




 广告
广告





















































基于四轮转向和直接横摆力矩控制的自主地面车辆LPV/H∞路径跟踪控制器设计
2022-03-01 20:37:54· 来源:同济智能汽车研究所

2.2. 多面体模型
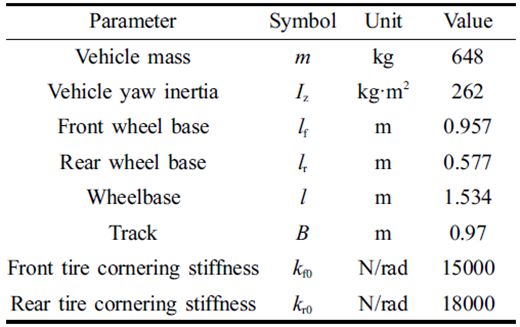
由于车辆纵向速度和轮胎侧偏刚度对车辆操纵稳定性有显著影响,为使车辆获得更好的动态性能,这里基于时变但可测量或可观察的参数构建线性变参数(LPV)模型。考虑到轮胎侧偏刚度主要受路面摩擦系数的影响,因此可以将轮胎侧偏刚度的不确定性转化为路面摩擦系数的不确定性。因此,实际的前后轮胎侧偏刚度可以表示为

和
,其中
为路面摩擦系数,
和

为前后轮胎的名义侧偏刚度,因此辅助时变参数可选为
,
和

。表示参数变化的向量为

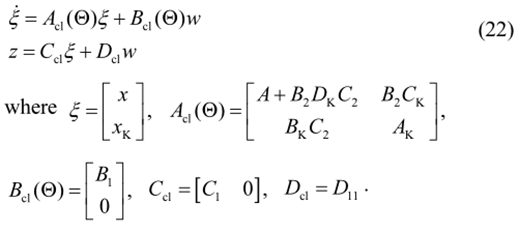
用于设计控制器的LPV系统可描述为:

其中
此外,矩阵
、

和

的仿射模型可以表示为

其中




由于

,变参向量有以下八种组合:
基于不同变参向量

,公式(11)为:

其中
表示最小或最大。
因此,控制系统(10)的具有八个顶点的多面体模型可以表示为:

其中

为八个顶点的权重,并且遵循以下条件

可以选择为

的连续函数,与

的顶点值、测量或估计的车辆纵向速度和轮胎侧偏刚度有关。为简化起见,八个顶点的权重为(Jin et al., 2016):
其中
3 控制系统设计
3.1. 总体控制框架
4WIS-4WID EV的路径跟踪控制系统框图如图3所示。路径跟踪控制系统主要由两部分组成:(1)纵向运动控制;(2)侧向和横摆运动控制。纵向运动控制的目的是利用轮式电机产生的纵向力,使车辆达到理想的纵向运动响应。期望纵向力由四个轮胎纵向力之和直接计算。考虑到纵向运动控制不是路径跟踪控制的重点,本文主要研究了4WIS-4WID电动汽车的侧向和横摆运动控制。侧向和横摆运动控制由4WS和DYC实现。利用所提出的LPV/H∞控制器计算了前、后转向角信号和外横摆力矩信号。然后,利用单轨模型的前后转向角信号,根据Ackerman转向几何模型计算出每个车轮的转向角。根据DYC的外横摆力矩信号和纵向运动控制所需的纵向力,根据控制分配算法计算出各车轮的驱动力矩。
图3 4WIS-4WID电动汽车路径跟踪控制系统图
3.2 LPV/H∞控制器设计
对于控制器设计,在控制系统

- 下一篇:中汽中心的新发展与战略转型
- 上一篇:上汽集团宣布成立“上汽集团创新研究开发总院”。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
