




 广告
广告





















































基于非耦合的加速度计的GNSS欺骗检测并使用统计和小波变换测试
2022-02-21 13:20:32· 来源:轩辕实验室

*本文来自轩辕实验室杨杰森的研究成果和学习笔记。01-概述这篇论文主要关注使用加速度计和GPS测量值进行比较的检测方法,之前的研究使用从航空器上收集的数据来
*本文来自轩辕实验室杨杰森的研究成果和学习笔记。
01-概述
这篇论文主要关注使用加速度计和GPS测量值进行比较的检测方法,之前的研究使用从航空器上收集的数据来检测欺骗攻击,本文将着眼于将这些技术应用于汽车,并介绍另一种使用小波的潜在检测方法,本文分为如下章节:第二节会介绍怎么使用惯性来检测欺骗的背景,第三节会介绍实验测试设置,第四节会看到使用统计测试均值差和样本方差欺骗检测算法的性能,第五节研究了小波在欺骗检测中可能具有的潜在作用,最后第六节给出了这项工作的结论以及汽车未来的研究领域,并介绍了另一种使用小波的潜在检测方法。
02-使用惯性欺骗检测
加速度特征
一个欺骗者无法精确猜出密码术语中先验表示的加速曲线,如果一个欺骗者不能充分预测它,我们可以使用由加速度计确定的实际加速度轮廓和欺骗的GNSS加速度之间的差异来检测欺骗,飞行结果表明,可能有许多不可预测的加速来源——风、飞行员的推力输入、起落架的降低等,由于颠簸、驾驶员输入和转弯,汽车应用也应该难以预测,平行于路径方向,垂直于路径方向和竖直方向加速度可能都很难先验预测,即使驾驶路线已经知道,这甚至可能很难几乎实时地确定,因为攻击者可能不容易确定由驾驶者启动的确切时间转弯和加速度。
然而,为了使加速度曲线有用,它必须有足够高的信号相对于传感器噪声和误差引起的比较处理。通过合理的加速度曲线,任何没有良好估计车辆加速度的欺骗攻击都应该被检测到,即使是可以远程测量加速度或从机载设备测量加速度的欺骗者也可以检测到,这是因为欺骗者会产生错误和延迟,如果有高频动态,可以检测到错误和延迟。
轴对齐
由于在不同的参考坐标系上测量GNSS衍生加速度,因此有必要将GNSS衍生加速度与加速计衍生加速度进行旋转和对齐,当加速计在车身框架中对齐时,要进行这种校准,需要了解车辆的方向。
在方向已知的情况下,我们将GNSS加速度旋转到身体轴。方程式1和2中显示了这一点,其中α、β和γ分别是航向角、俯仰角和横滚角。由于加速度计测量的是特定的力而不是惯性加速度,我们需要补偿重力。我们可以将重力加速度g(名义上设置为9.81米/秒平方(m/s2))加到GNSS向上方向,或者从加速度计z轴上减去它。前者见等式(1)。然后我们可以计算加速度计和GNSS加速度之间的加速度差。
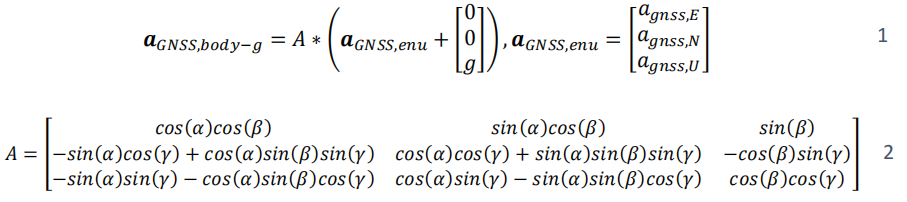
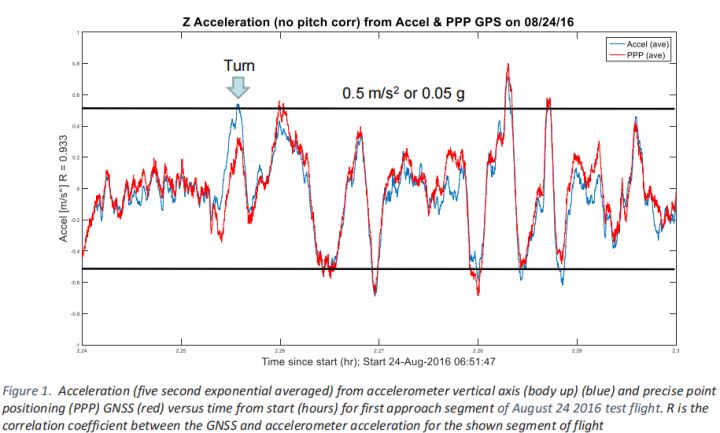
图1显示了GNSS和商用现货(COTS)智能手机加速计的垂直加速度曲线,图2显示了两个传感器之间产生的加速度差。

03-实验配置
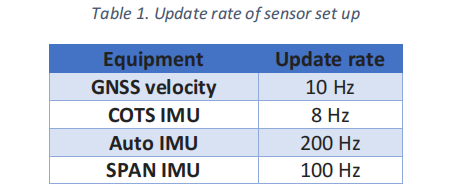
我们的测试车由全球导航卫星系统(GNSS)和几个惯性测量单元(IMU)组成。所使用的全球导航卫星系统接收器是带有Novatel风车天线的Novatel SPAN。使用了三个等级的MEMS IMU——特别是COTS智能手机(Galaxy Note 3)、汽车(Bosch)和高级MEMS(Novatel SPAN)。图3显示了测试设置,表1显示了数据收集率。如图所示,IMU通常是并置的,而GNSS天线位于IMU上方的车顶上。

04-使用统计方法欺骗检测
虽然我们可以观察到全球导航卫星系统和加速计之间测量加速度的差异,但我们需要有明确的测试,能够可靠地检测异常行为,并降低错误警报的概率。因此,开发了基于统计测试的单独监测器,以检查真实GNSS和加速计加速度之间应一致的特定测量特性。使用统计测试是因为它们是直截了当的,而且它们的性能很容易评估。由于虚假加速可能导致不同的不一致性,因此可以开发多个不同的监视器。执行监视器(EM)然后综合各个监视器的结果,以提供欺骗指示。该设计架构如图9所示。
图9所示的体系结构对于整体欺骗检测非常有用,因为它可以帮助实现良好的检测,并且错误警报率非常低。由于检测可能会导致向用户发出警报并中断服务,因此错误警报是有害的,因为它们会使系统在其他情况下不可用。此外,错误警报可能导致对系统的不信任,可能导致用户忽略警报。因此,最小化错误警报非常重要。我们认为,如果探测系统在其整个生命周期内几乎没有虚假警报(几乎为零),那么它才会有用,而不会被视为一种责任,由于通常不存在欺骗,这意味着错误警报率极低,实现这一点并不一定容易,因为很难区分欺骗签名和自然事件,多径、闪烁和其他现象可能被误认为是欺骗,通过适当的设计和EM,许多不同的独立欺骗测试可以帮助最小化错误警报。

测试监视器
由于存在多种可能的加速度测量比较,可以为全球导航卫星系统欺骗监测开发几种监测器。第一个检查的是加速度的差异,因为这是相对直接的。也可以使用加速度曲线的其他特征。例如,加速度(所谓的急动)变化率应该相似。加速度在一个时间窗口内的变化也应该类似。此外,可以针对每个轴(沿轨道、交叉轨道或垂直)检查这些比较。所有这些都应在误差公差范围内匹配。
统计测试
表3显示了每个比较度量的含义:




编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
