




 广告
广告





















































硬件预埋已成趋势,车企数据闭环如何做?

“很多车企通过硬件预埋实现L2+的自动驾驶功能,并通过影子模式和云端数据闭环迭代最终达到L3功能的可靠量产。”在第六届i-VISTA智能网联汽车国际研讨会(线上)上,NI中国区业务拓展经理王帅如是说,并针对这一趋势带来的海量数据处理需求,深入讲解了NI的基于数据闭环的测试方法。我们来回顾一下要点。
硬件预埋对数据处理能力提出新要求
硬件预埋是自动驾驶趋势下车企采取的新模式,即通过在车内进行硬件预埋,后续汽车只需通过不断地升级软件,用户就可以获得更好的使用体验。硬件预埋主要涉及到汽车总线架构、感知能力、运算能力、控制能力等。
目前市场上具有L2或者L2+功能的车,普遍都配置800万像素的高清摄像头、4D成像雷达、200-1000Tops的算力,这些对于L2/L2+功能是富余的。但是这种方法的好处也不言而喻,通过这种硬件预埋的方法,车企可以提前获取更多的数据资源,为后面向L3迭代做好数据储备。
这里再简单说明一下自动驾驶行业的另一趋势“影子模式”,“影子模式”的原理是,让汽车的自动驾驶软件处于开启状态,传感器探测车辆行驶道路周围的数据,但驾驶操作完全由人来完成,机器不参与驾驶。在人的驾驶过程中,机器就能学习人的驾驶操作,从而达到提升自动驾驶能力的目的。
在这两大趋势的带动下,尤其是硬件预埋技术的应用,给车企预留了更多的数据采集和训练的时间,当然也催生了海量的数据处理需求,对数据采集/存储/处理方法提出了新的挑战。
王帅指出:“OEM希望不断采集车辆的路试数据来实现自动驾驶算法的持续迭代和升级。包括采集研发阶段的case和量产阶段的长尾case,然后不断地丰富数据集,为L2快速向L3迭代做好准备。在这个过程中,NI会帮助客户实现数据闭环,充分挖掘数据的价值。”
本次演讲的完整版PPT下载看这里

∆扫码下载NI专家演讲PPT
只需5步,实现数NI提出数据采集/处理5步法,打造数据闭环:
-
道路测试
-
大数据管理
-
场景虚拟化
-
数据开环回灌
-
数据闭环
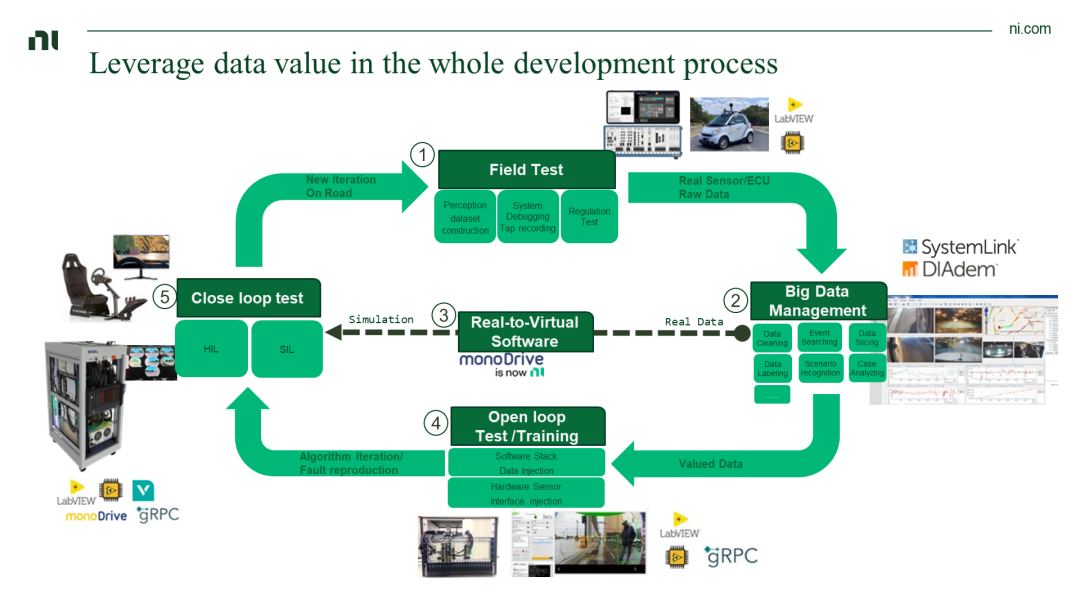
从数据采集到数据闭环,就5步
简单来说,数据闭环包含这些环节:数据挖掘——数据清洗分类——数据标注——数据训练/学习等。接下来,我们将逐一讲解每个步骤NI的解决方案。
1
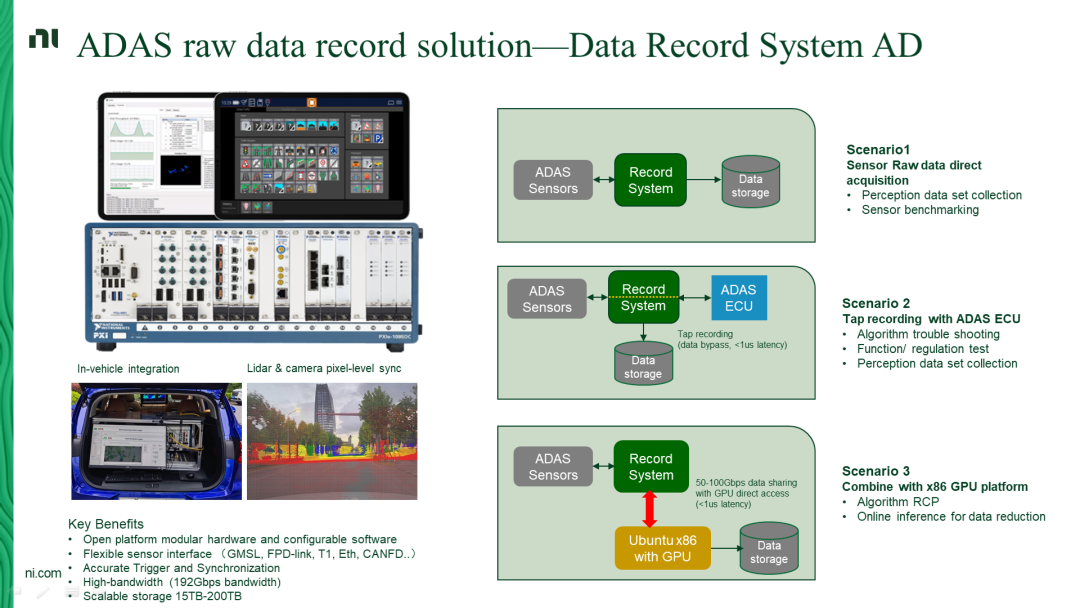
道路测试——Data Record System AD
道路测试是收集真实场景数据的重要来源,无论是车内通信还是车路通信,都需要处理大批量的数据,自动测试系统中一般需要配备数据采集同步和存储设备。
NI提供的基于PXI平台的模块化数据采集方案,可以满足多路摄像头、车载以太网、CAN/CANFD、GPS等的数据采集,还能满足不断阶段的数据采集需求。比如,ADAS域控制器已经基本在研发和迭代的阶段,可以通过数据旁通采集的方法,将NI测试设备作为一个中间件,从中间把数据采集回来,这样就不会破坏掉传感器到ECU的数据链路。此外,NI的解决方案支持15TB~200TB的数据存储容量。
2
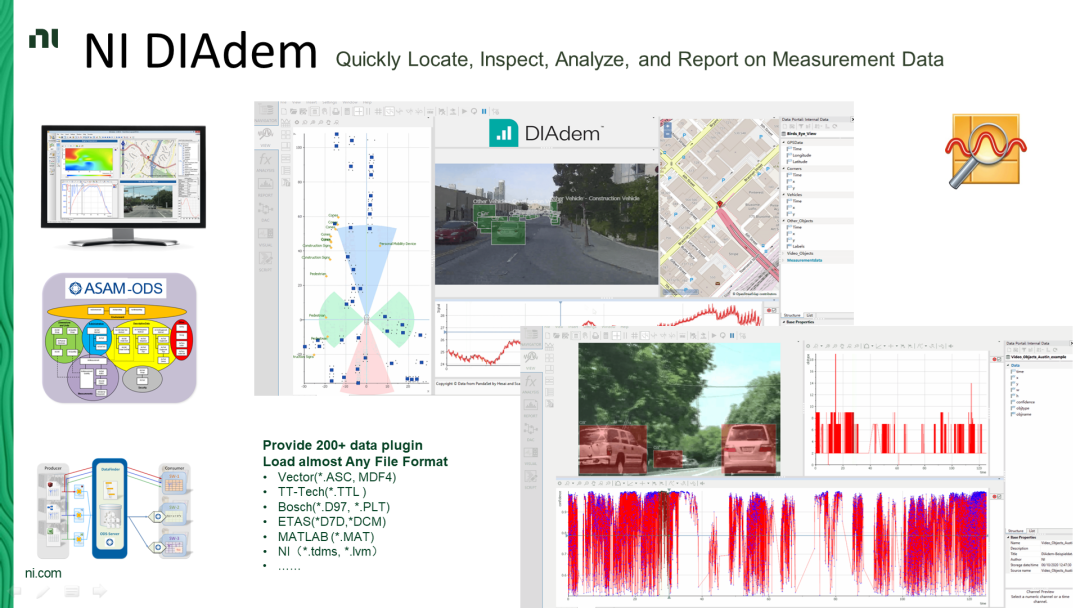
大数据管理——DIAdem
从流程上说,大数据管理分为车队管理、数据中心、终端数据使用三部分。
从车端向数据中心传输数据的过程中,普遍采用的是数据搬移等回传方式,数据量可达到10-100TB/每辆车/每天。反过来,数据中心还能对车端实时监测,这部分主要是通过车载4G 或者5G网络完成,同时利用 NI的Systemlink软件,用户可以在数据中心里开发一个数据看板更方便地监视车队运行的状况。除此之外,NI也在联合强大的生态圈为车企提供精准高效的数据管理工具,NI在云端可以提供基于OPTIMAL+ 的大数据生命周期管理工具、基于monoDrive 的云仿真工具链,NI跟Foretellix也有深度的合作。
除了这些基于云的工具之外,这里再强调一个数据挖掘神器——DIAdem。它可以部署在云端,针对路试数据、多源的数据图像、点云的以及一些总线的数据实现相应的数据可视化和数据挖掘的工作。DIAdem可提供200+数据插件,兼容多种类型的测试厂商的数据格式,比如说ASC, MDF4、TTL、MAT 等。
3
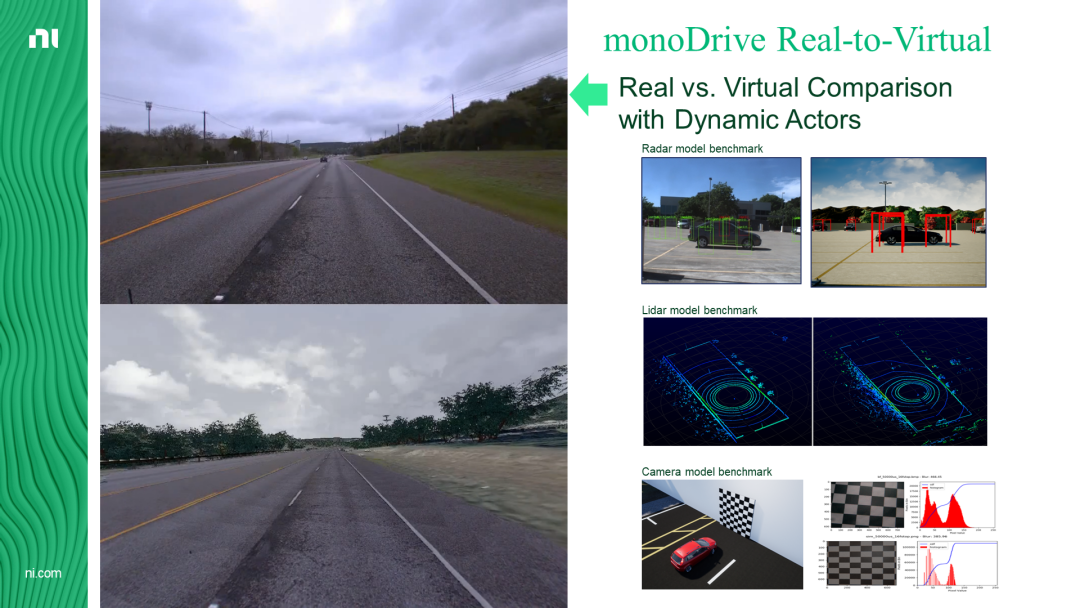
场景虚拟化——monoDrive
通过道路试验采集数据之后,就要对数据进行清洗分类、场景选择,最后将真实道路试验和虚拟仿真试验结合在一起。monoDrive就是这样的工具,可以实现高保真的传感器物理建模,场景语义分割,同时还支持云仿真的功能,可以把大量的测试用例,部署到云上面,来加速仿真的进度。monoDrive的另外一个重要优势是realto virtual场景自动生成的扩展功能。
值得一提的是,在场景重建或者是传感器建模的过程中,NI可以把真实的传感器数据跟虚拟的传感器数据做相应的标注。
4
数据开环回灌——基于PXI平台的系统架构
这个步骤要做的是把原始数据回灌到ADAS感知软件中,一部分是直接回灌到software stack 去做一些软件回灌,主要是针对一些模型的测试部分。还有一部分是直接回灌到真实的ECU,这可以更真实地复现我们在路试过程中去发现的一些情况。
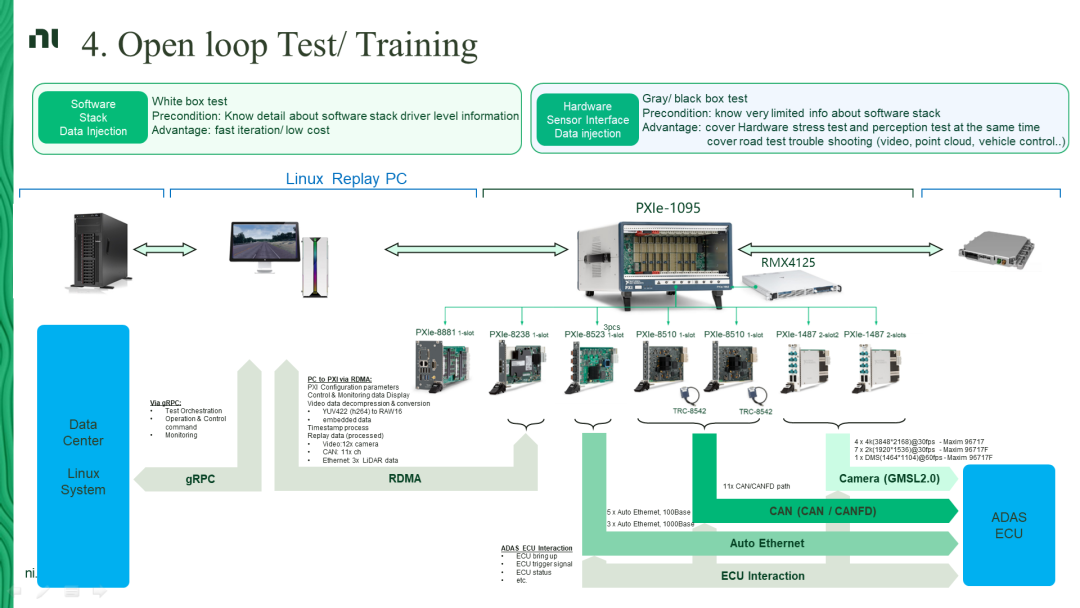
NI系统架构的组成:用户数据中心、基于Linux 平台的Replay PC、NI PXI 平台
为了形成一个数据闭环,充分利用原始数据的价值,越来越多的车企都在构建这样的一个集群式数据回灌系统。很多车企在定义AEB功能的时候,通常他们会要求AEB 功能是10万公里或者 20万公里不能产生误触发。
举一个例子——
假如在路试的过程中跑了8万公里,突然产生了一次误触发,这个时候就要回去修改相应的软件。修改软件之后,是否还需要再重新跑一个10 万公里呢?显然重头来做会浪费大量的额时间和经历。
面对这样的挑战,有什么有效的方法呢?
王帅解释道:“如果在第一次路试时候跑到8万公里发生了问题,但是能保证前面的里程的数据都被记录下来了。那么一旦发现了问题之后,我们去迭代修改软件。修改软件之后,我们就利用原来采集的原始数据去做一个回归测试,测试一下软件修改之后在原来的这些数据上面能不能正常的运行。这就减少了我们在路试上的投入,从而加快开发速度。”
5
闭环测试——SIL和HIL
闭环测试通常包括软件在环(SIL)和硬件在环(HIL)。在软件在环这块,NI的方案是利用monoDrive平台提供一个可以实现在云上批量部署的环境。在硬件在环这块,NI的方案是利用PXI平台,同时利用NI在摄像头、车载总线,及数据同步等方面的优势实现多种类型传感器的带有数据注入功能的闭环系统。
更多内容,请下载专家演讲PPT查看
∆扫码下载NI专家演讲PPT
- 下一篇:电机讲解丨油冷电机
- 上一篇:nCode 2022新版本发布通知







最新资讯
-
风噪测试在电动汽车时代的关键作用
2025-04-29 11:34
-
汉航车辆性能测试系列之操纵稳定性测试--汉
2025-04-29 11:09
-
新能源汽车热管理系统验证体系PITMS正式发
2025-04-29 11:09
-
试验载荷谱采集
2025-04-29 11:07
-
APx500 软件演示模式 (Demo Mode) 竟有这些
2025-04-29 08:37
