




 广告
广告





















































应用驱动定义自动驾驶感知Corner Case
2022-02-27 11:08:12· 来源:ADS智库 作者:黄浴

arXiv上传2021年3月的论文“An Application-Driven Conceptualization of Corner Cases for Perception in Highly Automated Driving“,发表在IEEEE IV‘21(20
arXiv上传2021年3月的论文“An Application-Driven Conceptualization of Corner Cases for Perception in Highly Automated Driving“,发表在IEEEE IV‘21(2021年7月),作者来自德国几所大学和研究机构。
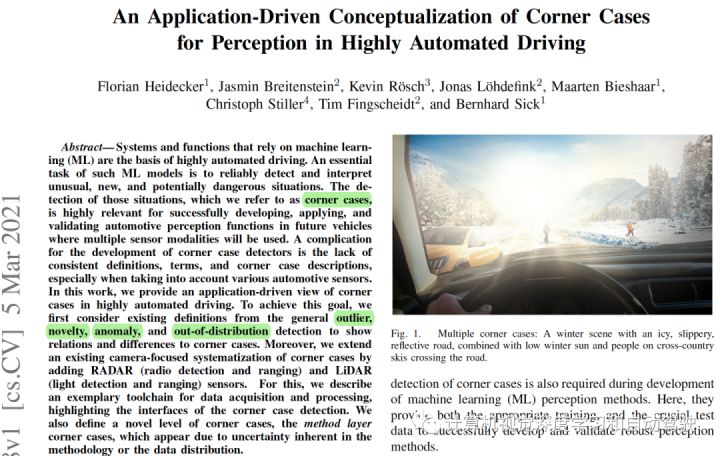
机器学习在自动驾驶的一项基本任务是可靠地检测和解释异常、新出现的、以及潜在危险的情况,即Corner Cases的检测。其中一个复杂问题是缺乏一致的定义、术语和描述,尤其是考虑到各种汽车传感器。这项工作提供了一种Corner Cases的应用驱动视角。
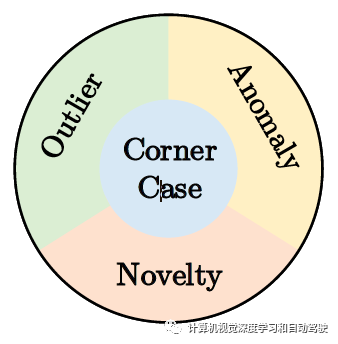
首先考虑现有来自异常值(outlier)、新颖性(novelty)、异常(anomaly)和OOD(out-of-distribution)检测的定义,体现出和极端情况(Corner Cases)的关系和差异。
此外,添加雷达和 激光雷达传感器,扩展现有的以相机为中心的corner cases,变得更加系统化。为此,给出一个用于数据采集和处理的示例性工具链,突出corner cases检测的接口。
作者还定义了一个新的corner cases级别,即方法层面的corner cases,它的出现是由于方法或数据分布中固有的不确定性造成的。
定义视觉感知的系统化Corner Cases,其中Corner Cases按级别进行分类。这些级别基于包含的情况类型,并按理论性检测的复杂性排序。
并考虑场景、目标(例如,越野滑雪的人)和域(例如,下雪的冬天)等级别的Corner Cases,将其总结为内容层。此外,对于场景级的Corner Cases,定义了时域层,例如,与行人相比,越野滑雪人的异常运动。根据目标是涉及单个图像帧和点云(内容层)还是多个连续帧(时域层)对Corner Cases做分组。
为了提供更全面的Corner Cases定义,考虑多模式传感器的输入,本文把像素级和点云级Corner Cases的最低理论性检测复杂度做区分,都称为传感器层。
如图是机器学习常见的术语:
Edge Cases:指很少发生但已经考虑到的情况或参数,也类似于extreme cases或boundary cases。相比之下,Corner Cases是由几种正常情况或参数的组合碰巧一起产生的,因此代表了罕见或从未考虑过的情况或场景。
Outlier: 定义为“一个观察结果与其他观察结果相差很大,以至怀疑它是由不同的机制产生的”。对于Corner Cases,遵循类似的理解。
Anomalies: 有人作为噪声数据看待,这些数据会造成artifacts;一种定义是看成极低发生频率的事件。对于自动驾驶的Corner Cases,指不符合规范的行为,或模式中存在偏离常态的情况。anomaly 和 corner case几乎是同义词。
Novelties: 指以前未见过的实例或目标。也有说是,异常的空间或时间聚集,或已知过程的分布变化。新的情况、目标和运动模式的出现,是corner case的一个基本特征。
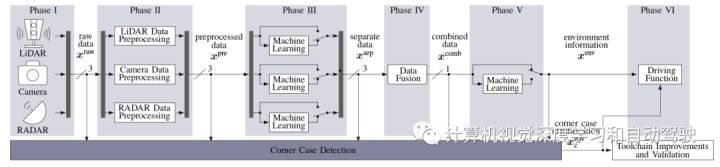
如图是数据处理工具链的流水线图:包括摄像头、激光雷达和雷达传感器,分别是数据获取(I)、数据预处理(II)、早期机器学习(III)、数据融合(IV)、晚期机器学习(V)和应用(VI)等步骤,corner case可能出现在工具链的多个环节。
摄像头分成CCD/CMOS、rolling shutter/global shutter、Rectilinear/wide-angle/fisheye等。
激光雷达分机械式和固态两种,还有2-D/3-D区别、不同线束(比如16-32-40-64-128)等。
雷达分成短距、中距和远距三种。
传感器融合分成早融合和晚融合。另外,cross fusion或者中期融合(middle fusion)直接在神经网络的中间表示层融合特征。
文章给出一个系统化的corner case分类,如表所示:

表格纵向是传感器的corner case种类,即激光雷达、摄像头和雷达;表格横向分成传感器层、内容层和时域层。
1)传感器层分成硬件级和物理级;
传感器的硬件级问题包括:
a)激光雷达错误有破碎的镜子和未校准的执行器;
b)摄像头(像素)错误包括坏点和破碎的镜头;
c)雷达错误(脉冲)包括低电压和低温。
传感器的物理级问题包括:
a)激光雷达错误(基于光束)包括黑车看不见;
b)摄像头(像素)错误包括镜头污迹、过饱和/曝光;
c)雷达(脉冲)错误包括干扰。
2)内容层分成域、目标和场景三个级;
域级问题包括:
a)激光雷达的点云域迁移中道路标记的形状;
b)摄像头在单帧域迁移中的定位;
c)雷达在域迁移的天气。
目标级问题包括:
a)激光雷达的点云异常(灰);
b)摄像头的异常(动物出现);
c)雷达的异常(丢失目标)。
场景级问题包括:
a)激光雷达的集体性/上下文异常(人行道清扫);
b)摄像头的集体性/上下文异常(广告牌上的人照);
c)雷达集体性/上下文的异常(街道的树木)。
3)时域层只有场景一个级别;
场景级的问题(多个图像帧或者点云帧)包括:人违反交通规则、超越的自行车和车祸等等。
所谓方法层的corner case级别,例如机器学习方法的不确定性问题,即认知不确定性(epistemic uncertainty);另外,例如对抗样本,是对抗学习采用的方式。
corner case的检测方法在作者之前的文章讨论过摄像头数据,有些方法可以扩展到激光雷达和雷达领域。
本文提到一些激光雷达和雷达的corner case检测方法,比如雷达数据采用的density-based clustering、open-set classification、SV-Means等,还有激光雷达数据的open-set instance segmentation network。
评估的数据:
摄像头:
数据有不少,比如Cityscapes, BDD100k, openDD, Mapillary Vistas;针对未知目标检测的数据有RoadAnomaly, Lost&Found, Fishyscapes;还有针对VRU的检测数据Eurocity Persons。
激光雷达:
早期工作就有数据KITTI,包括图像合激光雷达点云,其他类似的 Apolloscape, A2D2, Waymo Open, PandaSet, KAIST等等;数据 Canadian Adverse Driving Conditions 特别提供了冬天的图像和点云。
雷达:
数据很少,可以发现的有nuScenes, Astyx HiRes2019, Oxford RobotCar, RADIATE给出了摄像头、激光雷达和雷达的数据 (Oxford RobotCar 没有给雷达的GT)。
评估的方法:
摄像头:
一般是area under the receiver operator characteristic (AUC),area under the precision-recall curve (AUPRC)。
激光雷达:
average precision (AP),IoU (semantic segmentation),panoptic quality (PQ) 和 unknown quality (UQ)。
注:雷达没有提,估计是按照激光雷达的方法。
重要参考文献:
[1] “Systematization of Corner Cases for Visual Perception in Automated Driving,” IV, Las Vegas, USA, 2020.
[17] “Towards Corner Case Detection by Modeling the Uncertainty of Instance Segmentation Networks,” in Proc. of ICPR, Workshop, Milan, Italy, 2021.
[21] “Corner Cases for Visual Perception in Automated Driving: Some Guidance on Detection Approaches,” arXiv:2102.05897, 2021.
[23] “Open-Set Radar Waveform Classification:Comparison of Different Features and Classifiers,” IEEE International Radar Conference, Washington DC, 2020.
[50] “Entropy Maximization and meta Classification for Out-of-Distribution Detection in Semantic Segmentation,” arXiv:2012.06575, 2020.



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
