




 广告
广告





















































PACC预见性自适应巡航的节油率实测分析

导读
据数据显示,在商用车的全生命周期TCO中,燃油成本占比达35%,对于物流重卡来说,其燃油经济性较低,在现阶段能源消耗如此剧烈的今天显然是急需解决的问题。而如何降低油耗,也成为商用车供需两端的共同关注点。2020年底,我国提出2030年实现碳达峰和2060年碳中和的3060目标,物流重卡作为燃油和碳排大户,提升燃油效率、降低油耗水平势在必行。PACC预见性自适应巡航因在节油及行车安全方面具有较高优势,逐渐成为车企追捧的技术,对于现阶段的能源消耗的减少将起到重大积极的意义。
本文想深入阐明一下当下火热的PACC技术,并就此采访了宏景智驾的相关技术人员,利用实际数据来验证是否PACC真的能够辅助驾驶员驾驶,起到节约油耗的作用,以及具体的节油率能够达到多少。
图片
1、PACC介绍
PACC预见性自适应巡航是基于ADAS地图和ACC自适应巡航,通过获取前方道路的坡度、曲率、限速等道路信息,并进行地形匹配,按照最优算法控制发动机和变速箱,主动实现对车辆车速、挡位等的最优控制。
现如今很多Tire 1都宣称自己的PACC在跟车的同时实现节油率达到10%甚至以上,然而真实数据果真如此吗?为还原PACC节油率的真实情况,智车科技采访了宏景智驾的相关负责人,运用实际数据加理论计算,将PACC功能和有多年驾驶经验的老司机对比,来验证PACC是否真能达到10%以上如此高的节油率。
2、人工驾驶实测数据分析
本次测试的实验场地设置为宏景智驾与某头部物流公司的战略运营线路,起点为该物流公司上海浦东分拨/松江分拨,终点为该物流公司南昌县物流中心,全程共计730-800km,具体线路如下图所示。运营车辆为某OEM重卡,总重量为40吨左右。


本次数据为专门做经济性测试的15-20年驾龄的老司机以实现最优油耗手动驾驶的展示,录制数据中,全程为801km,高速数据记录里程为733km。
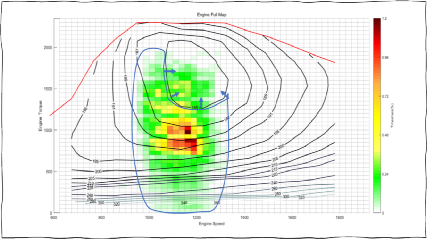
根据行驶中的发动机转速和扭矩,将其绘制到发动机的万有特性上,可以直观的看到人类老司机的驾驶行为,根据绘图结果显示大部分的工况点落在发动机高效区域。
滑行可以有效的降低油耗,变速箱允许空挡滑行和在档滑行,分别统计两个滑行模式所占的比例,但AMT变速箱本身选档并不受驾驶员直接控制,因此暂排除采用更优秀的换挡逻辑所能带来的油耗优化。
对于道路上的坡度、车流量、拥堵情况等复杂道路情况,经验丰富的驾驶员拥有更加优秀的环境感知能力和预测能力,车速的波动,刹车方式都体现了人类司机对客观世界的反馈,在现实世界中预测性自动驾驶系统应趋向于类似于上述老司机的驾驶行为。

上图为某OEM汽车经验丰富老司机为了展示手动驾驶最优油耗而做的demo,从中可以看到,当经验丰富的驾驶员以实现低油耗的方式驾驶时,发动机大部分的运行时间处在高效率区间(比油耗BSFC < 195g/kwh),这就表明驾龄15年以上的老司机如果为了追求省油的方式驾驶,留给预测性自动驾驶的省油空间已经很小了。
同时我们还根据时间占比统计了所有运行点的比例,可以看到相对低效点(如>195g/kwh)的运行时长占比约10.8%,大部分运行区间处于次优的185-195g/kwh区间。

3、完全理想的降油耗分析
对老驾驶员的驾驶数据进行了详细的分析后,我们发现如果在此基础上再实现理想的降油耗,便需要在下图中将蓝色区域的工况点向最高效区间转移,即要保证下面两个方面:
1). 发动机没有转速和扭矩的瞬态变化,一直处于稳态工作(不可能实现)。
2). 发动机一直处于最高效区间(即图中 < 185g/KW.h的比油耗区间,非混合动力化的传统动力总成不可能实现)。
按照上图的最完美发动机工况点转移理论,我们得到最理想情况下预测性自适应巡航相比于经验丰富驾驶员的节油率(假定在同样路况下,自动驾驶的刹车行为和老司机一样,但现实中基本做不到)。

综上所述,即使在不可能实现的完美控制策略下,从提升发动机效率的角度来看,相对于经验丰富老司机的驾驶基础上,节油率的极限天花板为7%左右,此节油率基于上述不可能实现的运行工况。
并且在运营中的刹车控制方面,自动驾驶系统的感知能力也做不到和驾驶员一样精密,整车的刹车行为很难追平老司机为刻意降低油耗而采取的驾驶风格,因此不可能在老司机驾驶油耗基础上实现超过10%的节油率,正常来说,相比20年驾龄老司机,最多可以实现4-5%的节油率。
4、PACC预测性自适应巡航运营数据分析
有上述的理论基础后,我们也收集了PACC预测性自适应巡航运营的数据,并对此进行了详尽的分析。在此实验中,采用的发动机型号、变速箱型号以及运营路段如下表所示。

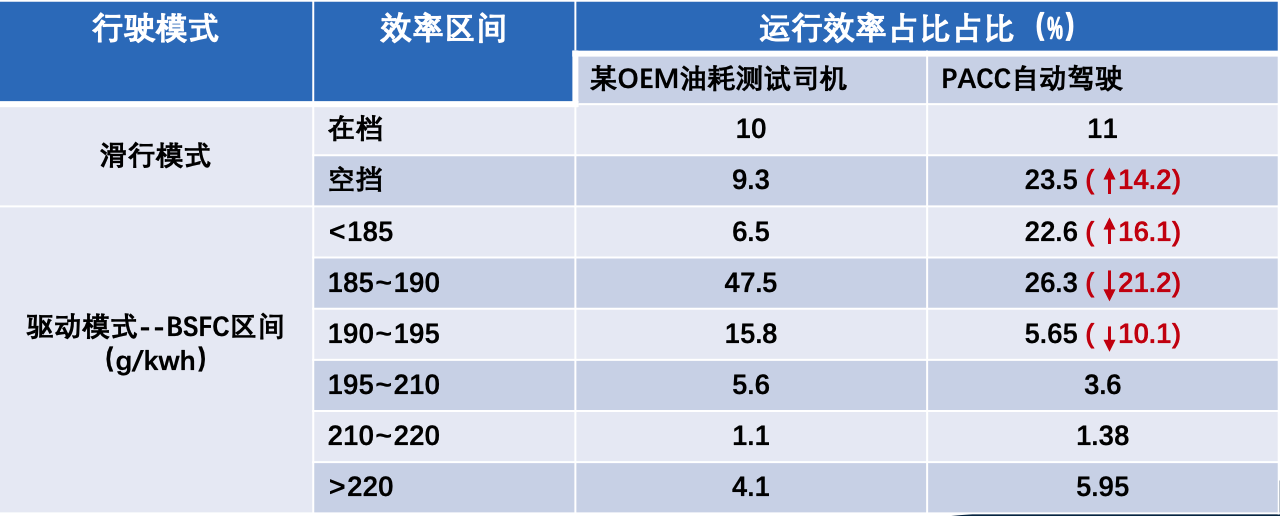
将PACC自适应巡航发动机运行图与某OEM经济性测试司机手工驾驶发动机运行图进行对比,可以看到,PACC 明显将发动机运行区间往高效率区间提升,并且发动机转速分布区间更加集中。


同时,PACC大幅提升了发动机最高效区间(<185g/kw.h)的运行占比(6.5% ->22.6%),减少了190-195g/kw.h的运行占比(15.8% -> 5.7%), 并且大幅度增加了空挡滑行的开启率 (9.3-> 23.5%)。
具体测试人工司机与PACC 自动驾驶的数据对比如下表所示,实际节油率近4%。

5、总结与展望
通过本次采访获悉,宏景智驾PACC项目历时4个月,阶段性完成电子视野重构、全程经济车速规划、预测性车速滑行一体式规划算法并发以及算法测试验证,最终实现运营线路平均节油率3%,选定线路平均节油率超过5%。

在未来,宏景智驾的PACC算法的新功能开发计划包括:
1.商用车运营中,大城市高速路段存在大量拥堵路段,自动驾驶卡车大部分处于跟车模式而非巡航模式,针对占比超过一半的跟车模式,用合适的边界条件约束动态规划从而增加预测性算法开启比例。
2.针对上述跟车模式,开发预测性车距控制以实现脉冲滑行功能提升节油潜力。
3.为适配不同品牌,不同配置和不同尺寸的卡车,开发以下两个新算法用以改善车辆未来2-3km距离内车速轨迹预测的精度,从而提升节油性能:
车重估算算法,从而不再需要装配轴荷传感器/车重传感器,依然能获得较准确的整车重量。
车辆行驶阻力自学习算法,能较准确的拟合出车辆在不同运行情况下的行驶阻力系数。
从数据结果分析,PACC可实现3-5%的节油率是一个非常客观且符合当下行业普遍认知的结论。现如今,PACC功能对车辆的基础配置有一定要求,必须具备ACC功能及获取ADAS地图的联网功能,因此PACC目前多搭载高端重卡车型。随着技术发展和成本下降,未来必然可搭载在更多的车型上。更重要的是,我们期待随着PACC算法的更新迭代带给我们更多的惊喜。



编辑推荐




最新资讯
-
imc/GRAS/AP首次联袂亮相ATE India 盛会
2025-04-11 13:49
-
GB/T 31486-2024 与 GB/T 31484-2015 修改
2025-04-11 13:48
-
标准介绍丨ASAM ARTI 运行实时接口
2025-04-11 10:29
-
自动驾驶中基于深度学习的雷达与视觉融合用
2025-04-11 10:25
-
标准研究丨《汽车开闭件性能要求和试验方法
2025-04-11 10:24
