




 广告
广告





















































数据驱动的动态系统(Dynamical System)建模(一):深度学习

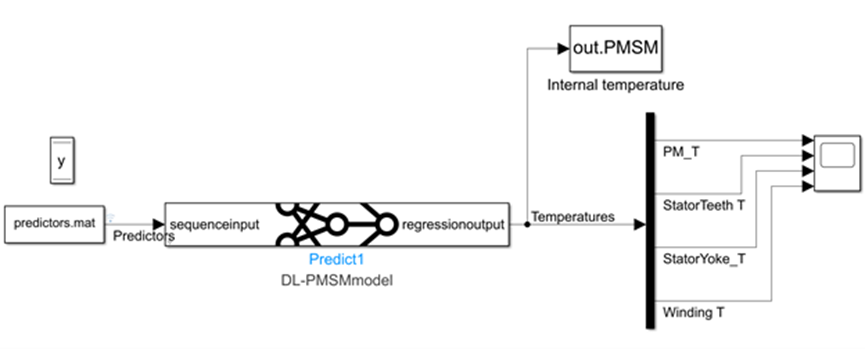
我们将训练好的模型保存为 .mat 文件,并将其导入 Simulink Deep Neural Network Predict 模块[链接9],这样我们就有了一个只有 50Kbyte 大小可以预测温度的代理模型(Surrogate Model)用于仿真。
Neural Ordinary Differential Equations:神经网络 ODE
这是 NIPS 2018 年最佳论文[2]提出的一种新的网络层。当然这个要理论上介绍还是比较复杂,我们可以通过应用场景直观的解释一些 Neural ODE 如何实现动态系统建模。
试想我们有一个动态系统,因为系统动力学过于复杂,我们没有真正的物理模型,但我们可以不断地通过测量得到系统的初始状态 y(t0),动态输 入 u(t0), u(t1),…, 与动态输出 y(t1),y(t2),…,y(tn)。接下来我们想是否可以实现这样一个微分方程:

使得这个微分方程正好代表了我们的系统,也就是说在系统输入 y(t0) 的初始条件下通过求解(例如使用 ode45)这个微分方程得出的解 yp(t) 和我们实测结果是吻合的。但如何基于已有的数据 y(t0),序列 u(t) 和序列 y(t) 得到 f 呢?如果我们将 f 用一个神经网络 F(θ) 替代,即

我们现在有数据 u(t), y(t)。我们不断地利用数据训练参数θ,使得上述方程的解 yp(t1), yp(t2),...,yp(tn) 与实测 y(t)是吻合的,那就可以得到这个动态系统的微分方程模型了,从而可以用于后续系统仿真与预测。如何理解 yp(t) 与实测 y(t) 的接近度,也就是损失函数? 我们简单介绍一下训练时 Loss 函数计算。对于方程,我们在知道系统初始状态 y(t0),可以通过很多数值积分求解器(例如常用的 ode45)得到任何时刻的推断输出 yp(t) (当然前提是系统的输入 u(t)也是已知).
即

θ 是神经网络 F 的静态参数。对于所有时刻都是不变的。我们就可以方便得到损失函数的值

其中 L 可以是任何自定义的损失函数。于是我们可以进行参数 θ 的训练。当然关于梯度计算与反向传播会有相对复杂的数学推导,论文提出了伴随方法(Adjoint Method)来实现这一过程,此处不做详细论述。
对应于上述过程,MATLAB中提供了dlode45 [链接10],用于建模方程右侧非线性函数F的同时,计算 ODE 的时序解。
即 dlode45 接收一个含参神经网络 F(θ)、需要计算输出结果的时刻序列 [t0, t1,…,tN]、系统的 t0 时刻的初始状态 yt0、神经网络参数的一组值,就可以计算出时刻 [t1,…,tN] 所对应的输出状态。
使用 Neural ODE 为系统建模示例
我们通过一个示例介绍如何使用Neural ODE为动态系统建模。[链接6]
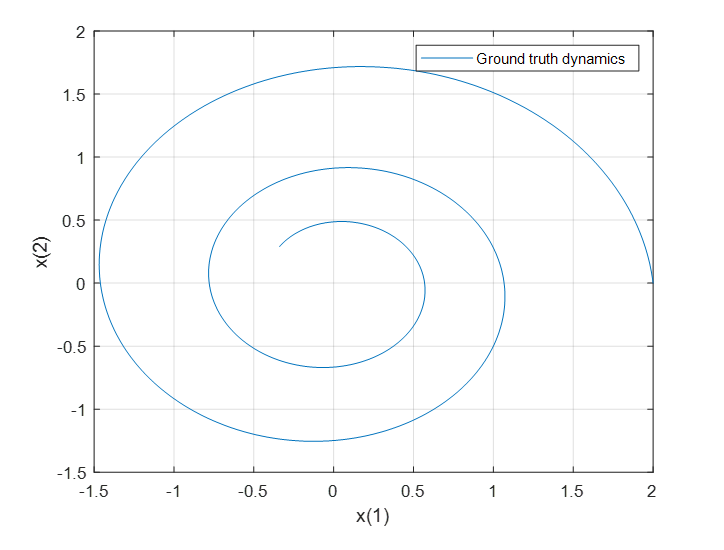
我们就借用文章刚开始的简单二自由度线性系统,x' (t)=Ax(t), 其中A是一个 2x2 的矩阵。我们用这个已知的系统产生一些数据,利用这些数据来训练一个 Neural ODE 的方程,使得这个基于数据训练好的系统(Neural ODE 方程)能够接近已知的这个动态系统。
生成物理系统的数据 xTrain 作为真值
x0 = [2; 0];
A = [-0.1 -1; 1-0.1];
trueModel = @(t,y)A*y;
[~, xTrain] =ode45(trueModel, t, x0, odeOptions);
xTrain 两个自由度的可视化
定义和初始化神经网络 F(t,x(t),θ) 的参数 θ
neuralOdeParameters.fc1= struct;
sz = [hiddenSizestateSize];
neuralOdeParameters.fc1.Weights= initializeGlorot(sz, hiddenSize, stateSize);
neuralOdeParameters.fc1.Bias = initializeZeros([hiddenSize 1]);
neuralOdeParameters.fc1
ans = 包含以下字段的 struct:
Weights: [20×2 dlarray]
Bias: [20×1 dlarray]
同样
neuralOdeParameters.fc2
ans = 包含以下字段的 struct:
Weights: [2×20 dlarray]
Bias: [2×1 dlarray]
定义神经网络模型 F(t,x(t),θ) 函数
function y = odeModel(~,y,theta)
y =tanh(theta.fc1.Weights*y + theta.fc1.Bias);
y =theta.fc2.Weights*y + theta.fc2.Bias;
end
结合定义好的 F(t,x(t),θ) 作为 dlode45 的输入来构建代理模型函数
function X =model(tspan,X0,neuralOdeParameters)
X = dlode45(@odeModel,tspan,X0,neuralOdeParameters,DataFormat="CB");
end
定义模型梯度函数
主要用于训练过程计算损失以及对应待训练参数的梯度
function [gradients,loss] =modelGradients(tspan,dlX0,neuralOdeParameters,targets)
% Compute predictions.
dlX = model(tspan,dlX0,neuralOdeParameters);
% Compute L1 loss.
loss =l1loss(dlX,targets,NormalizationFactor="all-elements",DataFormat="CBT");
% Compute gradients.
gradients =dlgradient(loss,neuralOdeParameters);
end
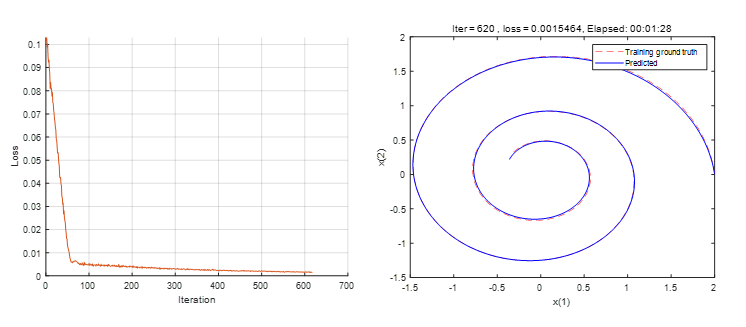
训练模型
不断地迭代训练,创建 miniBatch,并进行损失函数计算和自动微分,通过调用 adam 求解器进行参数学习
for iter=1:numIter
% Create batch
[dlx0, targets] = createMiniBatch(numTrainingTimesteps,neuralOdeTimesteps, miniBatchSize, xTrain);
% evaluatenetwork and compute gradients
[grads,loss] = dlfeval(@modelGradients,timesteps,dlx0,neuralOdeParameters,targets);
% Update network
[neuralOdeParameters,averageGrad,averageSqGrad] =adamupdate(neuralOdeParameters,grads,averageGrad,averageSqGrad,iter,...
learnRate,gradDecay,sqGradDecay);
% Plot loss
currentLoss =double(extractdata(loss));
…
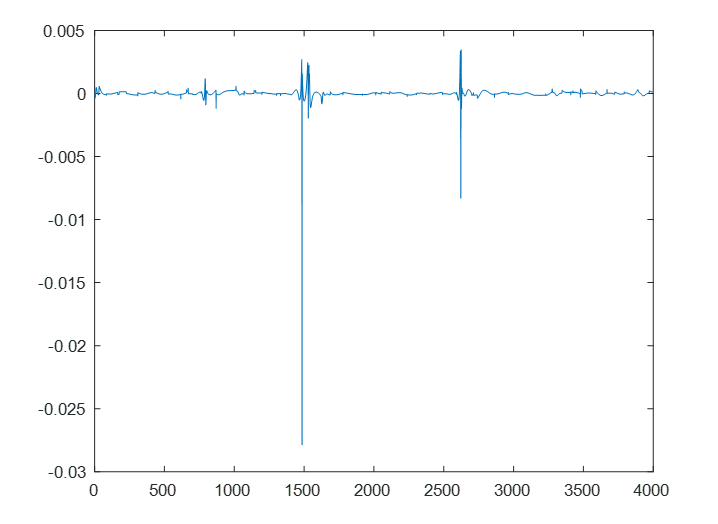
测试模型
选取新的初始条件作为训练好的模型的输入,来进行和物理系统输出的对比
x0Pred1 =sqrt([2;2]);
x0Pred2 =[-1;-1.5];
x0Pred3 = [0;2];
x0Pred4 = [-2;0];
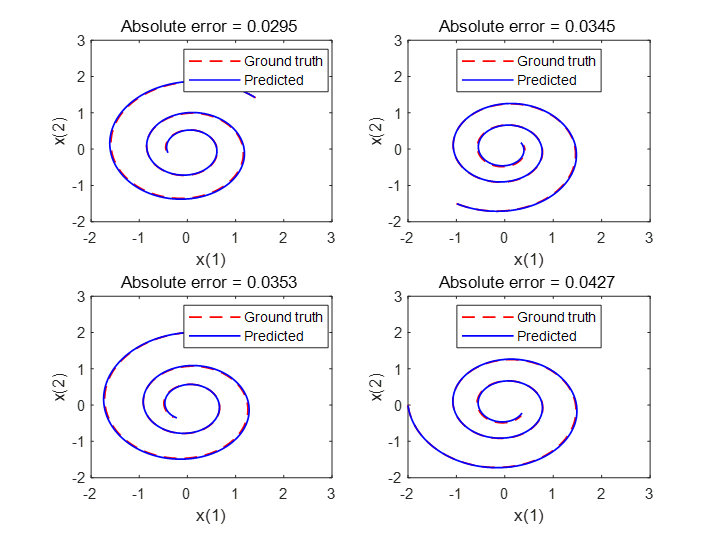
可以看到模型对于新的初始条件依然表现优异。因此神经网络 ODE 在构建动态系统上很有潜力,目前在发动机建模上也有一些示例应用。
- 下一篇:电流测量方法大揭秘
- 上一篇:强域控、超感知的均胜电子智能驾驶域控平台



编辑推荐




最新资讯
-
自动驾驶卡车创企Kodiak 将通过SPAC方式上
2025-04-19 20:36
-
编队行驶卡车仍在奔跑
2025-04-19 20:29
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
