




 广告
广告





















































迈锐宝XL行星排齿轮测绘及工作原理分析
2022-02-08 12:57:50· 来源:汽车动力总成

01、概述说起混动,人们首先想到的是丰田Prius,其实还有一位优等生——通用Volt,沃蓝达变速箱共迭代了两次,在通用内部第一代命名为4ET50,第二代命名为5ET50
01、概述
说起混动,人们首先想到的是丰田Prius,其实还有一位优等生——通用Volt,沃蓝达变速箱共迭代了两次,在通用内部第一代命名为4ET50,第二代命名为5ET50。
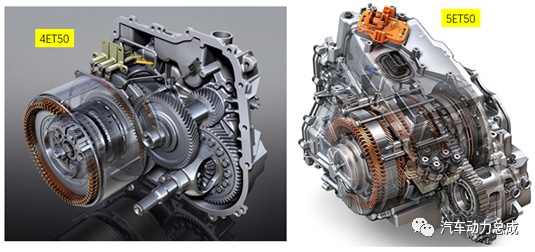
图1 Volt第一代和第二代DHT
关注混动发展,了解这段历史的人们都知道,丰田于1995年在东京车展上推出第一代Prius,并于1996年提出THS-Ⅰ的专利,1997年Prius正式上市。同样,通用在混动上的研究也不差。几乎和丰田THS同步,通用于1995年即提出自己的功率分流方案专利申请,2001年Volt-Ⅱ的方案就已经成型,2007年底特律车展上Volt-Ⅰ揭开面纱,2010年11月Volt-Ⅰ在北美上市,2016年10月Volt-Ⅱ正式推出。5ET50分别搭载于凯迪拉克CT6、别克君越和迈锐宝XL上面,本文的齿轮测绘即基于混动版迈锐宝XL行星排开展,并分析其工作原理。
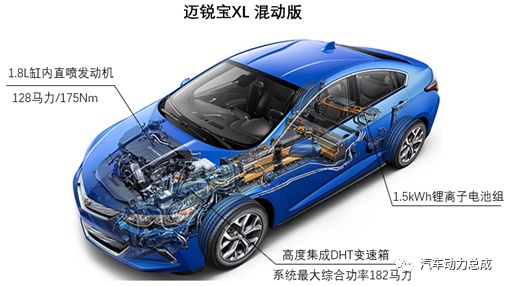
图2 迈锐宝XL 混动版
Volt-Ⅱ的特点是双电机系统,采用两个简单行星排的组合,有一个制动器、一个离合器、一个多模离合器。可实现两种纯电模式,一个输入动力分流模式(ECVT1),一个固定速比模式,一个复合动力分流模式(ECVT2)。功率分流模式高效运行兼顾了经济性,固定传动比模式大扭矩输出兼顾了动力性,0-100kph加速时间为8.8s,百公里油耗为4.3L,其动力系统参数见下表。
表1 迈锐宝动力系统性能参数

02、行星排齿轮测绘
迈锐宝XL混动系统DHT的剖视面图如下

图3 5ET50剖面图
为了阐述方便同时为了避免混淆,对5ET50行星排进行编号命名,见如下结构简图
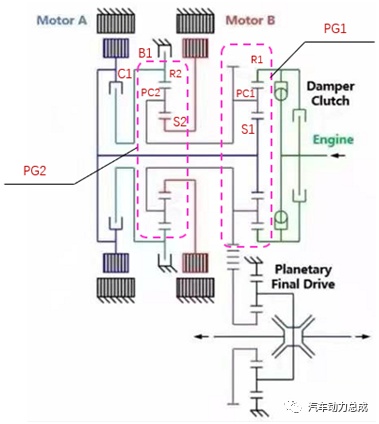
图4 结构简图
限于篇幅,这里直接给出测绘和计算的结果,略去繁琐的测量和计算过程,具体参见表2和表3
表2 PG1齿轮参数测绘表


PG1太阳轮、行星轮和齿圈测绘齿形同实物对比见图5、6、7

图5 PG1太阳轮测绘齿形和实物对比


图7 PG1大齿圈测绘齿形和实物对比
表3 PG2齿轮参数测绘表


PG2太阳轮、行星轮和齿圈测绘齿形同实物对比见图8、9、10
图8 PG2太阳轮测绘齿形和实物对比
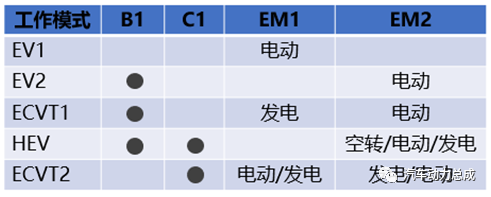
图9 PG2行星轮测绘齿形和实物对比

图10 PG2内齿圈测绘齿形和实物对比
03、工作模式分析
观察图4,迈锐宝XL混动箱的连接方式是发动机ICE动力经过扭转减振器后和PG1的齿圈R1相连,S1连接辅助电机MotorA,PC1和PC2共轴并通过链条传动将动力输出到和差速器相连的行星排,S2连接驱动电机MotorB,PG2的内齿圈R2可以通过制动器B1固连到壳体,同时R2又通过离合器C1实现和PG1的太阳轮S1相连。
除驻车充电、能量回收外,该箱共有5种常用的工作模式,其中两种纯电动模式,分别定义为EV1和EV2,EV1是辅助电机A驱动,EV2为驱动电机B驱动。迈锐宝DHT取消了单向离合器,因为没有了大小电机共同驱动的模式,不用担心发动机被反拖的情况,所以取消了单向离合器。HEV有三种模式,输入动力分流模式定义为ECVT1,固定速比模式定义为HEV,复合动力分流模式定义为ECVT2。其控制策略是在0~60kph大扭矩或者20~40kph小扭矩时使用ECVT1模式,在70~110kph大扭矩或者40~60kph小扭矩时使用HEV模式,在大于110kph大扭矩或者大于60kph小扭矩时使用ECVT2模式。模式切换逻辑见表4
表4 迈锐宝XL模式切换逻辑
EV1模式的杠杆图,功率流如图11所示
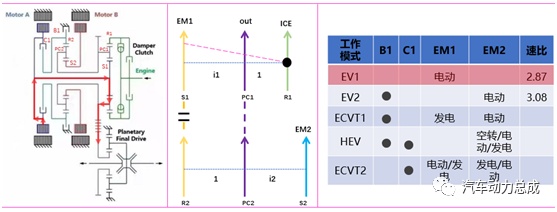
图11 EV1模式
上图中EM1为MotorA,EM2为MotorB。i1=ZR1/ZS1,结合表2齿数信息,i1=86/46=1.87。i2=ZR2/ZS2,结合表3齿数信息,i2=81/39=2.08。EV1因R1和发动机连接,此时发动机曲轴的摩擦力使得R1固定不动提供支点,速比i=ns1/npc1=i1+1=2.87。
EV2模式的杠杆图,功率流如图12所示
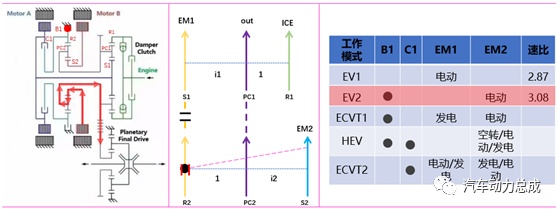
图12 EV2模式
当车速进一步增加,需求扭矩增大,发动机介入,进入输入功率分流模式,功率流和杠杆姿态如图13所示

图13 ECVT1模式
ECVT1模式为输入动力分流,发动机能量在PG1行星排上被分成两路,一路为机械路径直接通过PC1输出驱动车辆,另一路为电功率,驱动EM1转子切割磁感线发电,电能或用于储存(SOC低于设定值时)或用于驱动EM2电机进而驱动车辆。
固定速比HEV模式,B1和C1同时闭合,此时S1和R2同轴,PC1和PC2同轴,杠杆图可以方便的用四轴系统描述,具体见图14

图14 固定速比HEV模式
固定速比模式时,EM1空转,EM2有三种状态,当SOC值较低时,EM2被发动机驱动对电池进行充电;当EM2和EM1一样空转时,发动机直驱;当SOC值较高时,EM2电动助力和发动机共同驱动车辆。
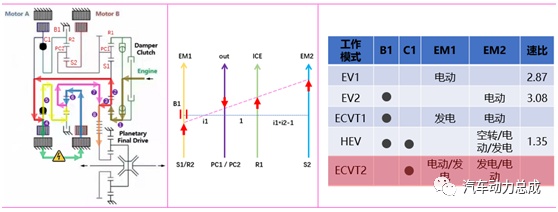
图15 ECVT2模式
ECVT2模式是复合动力分流模式,所谓“复合”包含着这样的涵义,即至少有两种单一分流模式组合在一起。ECVT2正是这样,它由输入和输出两种分流模式复合,见图15。
04、关于复合动力分流的讨论
复合动力分流有个很神奇的特点,EM1和EM2的角色会随着速比的变化而相互转变,也即在某一时刻,EM1为发电,EM2为电动,而随着车速的增快,下一时刻,EM1转变为电动,而EM2则转变为发电。下面根据5ET50行星排齿轮参数,在软件中绘制电机EM1的功率占比曲线,结合功率比曲线讨论EM1和EM2的角色互换。
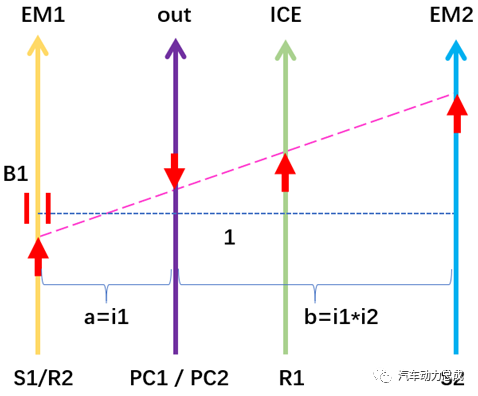
图16 复合动力分流杠杆模型
图16是基于5ET50绘制,在杠杆图上设输出端到发动机距离为单位1,到EM1距离为a,到EM2距离为b,这里a=i1=-1.87(负号表示EM1在输出端左侧),b=|i1*i2|=3.89,则有如下公式

上式中,i是发动机转速和输出转速的比值,也就是速比,η是EM1和EM2能量转换时的效率,αE1是EM1的电功率和发动机功率的比值,根据上述公式,得到如下曲线

图17 复合动力分流模式下电机EM1功率和发动机功率的比
图17中,在A点的右侧,速比较大,车速较慢,此时EM1电功率<0,也就是说EM1处于发电状态,假设不考虑电池的充放电,显然EM1 发的电能只能由EM2来消耗,也就是说EM2必然处于电动状态,事实上将αE1和αE2绘制在一张图上看得更为清晰,见图18
图18 复合动力分流模式下电机EM1、EM2功率和发动机功率的比
再看图17,A点右侧时的杠杆姿态见图16,此时的功率流向如图19所示。
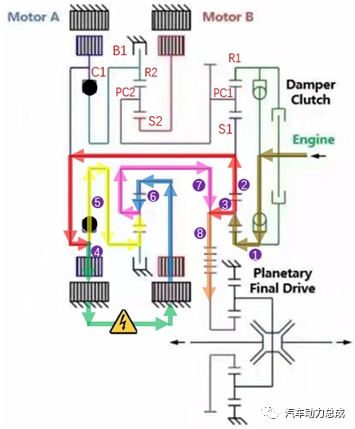
图19 点A右侧时的功率流
解释一下图19,发动机功率①在PG1行星排上被分成②③两路,第②路又被分成④⑤两路,第④路驱动EM1发电,电能用于EM2的驱动,是为第⑥路,⑤和⑥两路在PG2上汇流成第⑦路,最后③和⑦两路汇合成⑧输出。该状态下,PG1为输入动力分流,PG2为输出动力分离,两种单一分流模式合在一起,故称为复合动力分流。
当车速进一步增加,速比减小,越过A点,此时EM1电功率>0,在AB之间,也就是说EM1处于电动状态,由图18知,EM2为发电状态,杠杆姿态如下图

图20 复合动力分流模式AB之间杠杆姿态
此时的功率流如图21所示

图21 AB之间时的功率流
比较图21和图19,功率流截然相反,发动机功率①在PG1行星排上和功率流②汇聚成③输出,显然这是输出动力分流模式。第③路又被分成⑦⑧两路,支路⑧直接输出,支路⑦进入PG2行星排后分成⑤和⑥两路,显然这是输入动力分流。第⑥路驱动EM2发电,产生的电能驱动EM1,是为第④路,④和⑤汇流成第②路。与图19不同的是该状态下,PG1为输出动力分流,PG2为输入动力分离,它们组合在一起也称为复合动力分流。
总结下来,所谓复合动力分流就是将单一的输入或是输出动力分流组合在一起,根据效率高低择优进行单独或是组合使用,以达到高效省油的目的,这也是复合动力分流DHT设计的初衷。
05、总结
虽然通用在2019年因研发资源向纯电动倾斜而终止了包括Volt、Malibu在内的混动车型,但是5ET50任然是一款及其优秀的变速箱,值得我们研究学习。4ET50是业界首次使用输出动力分流量产的DHT,具有极大的创新,丰富了功率分流的使用范围。不管是4ET50还是5ET50,其对性能的不断追求,值得我们投去敬意的一瞥。



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
