




 广告
广告





















































重型载货汽车全景环视系统的应用研究
2022-02-19 23:10:19· 来源:《汽车电器》

引言:在驾驶中, 驾驶员80%以上的路况信息是依靠视觉获得的。据统计, 在中国因视觉盲区造成的车祸约占30%, 在高速公路上因变换车道所发生的车祸, 其中有70%
引言:
在驾驶中, 驾驶员80%以上的路况信息是依靠视觉获得的。据统计, 在中国因视觉盲区造成的车祸约占30%, 在高速公路上因变换车道所发生的车祸, 其中有70%是由于后视镜盲区造成的。与轿车相比, 重型载货汽车的盲区更为严重。
全景环视系统利用安装在车辆周边的摄像头, 同时采集车辆四周的图像并处理合成一幅车辆周围环视图, 通过车载多媒体屏显示, 让驾驶员清楚查看车辆周边是否存在障碍物并了解相对方位与距离, 可以帮助驾驶员变道、 泊车、 转弯以及通过复杂狭窄路面, 减少事故, 实现安全驾驶。对于重型载货汽车, 基于全景环视系统的驾驶辅助系统的应用意义很大。
来源:《汽车电器》
单位:北京福田戴姆勒汽车有限公司
作者: 赵 阳
01、全景环视系统驾驶辅助系统应用意义
与轿车相比, 重型载货汽车的盲区更为严重,盲区分为半盲区和全盲区。 除了本身的盲区和半盲区, 重型载货汽车还有巨大的内轮差。 巨大的盲区和内轮差导致重型载货汽车事故起数最多, 如图1所示。

全景环视系统利用安装在车辆周边的摄像头, 同时采集车辆四周的图像并处理合成一幅车辆周围环视图, 通过车载多媒体屏显示, 让驾驶员清楚查看车辆周边是否存在障碍物并了解相对方位与距离, 可以帮助驾驶员变道、 泊车、 转弯以及通过复杂狭窄路面, 减少事故, 实现安全驾驶。对于重型载货汽车, 基于全景环视系统的驾驶辅助系统的应用意义很大。
02、全景环视系统构成
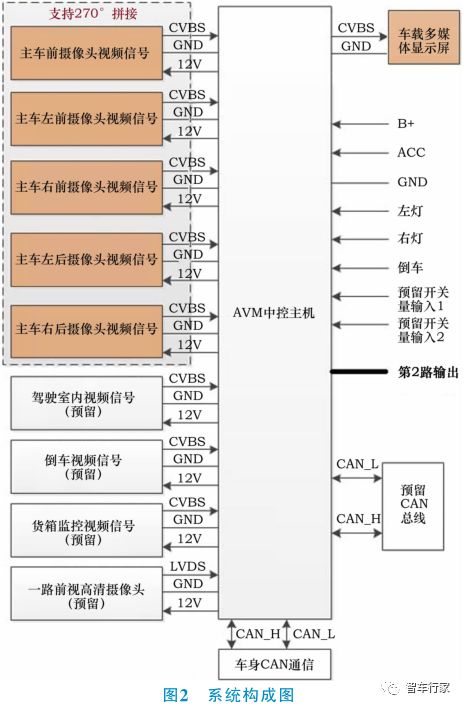
通过对行业需求和行业现状的分析, 策划适用于重型载货汽车的全景环视系统。系统构成如图2所示。
1 ) 系统支持5~8路摄像头输入, 可根据实际选择使用。
分别为:①前部摄像头;②左侧向下摄像头;③左侧向后摄像头;④右侧向下摄像头;⑤右侧向后摄像头;⑥驾驶室后摄像头;⑦后摄像头;⑧货厢内监控摄像头。其中前5路摄像头安装在驾驶室上, 分别位于前遮阳罩处和左右后视镜下方, 此5路摄像头用于实现270°的图像拼接;序号⑥~⑧摄像头用于单视图显示, 可按需安装相应的摄像头。
2 ) 支持两路视频输出:一路输出给多媒体屏显示, 用于驾驶辅助的人机交互界面;另一路输出给存储设备, 用于视频记录。
3 ) 系统可支持的功能如下:①全景环视系统, 即AVM( Around View Monitor ) ;②基于全景的行车记录, 即VDR( Vehicle Driving Record ) ;基于全景的近距离移动物体监测预警, 即MOD ( Moving Object Detection ) 。
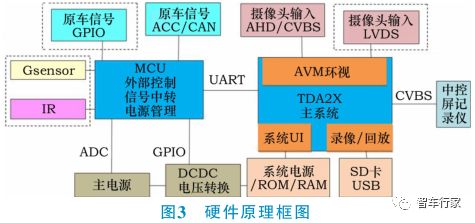
4 ) 硬件原理框图如图3所示。
03、系统功能
功能列表见表1。
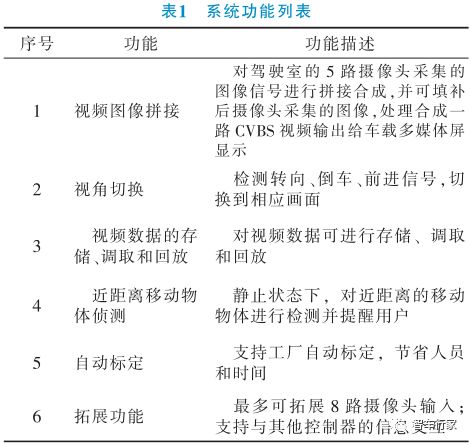
各模式功能描述如下。
3.1 用户被动进入模式
倒车辅助:车辆倒车时, 强制开启全景, 多媒体屏显示全景图+后视图的模式。
3.2 用户主动进入模式
用户需要全景环视系统功能时, 可点击车载多媒体屏UI界面上的“全景环视” 图标开启, 则可进入此系统界面。用户主动进入此功能界面后, 可实现不同模式下的辅助功能。
1 ) 前行:车辆前行时, 显示全景图+左视图的模式。
2 ) 左右转弯:开启转向灯, 车速≤30km/h, 进入转弯模式。当“左转” 时, 显示全景图+左视图的模式;当“右转” 时, 显示全景图+右视图的模式。
3 ) 左右变道:开启转向灯, 车速>30km/h。当左右变道时, 通过左或右侧向后摄像头清楚显示左或右后侧视频图像, 显示全景图+左/右后视图。将左或右后侧方的情况进行展示, 防止后视镜的盲区造成的事故, 还可俯看全车周边整体情况。
4 ) 倒车辅助:车辆倒车时, 多媒体屏显示全景图+后视图的模式。
5 ) 视频记录存储:全景环视系统具有本地行车记录存储功能, 记录的视频画面格式为6宫格形式 ( 若安装6个摄像头 ) 。视频存储在SD卡上, 并能通过多媒体屏上“视频回放”菜单进行回放操作。若控制器里没有安装SD卡, 中控显示屏上可提醒“请安装SD卡” 字样 ( SD卡由用户自行购买安装,可支持128G ) 。
6 ) 近 距 离移动物体侦测:车 辆 静 止 状 态下 , 对 2m 内 的移动物体进行侦测并提醒用 户 ,
如图4所示。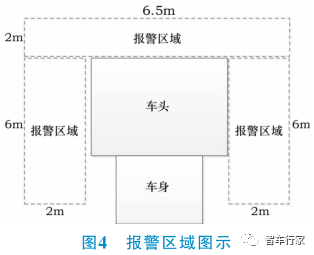
04、实施意义
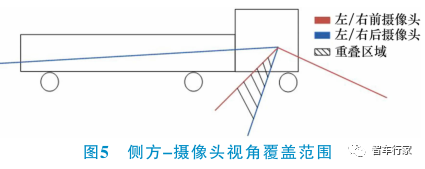
解决重型载货汽车盲区问题, 不仅与摄像头本身硬件、 主机软件算法相关, 也与摄像头安装位置和角度息息相关, 要确保摄像头安装后尽可能覆盖盲区范围。
1 ) 从车侧方看, 安装摄像头后视角覆盖范围如图5所示。
2 ) 俯视角度看, 安装摄像头后视角覆盖范围如图6所示。
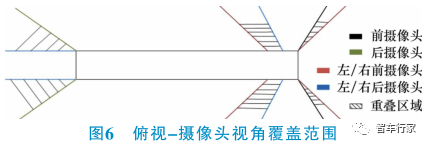
从以上两个视图角度分析, 几乎能覆盖全部视觉盲区。
且若为牵引车, 还可以满足挂车的不确定性, 若挂车货厢比驾驶室宽一些, 会有不可避免的微小盲区, 预计20cm以内, 俯视角度如图7所示。
综上, 此方案弥补了后视镜观测的半盲区和全盲区以及内轮差引起的视线死角。且对于重型载货汽车带挂行驶时, 左右转弯时, 也能实现相应转向的危险区域的无死角。避免了重型载货汽车在道路行车中, 最容易产生事故的各种情况, 确保了安全驾驶。
结论
通过对重型载货汽车本身的结构特点进行研究, 开发全景环视系统应用于重型载货汽车, 具有实际应用意义。从用户角度出发, 真实地给用户带来行车中的便利和安全。在车辆起步、 行车转弯、 窄道会车、 变道、 规避障碍等情况时,辅助用户合理驾驶, 有效提升行车安全, 减少车辆刮蹭、 碰撞等事故的发生。相信随着时间的推移, 全景系统功能逐渐完善和普及,安全性能方面会取得显著进展。
- 下一篇:低速自动驾驶技术:APA
- 上一篇:电机多转速工况的NVH分析



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
