机尾迹相互作用关键叶片结构动力学和声学问题的建模。高阶精度与自适应网格精细化相结合是直升机旋翼尾迹复杂相互作用建模的关键。并将其应用于实际直升机高速向前飞行时远场声学的直接计算。Overflow的另一个优点是,它使用MPI和OpenMP完全并行化,并且可以在任意数量的处理器上运行。
4. 数值设置
4.1计算域
将滑移壁条件应用于包括地面和轮胎接触面在内的所有区域。入口采用自由流条件,出口采用外推的出口。由于车辆y=0轴的几何形状是对称的,为了提高计算时间,采用半车的形式进行仿真。计算域入口距车头6倍轮距长,计算域宽度7.7倍轮距,高度7.7倍轮距,总长17.25倍轮距,测试段的堵塞率为0.25%。
4.2面网格
使用ANSA从原始CAD文件创建了包面,并用三角网格进行面网格划分。在这里使用适当的网格分辨率和结构来保持表面曲率是很重要的。非结构化DrivAer前端参考面的一个例子如图1所示。非结构化曲面以mesh.tri文件的形式引入,然后使用SEAMCR工具在Chimera网格工具中提取边界曲线。构造这些边界曲线以隔离机体的重要表面,如窗边、顶边、筋膜边等。用曲线将一个区域四面包围起来,并使用Chimera网格工具中的SRAP在相对的两边设置用户指定增长率的等量点。然后在SURGRD实用程序中使用曲线来创建一个结构化的表面网格,并将其投影到参考的.tri文件中。结构曲线和投影曲面的一个例子如图2所示。在创建了结构化的表面网格之后,Chimera网格工具工具SRAP可以再次使用,不仅可以调整表面上的顶点数量,而且还可以在每个方向上以非各向同性的方式双曲增长网格。任何突出的边缘或特征作为其自身的表面,这样各向异性网格间距可以用来有效地表示表面曲率下降到0.1 mm。最终的结构化DrivAer表面被分解为176个独立的重叠曲面,由图3可见。半车的最终表面顶点数约为110万个。图4显示了前脸上最终翻转表面的详细视图。
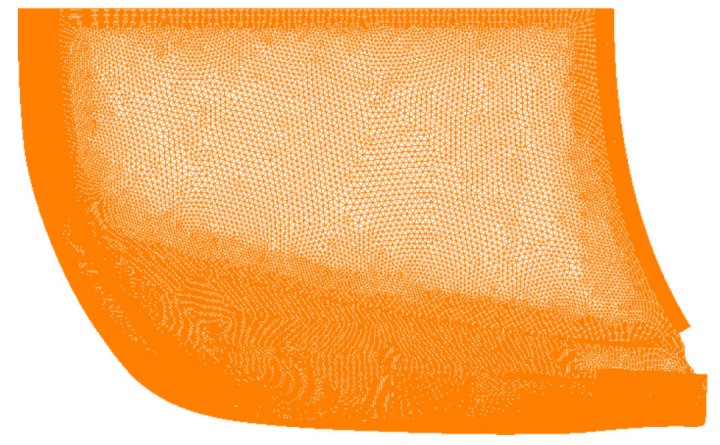
图1 ANSA生成的非结构化、防水三角形包面
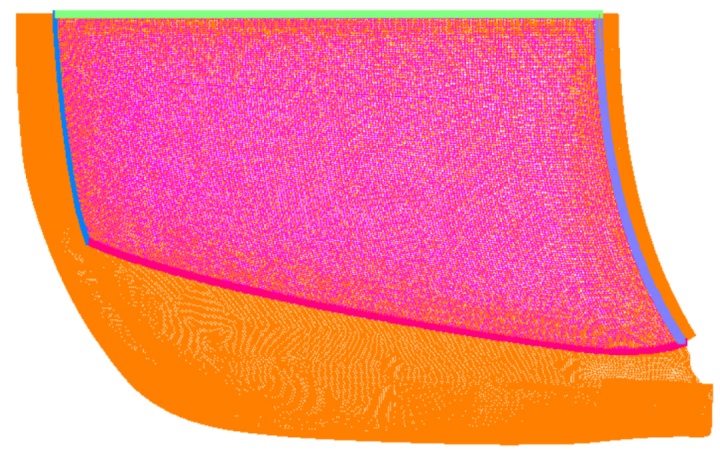
图2 结构化曲线和生成的曲面网格投影到DrivAer引擎盖的非结构化三角形曲面网格上
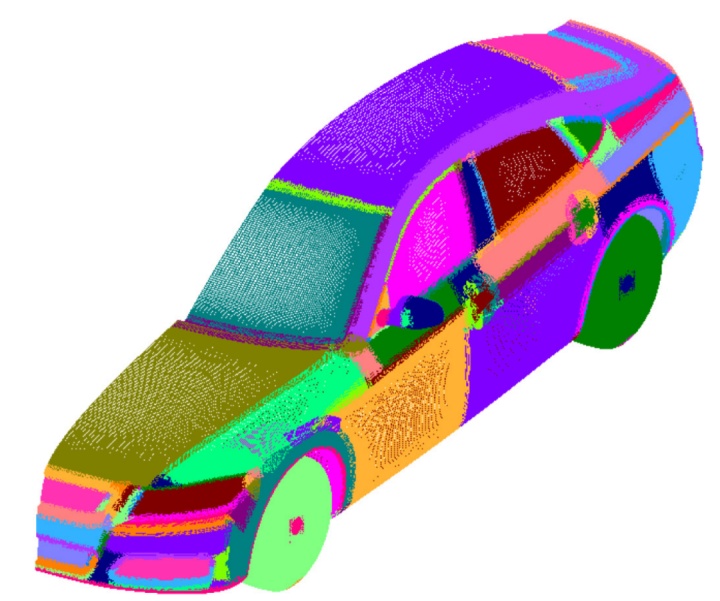
图3 最后的重叠面网格
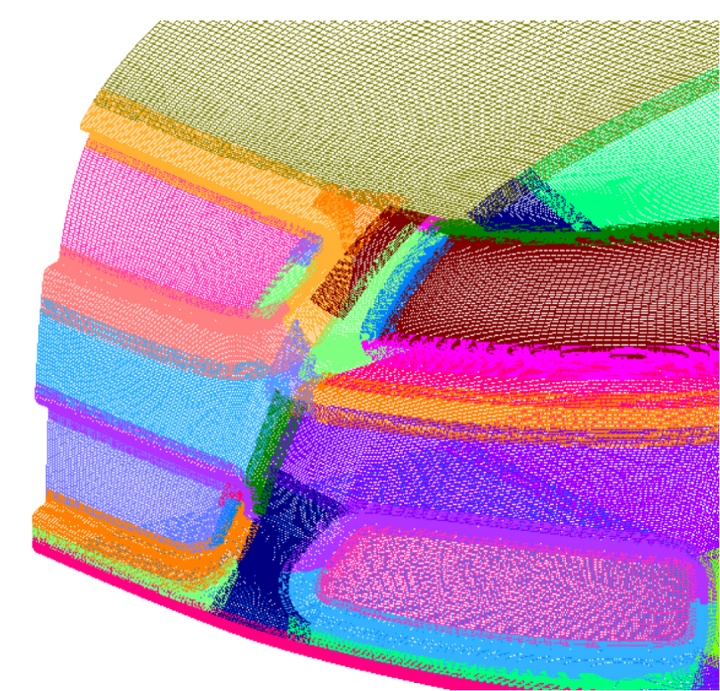
图4 最后的结构重叠表面网格在前筋膜
4.3体网格
为了保持y+值小于1,使用了0.01 mm的第一节点距离。为了提高蒙皮摩擦预测的精度,前4个节点的增长率为1;为了改善重叠,最后四个节点的增长率也为1。在靠近模型的边界层网格中,除上述节点外,指定增长速率为1.2。近体网格距体偏移0.1 m,以近似匹配离体细胞间距。创建了一个脚本来自动为每个网格生成卷网格。大多数网格可以用相同的输入创建。其余的网格需要定制平滑值,以保持正的雅可比矩阵和足够的重叠以进行网格通信。对于如图5所示的例子,引擎盖和挡风玻璃网格是自动生成的。橙色的网格需要额外的平滑来保持网格的质量。车辆周围是一个间隔为0.005米的均匀笛卡儿盒子。在所有方向上具有两倍网格间距的第二笛卡尔盒围绕第一盒,并延伸到墙壁、进口和出口边界。
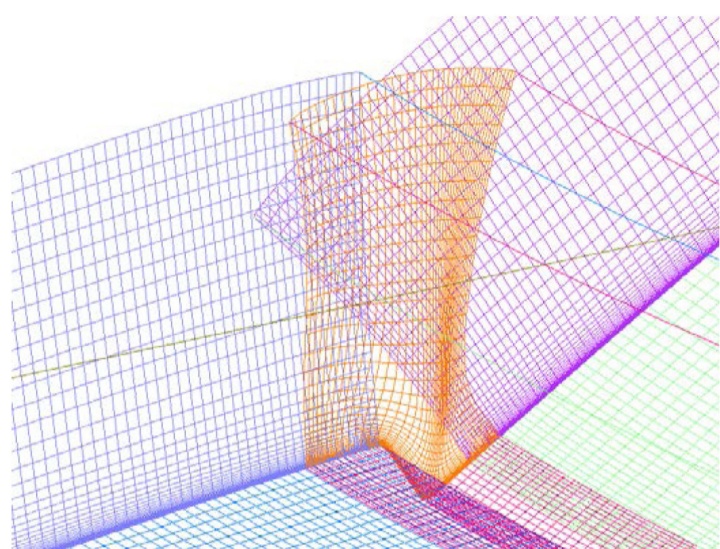
图5 遮阳罩和挡风玻璃之间的网格示意
4.4车轮
由于轮胎接触区几何形状的复杂性,在接触区附近的任何CFD模拟都应该进行特殊处理。对于接触面上的网格,为了正确地模拟流动,必须采取几个步骤。
在此模拟中,轮胎接触块通过创建圆形接触块网格进行网格划分。该网格在接触网格上有两个任务:一是定义垂直接触网格的边界,二是创建足够的重叠,使网格消隐后,接触网格与周围环境之间有足够的边缘点。图6显示了轮胎接触贴片的侧视图,红色圆形接触贴片网格定义了在网格下去除地面以下和接触贴片环内的轮胎(棕色)后,接触贴片的形状(图7)。
为了模拟轮胎的旋转,对轮胎的边界条件编写了自定义的边界条件。对轮胎施加一个旋转壁面速度,然后外推压力和密度。
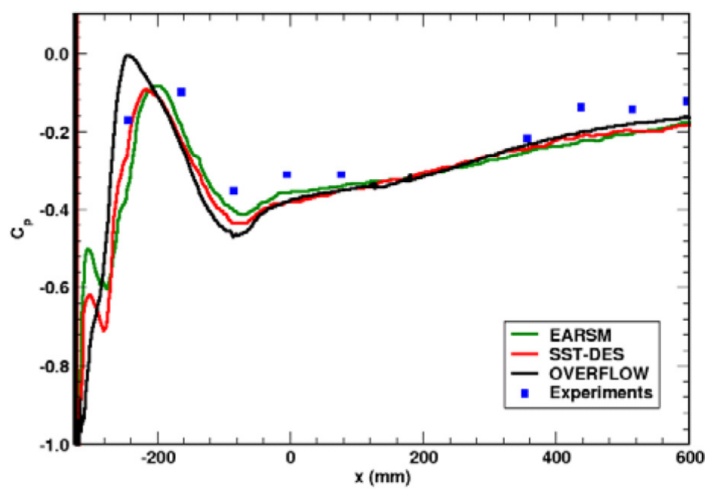
图6 圆形接触贴片网格侧视图(红色)

图7 轮胎接触环面
4.5域连接
在Overflow中有两种方法用于域连接。第一个是显式孔切割,用于在Overflow[12]内模拟非定常运动的旋翼叶片。用户提供表面,然后使用x射线进行映射。这些曲面由求解器存储,并可以通过提供的运动或6DOF运动来移动。第二种方法,隐式孔洞切割,使用外部代码PEGASUS。PEGASUS可以生成网格连接信息,而不需要用户提供多少信息。在这项工作中采用了显性和隐性的方法。这些域连接性方法首先确定需要删除的网格区域。流动求解器不会在空白的网格点上计算解。当使用x射线时,从这些表面的偏移被显式设置为用户输入,或者在使用隐式孔切割时自动计算。在每个网格或空白区域的边界上,需要插值模板。最多三个边缘点用于插值模板,以允许数值格式在网格边界上保持5阶。图8显示了在离体网格中切割的孔的示例。第一个盒子(橙色)在距离驾驶员表面0.06米的设定距离处被打黑。外框(蓝色)然后在内框区域内消隐。整个网格由6700万个点组成,其中有810万个插值边缘点和620万个空白点。然后使用流量求解器来计算剩下的5300万个点。
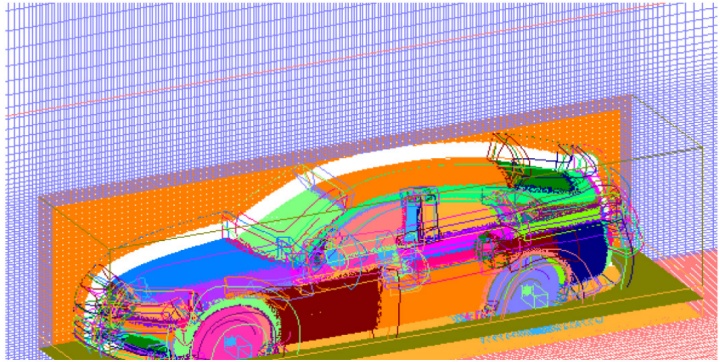
图8 在离体网格上的孔切割
4.6计算设置
为了无量纲化模拟模拟,以车辆轴距L=1.1172m为基础扩展网格。基于车辆长度,雷诺数为5.05×106,自由流速度40m/s,干燥空气为20℃。用于力系数计算的车辆正面面积为0.3457m2,所得系数翻倍以适应半车模拟。
为了加快收敛速度,计算开始使用网格排序。第一个一千步是在每8个点上跑一次,下一个一千步是在每4个点上跑一次,在每一个方向上每另外一个点跑一千步。模拟用了5000个全分辨率步骤完成。模拟过程采用非时间精确的方法,并根据本地CFL数值进行步长计算。低马赫数预处理采用了五阶Roe迎风方案,ARC3D对角线化射束升温标量五对角线在左侧。采用全粘性湍流模型对整个区域进行了数值模拟。
4.7力的计算
由于重叠网格的特性,有时会有多个顶点占据同一空间。为了避免在整合过程中重复计算车身部位,使用MIXSUR缝合单个表面。在运行模拟时,OVERINT实用程序被用来计算力系数和力矩在任何用户指定的表面和或组件。
5.结果
代表阻力和升力的总力系数由Heft等人[1]根据Guilmineau等人[9]的实验和数值结果给出。此外,Guilmineau等人的提供了后玻璃沿跨度的压力分布,可以很容易地与本文的当前结果进行比较。实验中心线压力系数分布由Heft 等人得到,与当前Overflow结果和Guilmineau等人数值结果对比如下:值得注意的是,Guilmineau等他使用的是EARSM湍流模型。
对比图9中的实验结果和数值结果,在罩前逆压区,Overflow结果相对于有限体积结果有轻微的改善。在前挡板唇处负Cp初始超调后,Overflow结果恢复压力的速度要快于在-280mm(引擎罩前端)到160mm(罩口)范围内有限体积的结果。在480mm(顶棚开始处),Overflow计算结果与有限体积预测结果相比,与实验结果具有更好的相关性;然而,这一区域的预测Cp几乎是实验的0.25。这是一个需要进一步研究的项目。造成这种差异的一个潜在原因可能是由于在实验中出现的CFD模拟中没有顶板推力杆,这将在顶板中心线上产生正压力。另一个潜在的原因可能是由于制造的驱动器在窗口到屋顶过渡与提供的CAD不相同。如果造成这种差异的这些假设原因都不成立,那么就需要对这种流状态进行认真的关注。
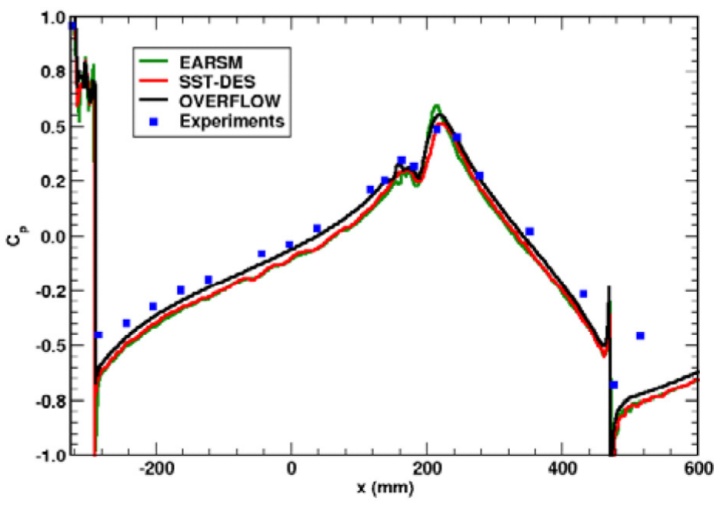
图9 中心线压力系数Z>0为车辆的前部部分
在图10后侧玻璃区域的后侧中心线Cp分布上,我们可以看到车顶Cp被大大低估了。对于有限体积的结果也是如此,但是Overflow的结果在这个区域更接近实验结果。从后玻璃开始(1150mm)到后备箱盖开始(1400mm),可以认为是一个逆压梯度区。
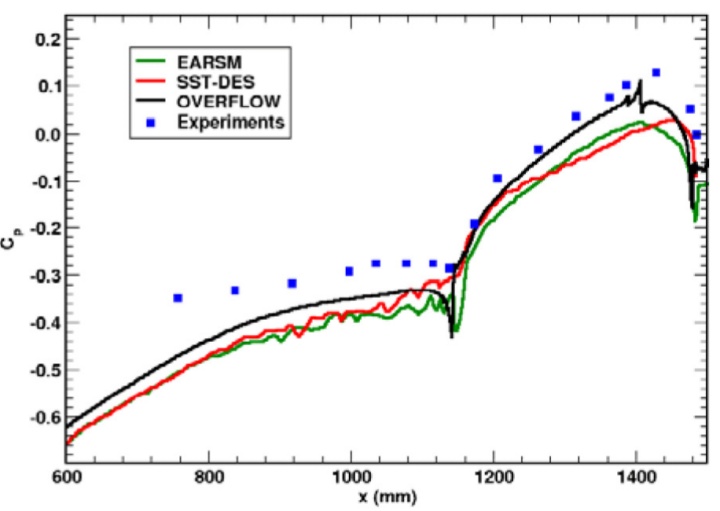
图10中心线压力系数Z>0为车辆后部部分
关于Cp分布需要注意的另一项是,在每次几何改变时,Overflow结果显示在尖锐的边界或边缘上高阶方案可能出现的更大的不连续点。
图11、图12为车辆底部中线Cp。在车辆前部,Overflow的结果与前两个实验数据点一致,但对前轮中心线(0mm)附近的压力预测不足。在接近车辆尾部时,如图11所示,Overflow结果开始比有限体积结果恢复得更快。
图11 车辆前部中线压力系数Z<0
图12 车辆后部的中心线压力系数Z<0
在地板的最后一部分,如图12所示,所有三个结果都低估了实验压力。然而,Guilmineau的DES结果匹配后保险杠之前的最后一个数据点比两个RANS模拟更好。
与图11和图12中车轮中心线以下的实验相比,所有数值模拟的偏置都引起了人们对进入滚动路面的边界层廓线和在实验测量期间的驾驶员驾驶高度的关注。此外,实验在8%的堵塞率下进行,没有压力修正,而模拟的堵塞率为0.25%。
5.1跨度压力分布
除图9外,图13、图14和图15分别提供了Y/L跨度为0.05、0.10和0.125的Cp图。这些地块允许比较Overflow和有限体积的结果,从屋顶后部和后面的玻璃。
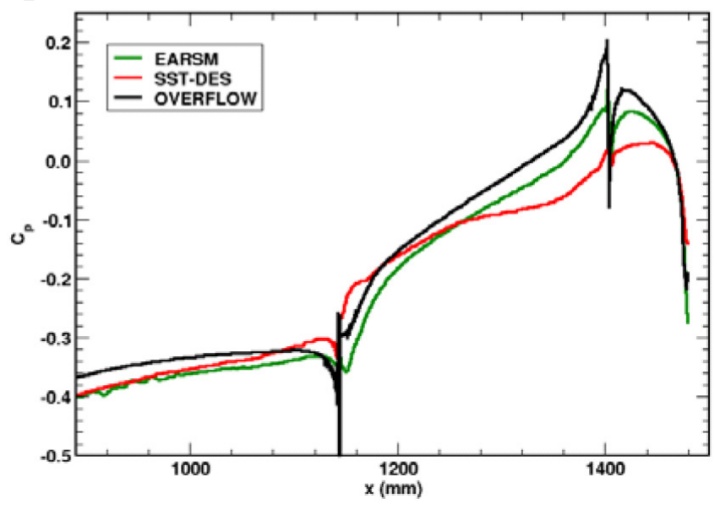
图13 Y/L = 0.05时Z>0的压力系数
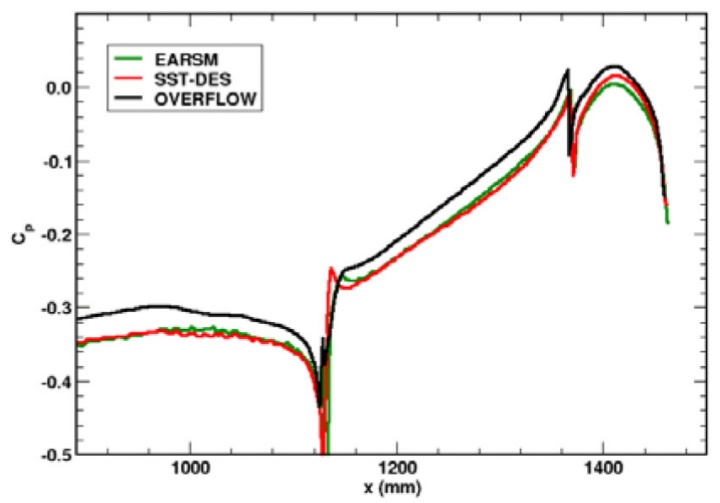
图14 Y/L = 0.100时Z>0的压力系数
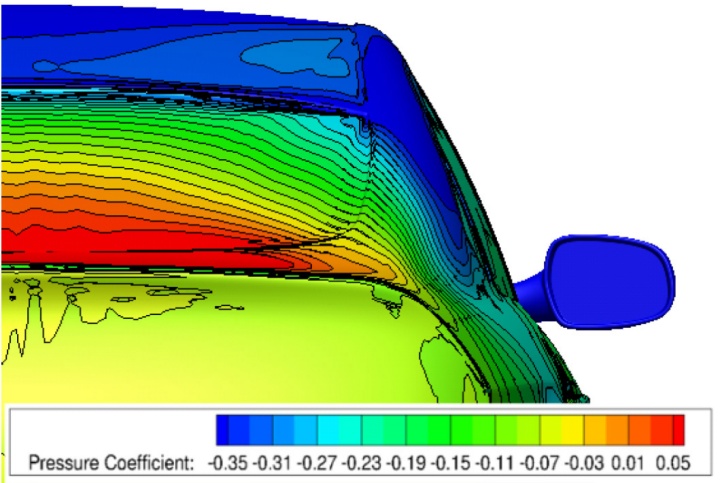
图15 Y/L = 0.125时Z>0的压力系数
Overflow结果的Cp值在从880mm到车辆后部的所有跨度位置上都高于有限体积结果。
5.2表面压力系数分布
图16、图17、图18提供了整个表面Cp分布。图16可以直接与Heft的实验前后窗压力分布进行比较,结果非常吻合,特别是在后窗中心线以下。最低的压力系数发生在a柱,侧镜和前轮胎周围。
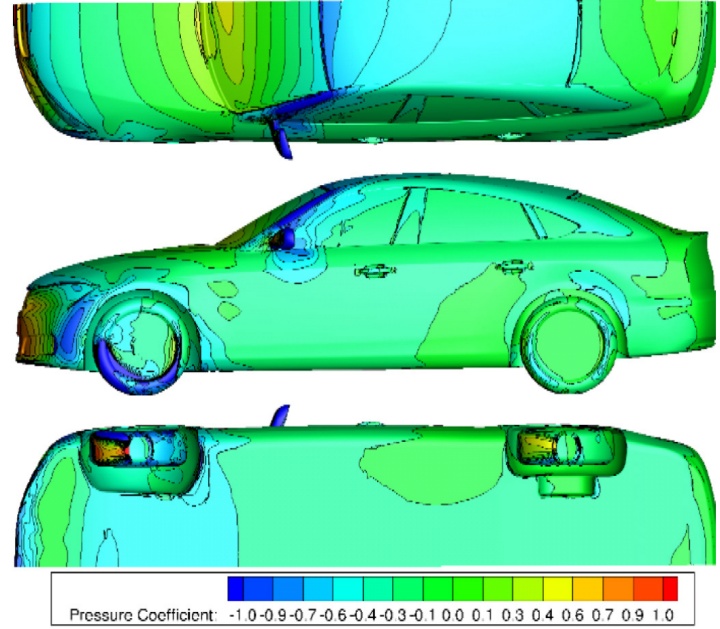
图16 车辆顶部、侧面和底部的压力系数分布
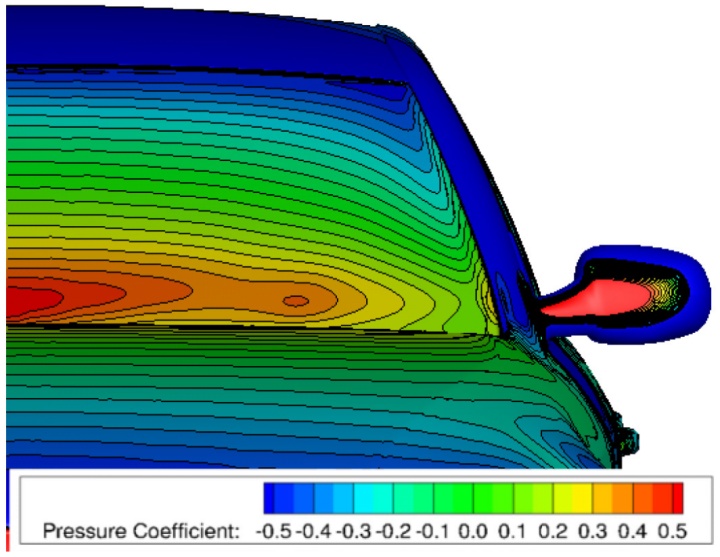
图17 前玻璃的压力系数
图18 后玻璃的压力系数
5.3气流结构
为了更深入地了解流场,在流场的对称平面上计算了平面有界流线。图19显示了两个反向旋转的涡和一个鞍点附近的X/L为1。注意,坐标系统位于前轴。这两个反向旋转涡的存在支持了Strangfeld等人的研究。此外,流线表明一个分离的后玻璃与再附着附近的后备箱盖。图20中,将溢流壁面边界流线结果与Wieser等人给出的油流可视化结果进行比较,支持了后玻璃上的分离。然而,中心平面的两个反向旋转涡只在Guilmineau的[9]自适应网格细化mesh2 + EARSM解决方案中可见。

图19 车辆后部的中间流线
虽然Wieser和Strangfeld的雷诺数与目前的模拟雷诺数5.05×106相比仅为3.2×106,但数量级仍然相同。Strangfeld的研究表明,总体阻力系数在雷诺数2.5×106时趋于平稳,但甲板盖末端的压力仍在变化。
图20中的车辆表面(左)是用第二个节点速度的大小着色的,而墙界流线是根据第二个节点速度分量简单计算出来的。图20中的实验油流(右)由Wieser etal.给出。注意,第一个节点在壁上,因此,这里的速度为零。后玻璃上的明显分离是由图20中的Overflow解决方案所示的较低的第二节点速度所支持的。在实验和CFD中,其他共同的特征是后玻璃中心线底部附近的旋转,后玻璃顶部的分离,以及由于A-post涡在车顶上的流动模式。由于翻转网格,在这一点上的墙边界流线没有在网格之间沟通,必须单独播种。这个通信问题可以在图20中看到,在后备箱盖的末端,流线箭头指向车辆中心线和网格的最大x位置。
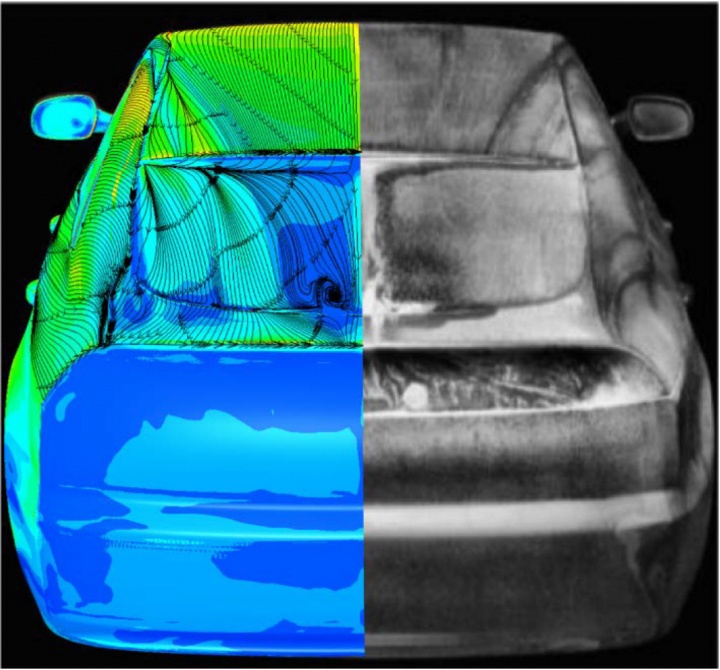
图20 与Wieser的实验结果相比(右),以秒为近壁速度量级着色的壁面边界流线(左)
关于A-post涡旋的更多信息见下图21。涡度大小等高线显示在屋顶边缘形成了一个简洁的涡,当切面向后移动时,可以看到涡的进程。当涡旋向后移动时,涡旋也接近飞行器的中心线,涡度轮廓也随之扩散。在图21中,涡度轮廓的附加特征也可见,如侧后视镜的尾流和前轮胎的涡。
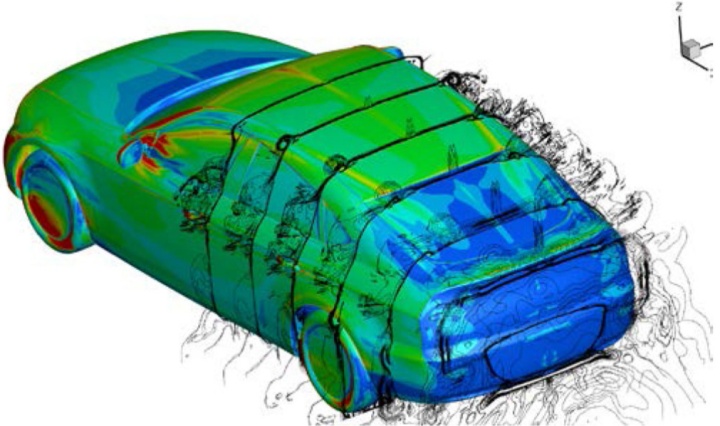
图21 壁面剪应力幅值和涡度幅值等值线切面图
5.4力系数
利用OVERINT算法计算了前轮轴的阻力系数和升力系数,以及前轮轴的俯仰力矩。虽然模拟是按平均时间运行的,但报告的系数是在最后1000次迭代中平均的。溢流力系数结果可与Heft实验和Guilmineau数值结果进行比较,见下表1。
表1 阻升系数比较
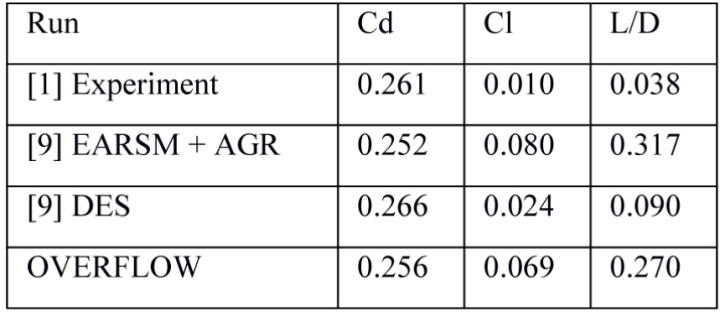
比较Overflow和Guilmineau的EARSM结果,无论是Cd还是Cl,Overflow的结果都更接近实验值。然而,DES结果是相当接近的溢出RANS Cl值,但也超过预测Cd值5counts。
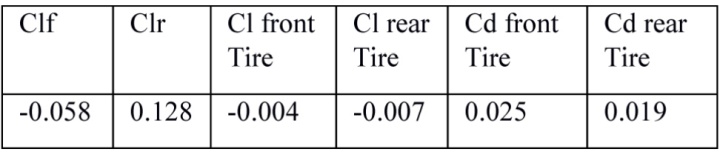
前(Clf)和后(Clr)分布在表2中报告,没有任何其他值可以比较,因此报告它们以供将来的开发。通过与图9、10、11、12中实验中心线压力分布的对比,我们预计下压力向前移动,整体升力减小。
表2 附加力系数结果
6.总结
给出了旋转轮胎下fastback DrivAer几何的五阶有限差分时均解,并与实验结果和有限体积结果进行了比较。虽然给出的结果是半车平均和时间平均的,但五阶有限差分格式显示了很好的结果,表明了进一步发展的必要性。通过简单地镜像当前的网格,可以将模型从半辆车改进为一辆完整的车。在计算过程中,结构化的覆盖网格也可以自由地在域上移动,允许一个网格有几个几何方向。此外,在创建了整个模型之后,切换部分几何体是非常简单和有效的。
正如预期的那样,Overflow的结果并没有完全复制Heft的实验。RANS的结果在这里提出,然而复制实验与以前的时间平均有限体积的结果具有更高的准确性。此外,Overflow提供了更快的计算时间,同时需要更少的计算机内存和存储,还考虑了可压缩流和5阶空间精度的计算。因此,结构有限差分重叠网格可能是汽车CFD有限体积代码的一个优雅的替代方案。
- 下一篇:电车试验:动力电池售后保养要求
- 上一篇:中汽研 | 电动汽车碰撞后电安全分析与研究



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
