




 广告
广告





















































基于四轮转向和直接横摆力矩控制的自主地面车辆LPV/H∞路径跟踪控制器设计
2022-03-01 20:37:54· 来源:同济智能汽车研究所

(1)闭环系统渐近稳定,能量比增益满足:

(2)存在满足以下条件的对称正定矩阵

:
对于矩阵
,如果

以及

且对于任意矩阵

存在

,则矩阵

可视为对称正定矩阵。
基于上述引理,我们引入以下定理来求解LPV/H∞控制器。
定理1.给定正常数γ的情况下,次优输出反馈控制器存在的充要条件是存在对称正定矩阵
和

和矩阵

且满足以下条件:
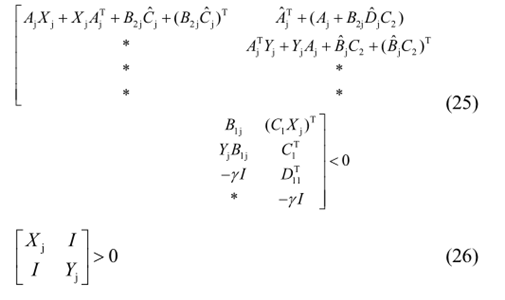
其中*表示可以通过对称获得的项。
证明。由于方程(24)中的矩阵变量
和控制器参数矩阵

和

是强非线性的,很难通过求解方程(24)来获得输出反馈控制器。基于变量代换法,将方程(24)转化为线性矩阵不等式(LMI)的标准形式,便于LMI工具箱求解。在变量替换方法中,提出了一组新的矩阵变量。然后,利用新的矩阵变量将原非线性矩阵不等式转化为线性矩阵不等式。因此,可以使用LMI方法计算出新的矩阵变量的结果。根据新的矩阵变量和原始矩阵变量之间的替换关系,可以方便地计算出原始矩阵变量的结果。
根据引理1,矩阵变量

及其逆矩阵被划分为

其中

、
是对称正定矩阵。
根据方程式

,可以得出:

此外,还可得出

定义两个矩阵

然后,方程式(29)可以改写为基于该方程式,可以导出以下方程式。

为了将方程(24)转换为LMI的标准形式,基于上述方程,定义了以下新的矩阵变量进行变量替换。
从方程(35)可以看出,控制器参数矩阵

、

、
和

是给定对称正定矩阵
和
以及满秩矩阵

和
的唯一解。
通过将方程(24)两侧的前乘
和后乘

,并结合方程(31)到(35),我们可以容易地得到等价条件方程(25)。我们可以看到,这是关于矩阵变量

和
的标准LMI。因此,LMI的求解方法与方程(25)相同。
- 下一篇:中汽中心的新发展与战略转型
- 上一篇:上汽集团宣布成立“上汽集团创新研究开发总院”。



 广告
广告
编辑推荐




最新资讯
-
艾默生宣布推出NI LabVIEW+ Suite for HIL
2025-03-17 20:29
-
中汽中心工程院推出低空飞行器测试服务
2025-03-17 20:22
-
突破低温风噪难题!CATARC风洞开启冬季静谧
2025-03-17 20:19
-
北橡院组织制定的国际标准ISO 5273:2025正
2025-03-17 20:17
-
数字孪生场景+GNSS模拟器解锁智驾高效测试
2025-03-17 20:15
