




 广告
广告





















































基于四轮转向和直接横摆力矩控制的自主地面车辆LPV/H∞路径跟踪控制器设计
2022-03-01 20:37:54· 来源:同济智能汽车研究所

由于每个轮毂电机的工作输出扭矩与相应轮胎的垂直负载成正比,因此执行器的加权矩阵

定义为:
广义力的加权矩阵

用于调整总纵向力和外部横摆力矩的优先级,即当车辆在大横向加速度条件下行驶时,可以增加外部横摆力矩的权重,以提高车辆的操纵稳定性。由于采用了4WS技术来改善车辆的动态性能,因此总纵向力和外部横摆力矩的权重暂时设置为相同值。

4 仿真和评价
为评估设计的LPV/H∞控制器实现4WIS-4WID电动汽车的路径跟踪,基于在CarSim中构建的高保真整车模型,进行了两个仿真案例。表1列出了仿真的车辆参数,原型车辆如下图7所示。
表1 仿真中的车辆参数
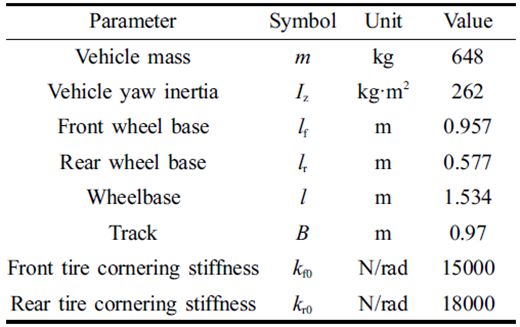

图7 4WIS-4WID电动汽车原型车
4.1.单车道变换操纵
在此仿真案例下,基于所设计的LPV/H∞控制器和控制分配算法,对4WIS-4WID电动汽车进行了单车道变换操纵。为了更好地显示LPV/H∞控制器的性能,仿真结果还显示了固定增益H∞控制器的路径跟踪性能。在模拟情况下,车辆纵向速度设定为20m/s,道路摩擦系数设定为0.3。
图8显示了两个控制器在单车道变换操纵中的路径跟踪结果。为了更好地显示路径跟踪性能,图9和图10分别显示了横向位置误差和偏航角度误差。可以看出,LPV/H∞控制器的横向位置误差和偏航角误差都比固定增益H∞控制器小得多,表明所设计的LPV/H∞控制器具有更好的路径跟踪性能。此外,固定增益H∞控制器的跟踪误差不能收敛到零,这往往是不稳定的。
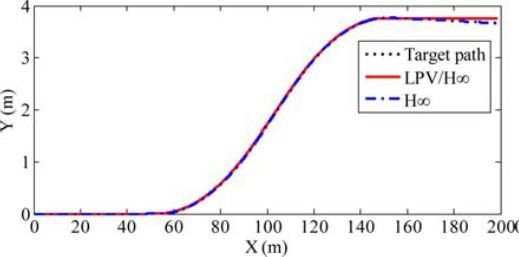
图8 单车道变换仿真中的路径跟踪结果
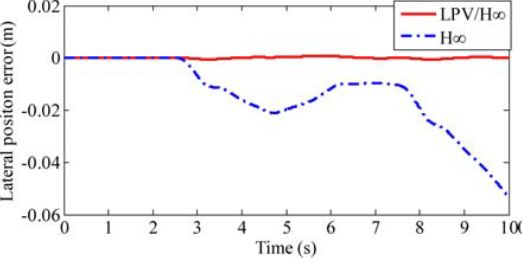
图9 单车道变换仿真中的横向位置误差
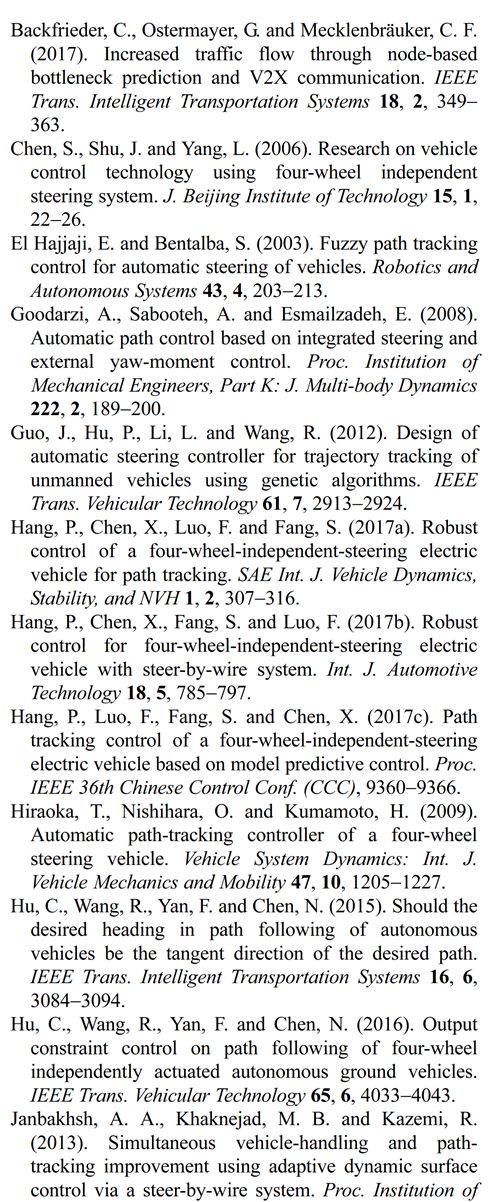
图10 单车道变换仿真中的偏航角度误差
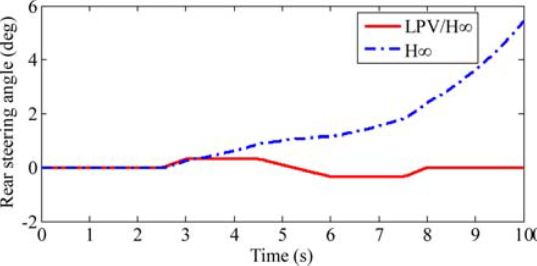
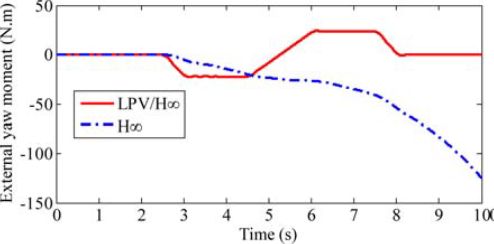
从图11~13中可以看出,固定增益H∞控制器的前后转角变化都比LPV/H∞控制器大得多。固定增益H∞控制器的输出不能收敛到稳态值,但对于LPV/H∞控制器却有相反的结论。可以推断,固定增益H∞控制器充分利用了较大的转向角和外部横摆力矩来改善车辆的动态性能。然而,车辆往往是不稳定的。结果表明,当车辆行驶在低粘着路面时,LPV/H∞控制器具有较好的控制效果。两个控制器的横向速度如图14所示,可以观察到LPV/H∞控制器帮助车辆获得较小的横向速度,几乎接近于零。也就是说,安装了LPV/H∞控制器的车辆具有更好的操纵稳定性。此外,横摆角速度如图15所示。
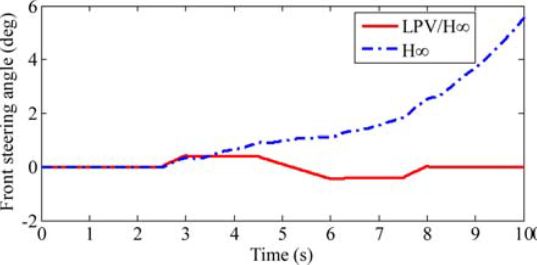
图11 单车道变换仿真中的前转向角
图12 单车道变换仿真中的后转向角
- 下一篇:中汽中心的新发展与战略转型
- 上一篇:上汽集团宣布成立“上汽集团创新研究开发总院”。



 广告
广告
编辑推荐




最新资讯
-
艾默生宣布推出NI LabVIEW+ Suite for HIL
2025-03-17 20:29
-
中汽中心工程院推出低空飞行器测试服务
2025-03-17 20:22
-
突破低温风噪难题!CATARC风洞开启冬季静谧
2025-03-17 20:19
-
北橡院组织制定的国际标准ISO 5273:2025正
2025-03-17 20:17
-
数字孪生场景+GNSS模拟器解锁智驾高效测试
2025-03-17 20:15
