




 广告
广告





















































车道模型验证示例
2022-02-07 22:39:05· 来源:智车科技

车道模型验证被认为是提供了一个关于如何作为可信度评估的一部分进行验证的实例。大多数横向支持系统(如车道保持辅助系统、车道对中系统、车道变更辅助系统等)
车道模型验证被认为是提供了一个关于如何作为可信度评估的一部分进行验证的实例。大多数横向支持系统(如车道保持辅助系统、车道对中系统、车道变更辅助系统等)使用的感知算法需要车道模型的精确表示。
为了证明车道模型适用于此目的,使用可信性评估定义的过程进行验证。在此过程中不考虑车辆动力学,因为底盘动力学对车道标记检测能力的影响可以忽略不计。该过程包括以下要素:
(a) 子系统-摄像机模型;
(b) 传感器系统–带有虚拟车道标记的摄像头模型;
(c) 集成系统-车道检测算法。
摄像机模型验证
仿真需要从正确位置(外部属性)为给定场景的所有摄像机提供精确的图像(内部属性)。验证过程中应考虑的特定内在摄像机相关现象包括:
(a) 透镜畸变:由于投影引起的光学像差;
(b) 渐晕:屏幕边框变暗;
(c) 颗粒抖动:白噪声注入;
(d) 光晕:明亮区域周围有流苏;
(e) 自动曝光:图像伽马适应较暗或较亮的区域;
(f) 镜头光斑:明亮物体在镜头上的反射;
(g) 景深:相机附近或很远的物体模糊;
(h) 曝光时间:快门打开持续时间。
以下是可用于支持相机模型验证的工具的非详尽列表。
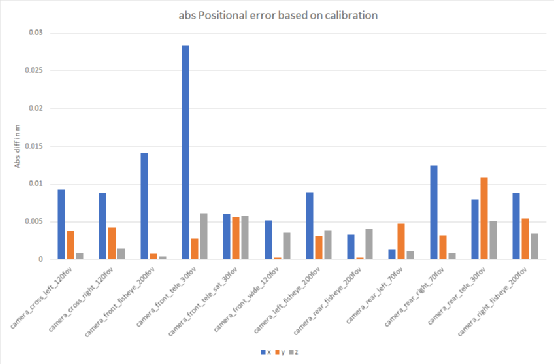
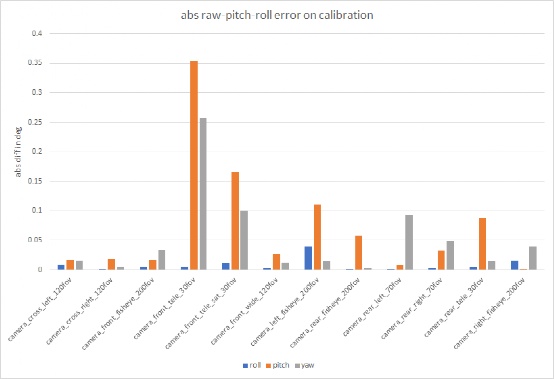
April标记(April Tag)是一种视觉基准系统,是支持外部相机相关属性验证的有用工具。标签提供了一种识别和三维定位的方法,即使在低能见度条件下也是如此。标签的作用类似于条形码,存储少量信息(标签ID),同时还可以对标签进行简单而准确的6D(x、y、z、滚动、俯仰、偏航)姿势估计。
摄像头前宽视场角120 fov:
摄像机-左-鱼眼- 200fov
April Tags标记图的位置和方向在场景中受到很好的约束,因为它们可以从多个摄像机中看到。阈值可以设置在由April标签的绝对位置/角度差异产生的误差上。
传感器系统验证
传感器系统验证的目的是证明摄像机模型能够在虚拟环境中提供准确的结果,测试系统将在虚拟环境中运行。预定义的KPI可用于确定虚拟传感器系统的性能。对于车道模型,车道标记和路面之间的对比度用于显示传感器系统在物理和虚拟环境中的性能。
作为一个例子,这里展示了一个将传感器性能划分为几个等效分类的简单框架。该方法依赖于有效划分对传感器性能指标(在这种情况下,车道标线和路面之间的亮度对比度)有重大影响的条件的等效分类。可以将性能实现与特定环境或场景特定条件相结合以形成一个需求类型。
可以考虑通用需求模式,如下所示:
如果{条件存在},则{KPI}应{大于}{KPI阈值}。
根据需要,可在不同条件下重复需求类型,以便:
1)完全覆盖所有外部条件,包括极端情况,
2)定义性能需求可能随条件变化的边界值,例如,如果下雪,放宽车道边界的假阳性检测率(false-positive detection rate)。如果该需求类型在所有可能的条件下都得到了很好的定义、独立验证,并且开发人员承诺满足需求,那么传感器性能中的“功能不足”问题很可能会减少或完全消除。
条件分类的划分方法遵循以下简单结构,例如:
(a) 第1类:标称条件-这些是理想的、最佳情况下的条件。
(b) 第2类:平均条件-与第1类条件相比,这些是可能需要大量开发工作的预期现实条件,例如内部四分位间距范围(inner quartile range)。
(c) 第3类:最差可接受条件-这些是保证一定性能水平的最差条件,例如95%范围。这些可能需要在所需的最低性能级别和剩余的开发工作之间进行权衡。除此等级外,无任何性能要求。(注意,这可以根据需要进行定制)
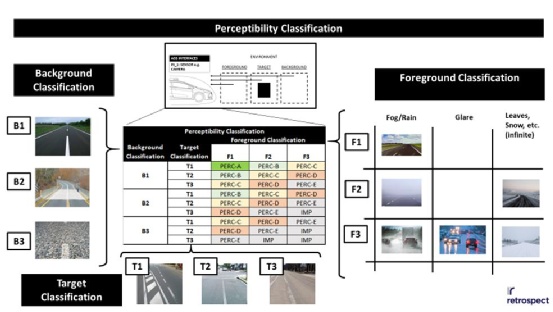
最后,可能需要根据相互之间的依赖性或独立性,将条件本身划分为参数,形成一个最小的参数集,该参数集充分捕捉环境和情景特定条件。对于迄今为止考虑的各种传感模式,包括:摄像机(可见光)、雷达、激光雷达、超声波和红外摄像机,以下通用传感器模型在分析所有传感模式的所有环境条件时具有可重复性和实用性。它被分解为三个不同的参数:前景、目标和背景。
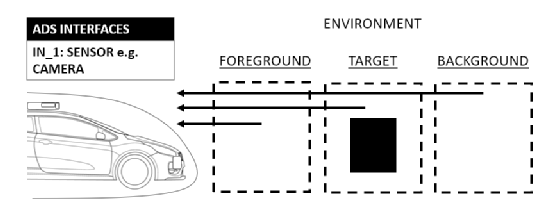
在基于摄像头的系统进行车道检测的示例中,本例中的“目标”是车道本身。可能需要开发许多属性以完全捕获目标的所有期望属性,例如颜色、位置、曲率、线段类型、锐度(或模糊度)等。在这种情况下,感兴趣的属性是车道相对于路面的对比度。路面将是传感模型中的“背景”。“前景”可以是传感器和目标之间的任何东西,如雾、雨或晴空以及碎片、物体、积雪等。
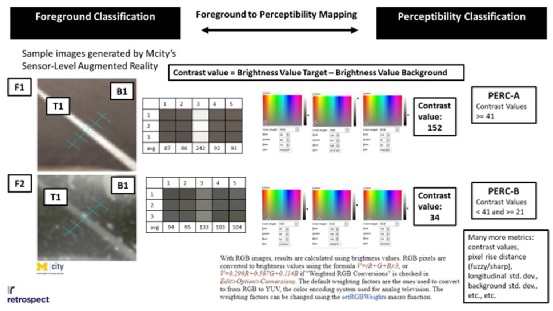
在下图中,来自传感器级增强现实演示的示例图像用于显示前景(在本例中为雪)如何改变车道(目标)相对于道路(背景)的对比度值。这突出了条件分类的有用性,因为它可以在环境条件的无限变化和组合与开发人员必须承诺交付的有限性能需求集之间提供一致的接口。
整体性能能力的内部或外部分类可能(或不一定)是有用的。对于车道模型,在此阶段应考虑每个参数及其相关变量范围(目标、前景和背景)。首先,应使用已知的KPI(如非常确定的静态场景)对传感器系统进行证明。这将允许根据可测量的KPI对系统进行验证。之后,它可以扩展到不同的天气条件等。然后可以建立一个考虑输入参数变化的测试矩阵。真实结果和仿真结果的巨大变化为工具可能存在局限性提供了证据。在评估期间应注意任何传感器性能限制,以限制可以生成哪些数据来支持ADS评估。
由于无法控制的环境条件而遇到性能限制,设计师可以将其降低到最低性能水平,如上所述,或者他们可以战略性地改变“目标”,以便检测环境条件。考虑到上面的降雪示例,在小雪条件下,“目标”可能是车道本身。但是,在大雪条件下,“目标”可能是大雪本身,也就是说,车道检测摄像头必须检测到大雪。
由设计人员确定什么对整个系统目标和给定的技术能力有用,但传感器系统验证方法的目的是展示设计人员和测试人员如何在其开发合同中充分满足规定性能和安全要求,并出示履行合同的证据。与开发后期才发现它们无法达到预期性能相比,这种做法可以降低风险。即使发生这种情况,最简单的解决方案可能只是重新协商性能级别,并将其传达给所有利益相关者。最大的风险来源可能是最开始未能定义需求,并计划对传感器性能采取“观望(wait and see)”的方法。
综合系统验证
最后,对整个集成系统进行了测试。这包括带有集成感知算法的传感器系统。仿真数据和真实数据从同一环境中收集并同步。然后,可以对状态变化感知算法进行比较,以检查仿真结果是否与实际性能相符。相关阈值将确定车道检测算法是否用于支持:LDW、LKAS或ADS。
在证明车道模型足够准确后,虚拟测试工具可用于支持车道检测算法的评估。虚拟测试可用于显著加快验证过程,并提供足够的证据证明系统在整个过程中按预期工作。一旦实现了模型和工具链的基线关联,虚拟测试工具可用于验证大范围的行为,并确认对意外情况的安全响应。通过应用不同输入的变化和随机化,系统响应将在广泛的场景和刺激中进行测试,并收集对其性能的更多信心。置信度可以通过覆盖度量(基于输入数据和/或ODD范围测量)来反映,其中测量的覆盖度越高,系统性能的置信度越高,因为它是在更广泛的情况下进行测试的。

参考资料:Proposal for NATM



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
