




 广告
广告





















































自动驾驶的中心舞台:成像雷达客户需求、技术趋势及市场前景

随着高阶自动驾驶量产时代的逐步到来,如何在新架构下实现系统功能的完美破局,将整体功能体验和性能提升到一个新高度是自动驾驶研发人需要重点突破的问题。
“感知”是自动驾驶的核心功能,随着自动驾驶等级的提升,对于“感知”性能的要求也越来越高。其中,由于“4D成像雷达”在保留了普通雷达测距测速精度高、能够全天候工作的优点之外,还能够极大的提升测角分辨率,增加高度信息的测量,越来越受到行业关注。
近期,就高阶自动驾驶系统集成及开发的话题,我们与智能驾驶企业福瑞泰克从客户需求、技术趋势和市场应用这几个角度进行了深入交流,以下为对谈总结:
一
客户需要什么样的雷达?
毫米波雷达在汽车上的应用已经超过了30年,到目前为止也是智能驾驶汽车的关键感知器件。
随着雷达应用越来越广泛,以及智能驾驶性能的逐渐提升,传统毫米波雷达的劣势也逐渐显现,例如:缺乏测高能力、角度分辨率低、点云稀疏且忽略静态物体,这些特征限制了毫米波在复杂场景下的应用。
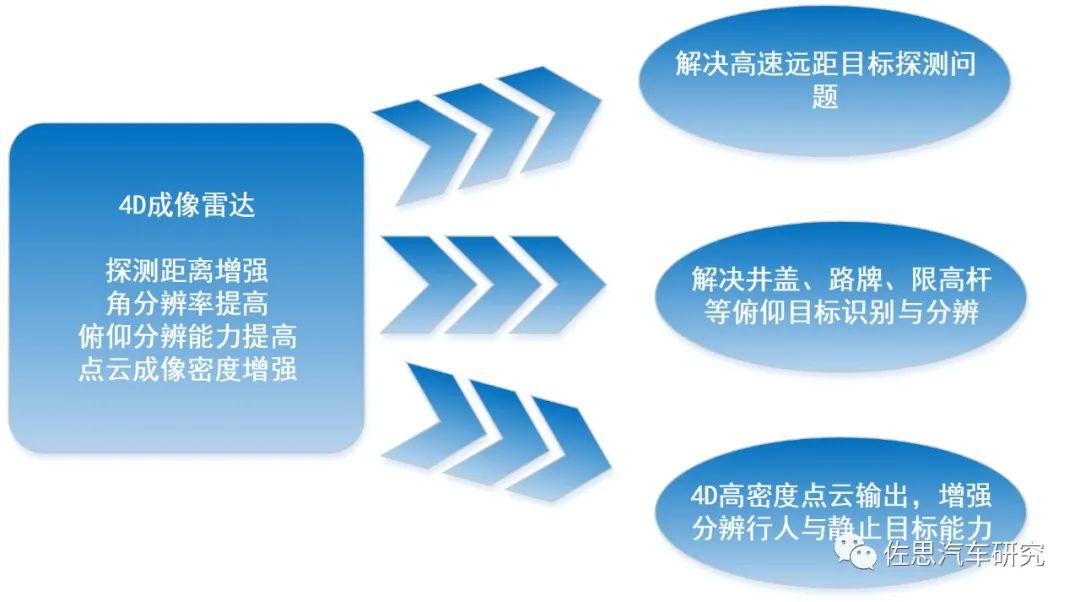
相比传统毫米波雷达,成像雷达采用了更多的发射接收通道,实现虚拟通道数几何倍数增长,更多的通道数参与俯仰、方位测角,使得测高能力、角分辨率精度、点云密度显著提升,随着感知性能全面提升,4D成像毫米波雷达将成为高阶自动驾驶的不可或缺一部分。
二
4D成像雷达技术优势:
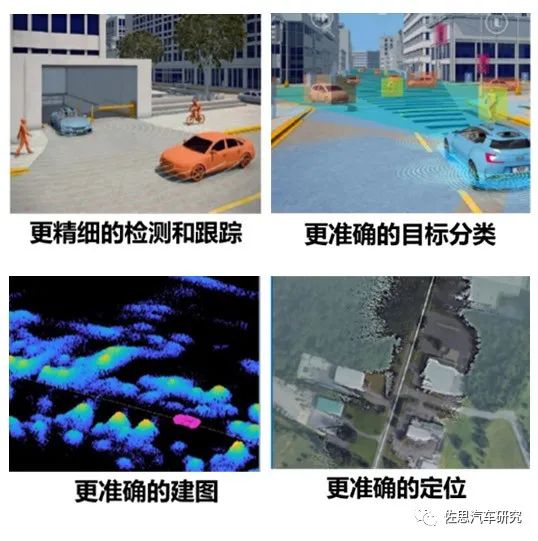
成像雷达通过实现更精细的检测和跟踪、更准确的目标分类、更精确的建图和定位提升自动驾驶系统在各类复杂城区道路的可靠性与安全性。其次,成像雷达可以建立较精确的动态可通行区域,能够防止车辆的碰撞,剐蹭等安全事故,尤其是能够有效感知到悬空目标,如限高杆、龙门架等等。以下详细介绍了成像雷达的各项优势技术指标:
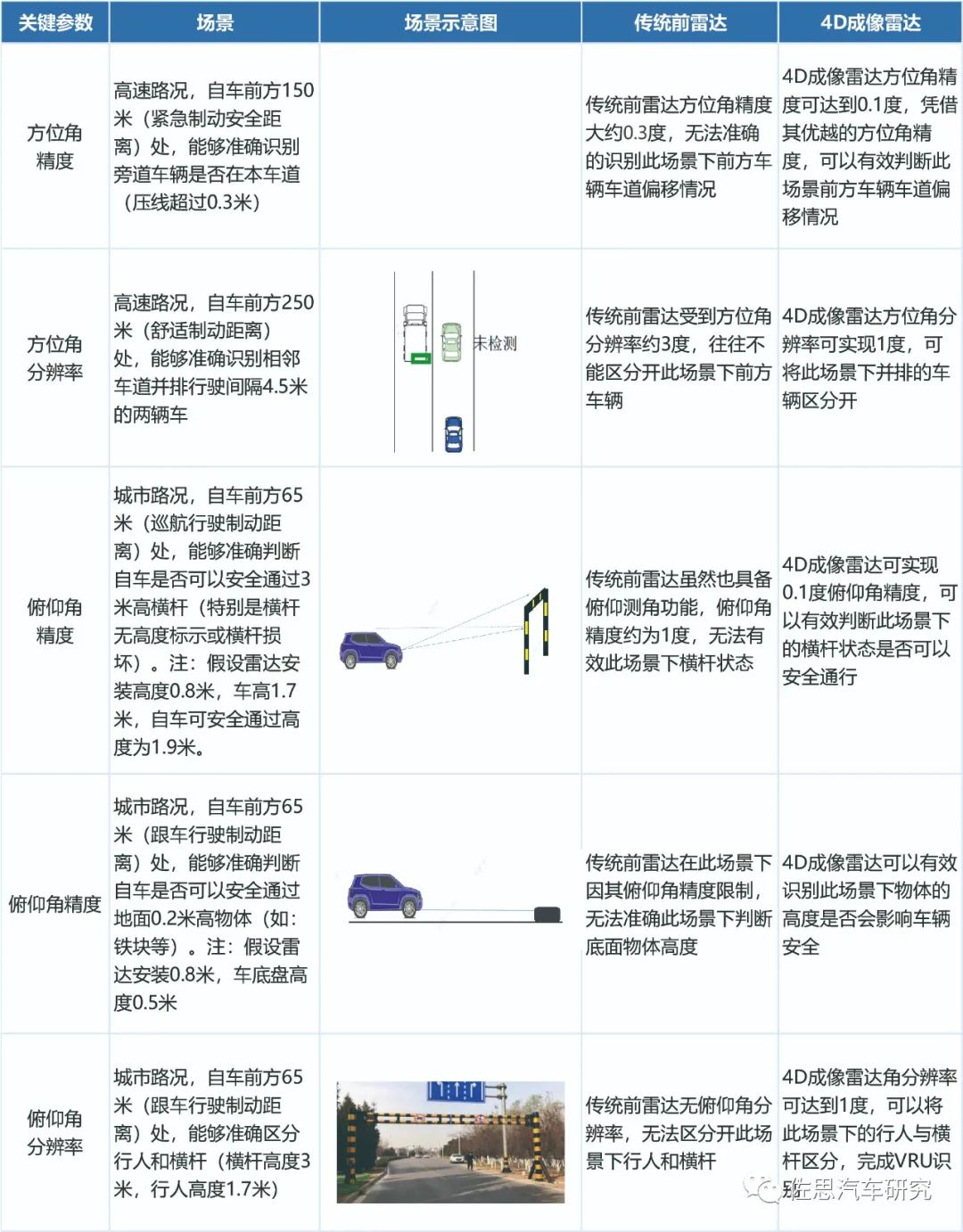
随着汽车行业告别“功能机”走向“智能机”时代,面对日益复杂的交通场景,现阶段域控制器将承担起自动驾驶系统“中央大脑”的平台角色不断发挥传感器、芯片、软件、算法等各自的优势。因此,域控制器对毫米波雷达的感知性能需求也提出了更高要求,而4D前雷达在角精度和角分辨率的优势也在复杂的场景中体现出来:
若域控制器需要自车前方200米处的目标车辆行驶车道偏移位置信息进行决策,传统前雷达方位角精度约在0.3度,判断此场景下目标车辆车道会产生较大位置误差,目标车辆真实偏移情况无法准确判断;4D成像雷达方位角精度能达到0.1度,相比传统前雷达方位提升3倍,可以将200米处更加精确车辆车道偏移信息输出到域控制器。
若需要自车前方100米处并排行驶的大小两个目标车辆信息,传统前雷达方位角分辨率约3度,会造成此场景下前方的大小车信息无法区分开,误将两辆车识别成一个目标;4D成像雷达方位角分辨率可达1度,相比传统前雷达提升3倍,可将此场景下大小车辆区分成两个目标输出给域控制器。
若域控制器需要车辆前方的静止横杆、井盖、地面障碍物等信息进行决策时,传统前雷达俯仰角精度约1度,某些场景横杆高度信息误差较大,井盖与地面障碍物高度信息误差较大;而4D成像雷达俯仰角精度可达0.1度,相比传统前雷达提升10倍,可将障碍物的精确高度信息输出到域控制器。
若存在多个静止障碍物或人的情况下,传统前雷达无俯仰角分辨率,不能准确将人、障碍物、横杆区分开来,而4D成像雷达将俯仰角分辨率可达1度,能够区分出多个目标特征,输出给域控制器。
这种情况下,4D成像毫米波雷达的特性优势就能很好的发挥出来。普通雷达与4D成像雷达的技术参数横向比较如下:

三
成像雷达应用趋势
前融合趋势
-
现在的车身架构正在走向集成式,感知融合和控制融合的发展方向。多传感器融合的趋势下,成像雷达和其它传感器做前融合,起到1+1>2的作用
-
此外,成像雷达在L3以上的系统中可以提供冗余备份,因其受天气影响小,自身探测更稳定可靠
图像级成像雷达
-
图像级成像雷达首先是方位和俯仰分辨率都很高,达到1度以内,例如0.5度甚至0.1度
-
图像级成像雷达对同距同速下目标个数容量很大
目标分类和识别
-
目标输出包含目标的位置、速度、加速度、目标属性分类等参数,目标类别包含:大卡车、小轿车、龙门架、护栏、两轮车、行人、其他等属性。点云以及目标输出在典型场景下不误报不漏报,具备井盖识别能力和道路间接缝的识别能力,但是要过滤掉。
前向雷达中国市场增长非常快,目前有不少咨询公司曾给出预测,2023年中国市场会增长到全球最大的前向雷达市场。福瑞泰克作为国内全栈式智能驾驶解决方案及产品供应商,面向客户的业务需求,通过量产飞轮带动高阶自动驾驶平台加速技术及产品创新,随需而变提供极致灵活的解决方案,包括多传感器组合、辅助及自动驾驶域控制器及SOA软件平台产品等。据了解,福瑞泰克开发的成像毫米波雷达水平角分辨率和俯仰角分辨率都小于1°,探测距离超过350米,速度分辨率小于0.1m/s。
毫米波雷达是一门多学科交叉的技术,福瑞泰克特别注重架构上的创新,包括主芯片、波形设计、布阵设计、数据流和算法框架,独创的波形和算法设计,实现高性能的成像效果,同时极具成本优势。福瑞泰克第四代雷达产品,通过系统性地把设计射频、天线、信号处理、数据处理融会贯通起来,输出更丰富的状态变量,使雷达的探测更稳定,提升有效利用率,从而实现在相同的硬件和模块上,整体性能更有竞争力。
- 下一篇:博世自动驾驶的“改革开放”
- 上一篇:传递路径分析在变速箱NVH开发中的应用



编辑推荐




最新资讯
-
沃尔沃汽车:创新驱动的豪华品牌
2025-04-24 18:16
-
飞书项目落地ASPICE解决方案,助力汽车软件
2025-04-24 09:59
-
驾驶员监控系统DMS合规认证的“中西结合”
2025-04-24 08:23
-
自动驾驶汽车测试关键行人场景生成
2025-04-23 17:12
-
R171.01对DCAS的要求⑧
2025-04-23 17:08
