




 广告
广告





















































基于四轮转向和直接横摆力矩控制的自主地面车辆LPV/H∞路径跟踪控制器设计
2022-03-01 20:37:54· 来源:同济智能汽车研究所

在获得方程(25)的可行解后,要根据方程(35)中的替代关系找到控制器参数矩阵
和
,必须首先计算出矩阵

和
的结果。基于辨识

,可以得出如下结论

在得到矩阵

和
的值后,可以通过矩阵

的奇异值分解得到矩阵

和

的结果。因为

是一个对称正定矩阵,所以可以导出方程(26)中的条件。而。一般来说,可以得出结论,矩阵
和
总是可以通过奇异值分解得到,以满足方程(25)。
最后,控制器参数矩阵

和

的推导如下,证明完成。

根据等式(25)、(26)和(37),可以计算出八个垂直控制器
。最后,输出反馈LPV/H∞ 控制器可以表示为
3.3. 控制分配算法
由于4WIS-4WID 电动汽车是一个执行冗余系统,每个轮内电机的扭矩可能不同,以使车辆获得更好的动态性能。外部偏航力矩可通过左右两侧车轮之间的扭矩分配产生,以提高车辆操纵稳定性。前轮和后轮之间的扭矩分配有利于车辆的动力性能和经济性。本节提出了控制分配算法,以提高车辆操纵稳定性。
在高速行驶时,车轮转向角通常非常小,因此转向角对总纵向力和外部横摆力矩的影响可以忽略。外部偏航力矩用方程式(2)表示,总纵向力可以写成

假设每个轮胎在稳定状态下工作,且滚动阻力被忽略,则每个轮胎的纵向力可表示为

其中

表示每个轮毂电机的扭矩,

表示轮胎滚动半径。
将等式(40)代入等式(2)和(39)得到

其中
,
和
是有效性矩阵,其中
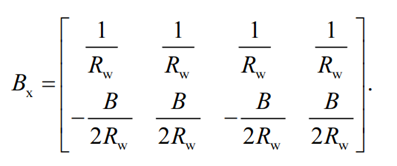
对于控制分配,一个目标是最小化分配误差:

其中

是广义力的加权矩阵,

和
分别是控制向量的上界和下界。
从等式(42)可以看出,控制分配问题应该在约束范围内解决。执行器的约束包括执行器的能力约束和道路条件约束,由下式给出:
其中
表示每个轮胎的垂直载荷。
和

分别表示轮内电机的最小和最大输出扭矩。轮毂电机的输出扭矩与工作速度有关,关系如图6所示。从图中可以看出,电机在低于基本转速的转速下,在恒定转矩范围内工作。当电机转速高于基本转速时,输出扭矩随转速的增加而减小。因此,电机在恒定功率范围内工作。
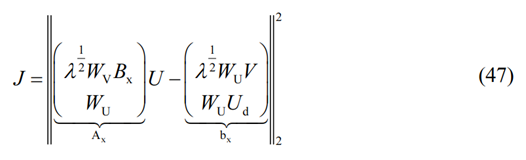
此外,另一个优化目标可以表示为

其中

是目标控制值,
是执行器的加权矩阵。
结合等式(42)和(44),控制分配算法可以表示为

上述分配方法也称为顺序最小二乘(SLS)分配算法。第一步是求出控制向量集,使可行域内的加权分配误差

最小。然后,选择最接近目标控制值

的期望控制向量

。
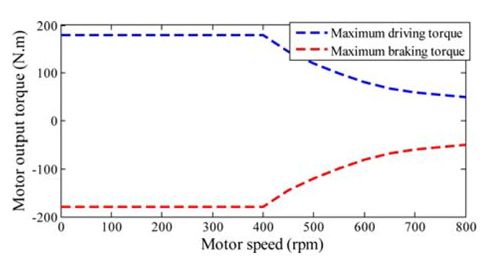
图6 轮毂电机的最大输出扭矩
为了方便起见,上述两个步骤可以通过加权参数组合成一个步骤,通过权重参数
使用带权最小二乘(WLS)分配算法,其可表示为

与SLS分配算法相比,WLS分配算法的计算时间可以大大减少,并且
通常设置得非常大,以便将分配错误降至最低。
此外,等式(46)中的目标函数可以简化为
一般来说,使用WLS分配算法的控制分配问题可以写成

- 下一篇:中汽中心的新发展与战略转型
- 上一篇:上汽集团宣布成立“上汽集团创新研究开发总院”。



 广告
广告
编辑推荐




最新资讯
-
「智能座椅」 智能座舱下一个要卷的配置来
2025-03-18 08:23
-
香港汽车新规:强制安装过高警示系统
2025-03-18 08:22
-
艾默生宣布推出NI LabVIEW+ Suite for HIL
2025-03-17 20:29
-
中汽中心工程院推出低空飞行器测试服务
2025-03-17 20:22
-
突破低温风噪难题!CATARC风洞开启冬季静谧
2025-03-17 20:19
