




 广告
广告





















































扭矩解析浅谈
2022-02-18 22:25:43· 来源:新能源汽车控制

扭矩解析,顾名思义就是把驾驶员的动力请求理解出来,进行量化处理,使得整车的扭矩需求符合驾驶员的预期。以前,扭矩解析很简单,就是把驾驶员踩加速踏板或制动
扭矩解析,顾名思义就是把驾驶员的动力请求理解出来,进行量化处理,使得整车的扭矩需求符合驾驶员的预期。
以前,扭矩解析很简单,就是把驾驶员踩加速踏板或制动踏板的深度采集出来,再近似线性的映射出一个请求扭矩。后来,有了爬行功能,要求不踩踏板时需要车辆维持一个较低的车速稳定行驶;再后来,新能源车出来了,为了提高能量回收效率,要求不踩踏板时尽量去回收能量;再后来定速巡航出来了,要求车辆能在中高车速下维持定速行驶;到了现在,各种底盘稳定系统和智能驾驶功能都来了,例如车身稳定系统、自适应巡航、自动泊车等等,也都对车辆的扭矩需求提出了新的要求。
不管以后还有什么新的需求,基于以上的几点,当前姑且把扭矩解析可以分为加速踏板扭矩请求、制动踏板扭矩请求、爬行扭矩请求、巡航扭矩请求、其他扭矩请求、扭矩耦合、扭矩限制、扭矩换向、扭矩滤波等几部分。具体功能架构可以参考下图:

加速踏板扭矩请求
加速踏板扭矩计算主要需要考虑驾驶模式、档位、车速(本文指的都是绝对车速)、加速踏板开度。驾驶模式主要通过标定来实现,这里暂不考虑。
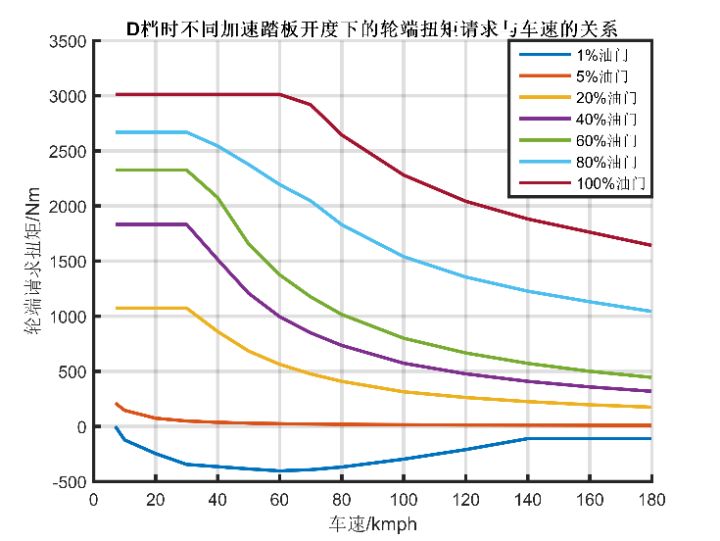
在D档下,轮端扭矩请求与加速踏板开度和车速有关,如下图。同一车速下,加速踏板开度越大,请求扭矩越大,来满足驾驶员的动力需求;同一加速踏板开度下,车速越高,请求扭矩越小,这里主要受到电机外特性的限制。在小油门下,为了提高能量利用率,轮端扭矩请求为负值,车辆会处于滑行回收状态,让电机回收电能,提高续驶里程。
需要注意的是,最大的扭矩请求需要综合考虑电机的最大能力和路面附着所能支持的最大驱动扭矩。
在R档下,轮端扭矩请求的趋势与D档基本一致。考虑到倒挡的安全性,会对最大车速做一个限制。倒挡下车速较低,使用频率也低,所以倒挡不进行滑行回收。
制动踏板扭矩请求
制动踏板扭矩计算主要需要考虑驾驶模式、回收等级、车速、制动踏板开度。驾驶模式、回收等级主要通过标定来实现,这里暂不考虑。
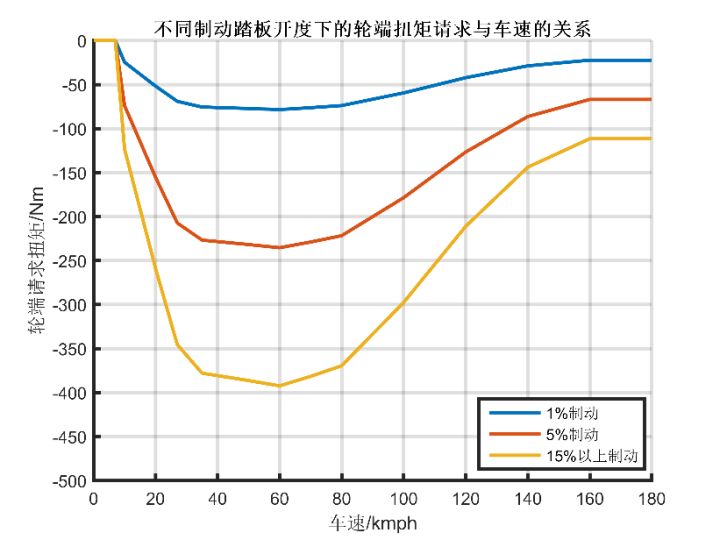
轮端扭矩请求与制动踏板开度和车速有关,如下图。同一车速下,制动踏板开度越大,请求扭矩越大,来满足驾驶员的减速需求和车辆尽量多回收的期望;同一制动踏板开度下,车速越高,请求扭矩先减小再增大,这里主要考虑驾驶性的原因。
需要注意的是,这里并没有随着制动开度的增大而一直加大回收力矩,因为当前新能源车的制动踏板与制动液压系统没有解耦,当制动踏板深度加大时,液压制动会急剧的增大,如果电制动也一直增大,整车的制动感会比较差。以后若干年,线控制动可以上车的话,这里可以考虑放开。
爬行扭矩请求
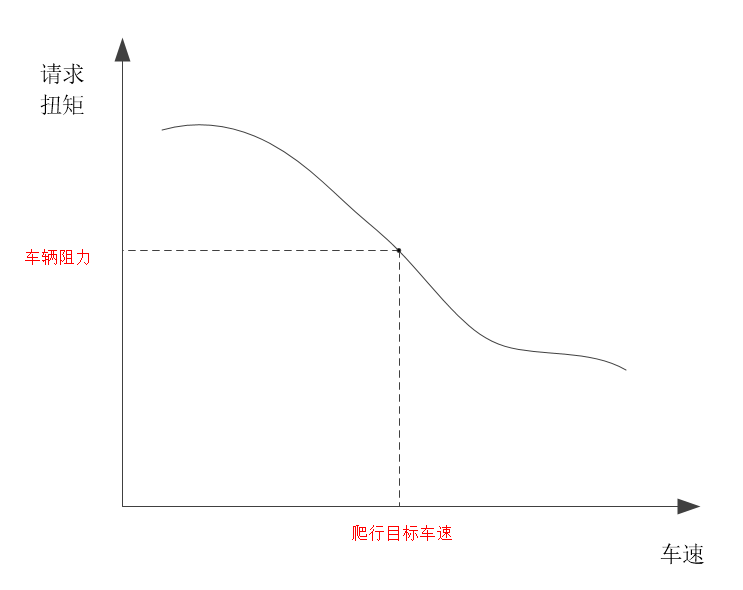
爬行功能,一般为了维持车辆在不踩踏板的情况下以一个较低的车速行驶,通常采用一个开环MAP来维持车速稳定。这个MAP以车速为横坐标,扭矩请求为纵坐标。当车速低于目标爬行目标车速时,扭矩稍大一些,促使车辆加速;当车速高于爬行目标,扭矩稍小一些,让车速减小。整体MAP形状如下图:
巡航扭矩请求
定速巡航扭矩计算比较简单,本质上计算跟随一个PID控制器的输出。这个控制器的目标是驾驶员设置的巡航车速, PID控制器会一直请求一个合适的扭矩来让实际车速逐渐接近目标车速。当巡航功能激活时,我们需要响应该扭矩请求。
其他扭矩请求
其他扭矩请求主要在底盘以及智能驾驶的相关ECU进行计算,主要包括ESP扭矩请求、ACC扭矩请求、AEB扭矩请求等。VCU需要做的就是做好与其他ECU功能之间的交互,需要时及时响应。
扭矩耦合
扭矩耦合就是把上面提到的5类扭矩请求融合,最终输出一个总的扭矩请求。
一般耦合规则如下:
1)由于底盘涉及车辆稳定,智驾涉及自动行驶,所以其他扭矩请求优先级较高,所以当这些功能激活时,一般需要优先执行它们的请求扭矩,未激活时则看另外4个扭矩请求。
2)先定义加速踏板扭矩请求为A、制动踏板扭矩请求为B、巡航或爬行扭矩请求为C。对于A,在小油门为负,大油门为正;对于B,一直为负;对于C,当巡航或爬行功能激活时,可正可负。所以,当A+B > 0 时,表示车辆处于驱动,此时取Max(A+B,C)作为请求扭矩即可;当A+B < 0 时,表示车辆处于制动,巡航功能会退出(C=0),此时取A+B作为请求扭矩。
理论上A与B只会有一个扭矩请求,但是也不排除驾驶员错误操作同时踩油门和刹车,此工况各大主机厂做法有所不同,有的考虑安全以制动为主,有的考虑驾驶性保留部分加速扭矩。
扭矩限制
扭矩限制一般主要考虑档位、最大车速限制、故障等。当车辆接近最大车速时,可以限制请求扭矩下降到一个比较低的水平,保证车辆仅够维持最大车速行驶的动力。当然,车辆处于非驱动档位时,扭矩需要限制为0。在某些故障下,为了保证行车安全,也需要进行限速处理。
假如轮端最大扭矩请求3000Nm,车辆限速160km/h,则其轮端扭矩限制形状一般可以如下图所示。当车速未超过最大行驶车速时,尽量使用电机外特性能力满足驾驶需求;当车速超过允许的最大车速后,直接限扭矩降速。

扭矩换向
一般D档下,踩下加速踏板请求正扭矩驱动,踩下制动踏板请求负扭矩回收。但是,在某些工况并不是很适用,需要做扭矩方向调整,使得请求扭矩符合驾驶员预期。
例如,车辆在向后滑行,此时踩下制动踏板,如果请求一个负的扭矩,电机会加速向后行驶,与驾驶员踩刹车停车的预期不符合,这里就需要把请求扭矩变为正扭矩。
扭矩滤波
扭矩滤波一般通过低通滤波和梯度滤波实现,主要有两个目的:
1)保证请求扭矩尽量平滑,不出现突变等情况;
2)在不同驾驶模式以及部分特殊工况限制扭矩变化速率,调整车辆的扭矩响应特性。
以上,简要介绍了扭矩解析的基本功能,可以发现里面没有复杂的算法,更多的是考虑驾驶员的真实需求,需求分析好了辅以严谨的逻辑,扭矩解析就是成功的。
扭矩解析更多的细节需要在实践中去理解、去优化,越符合用户期望的就是越好的。
- 下一篇:电车试验:充电安全——充电接口安全
- 上一篇:燃料电池发动机各项参数介绍



编辑推荐




最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
