




 广告
广告





















































CODA:自动驾驶中道路目标检测的极端情况数据集

2022年3月arXiv论文“CODA: A Real-World Road Corner Case Dataset for Object Detection in Autonomous Driving“,华为和香港、广州两所大学一起发表。

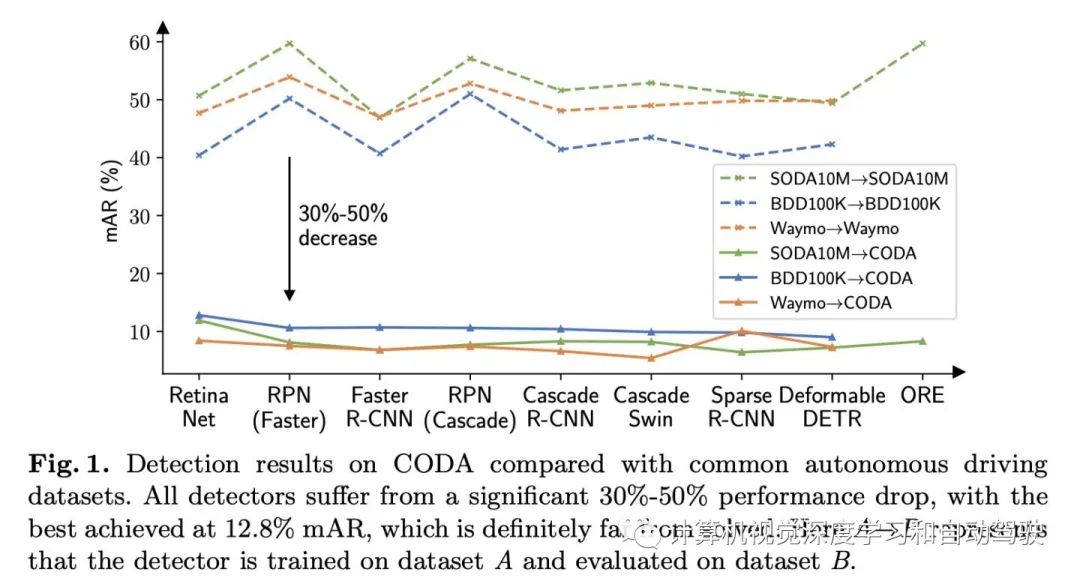
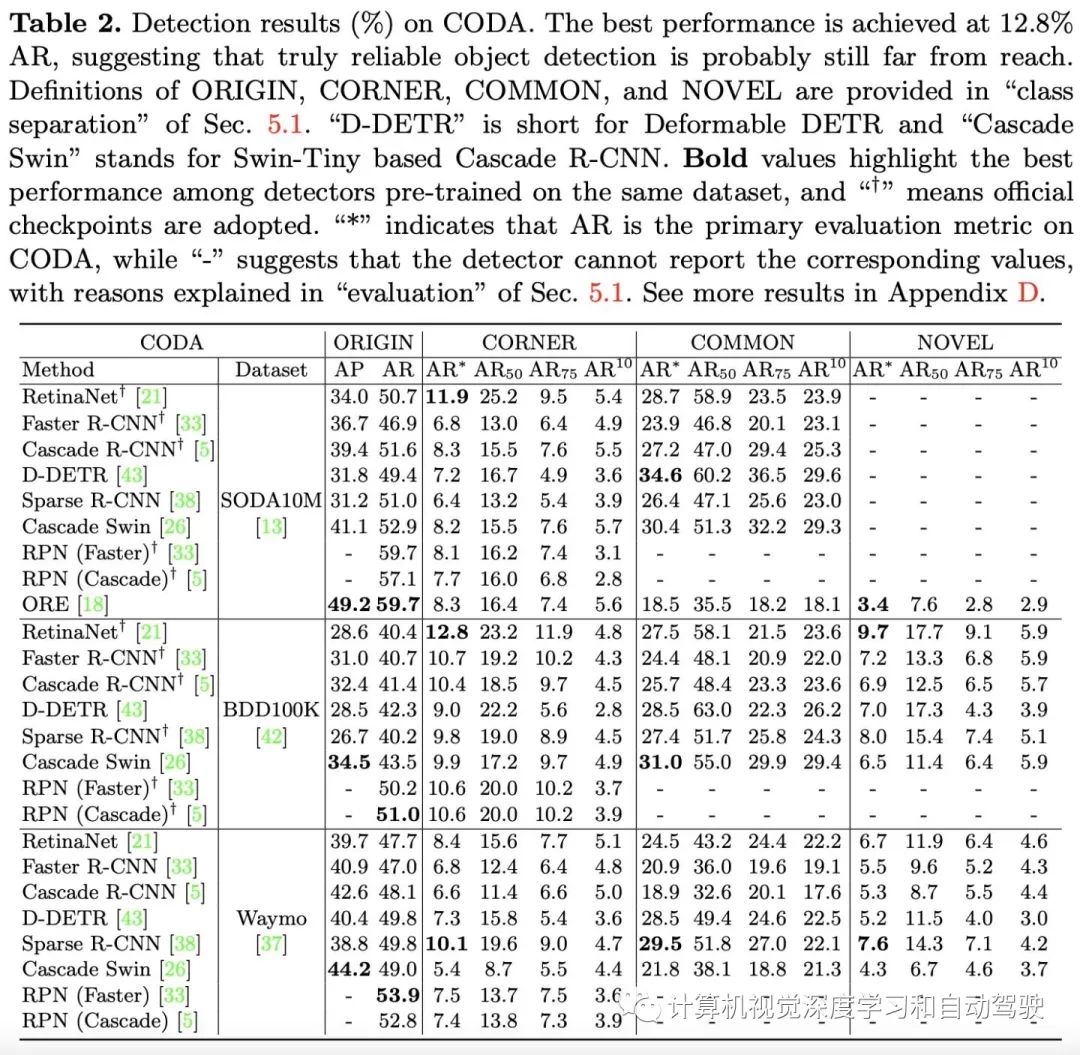
大多数现有的检测器无法检测到不常见的目标和极端情况(例如,狗过马路),在某些情况下可能导致严重事故,使得可靠自动驾驶的实际应用时间表变得不确定。阻碍开发真正可靠的自动驾驶系统的一个主要原因是缺乏公共数据集来评估极端情况下目标检测器的性能。因此这里引入了一个CODA的挑战性数据集,该数据集揭示了基于视觉检测器的关键问题。该数据集由 1500 个精心挑选的真实世界驾驶场景组成,每个场景包含四个目标级的极端案例(平均),跨越 30 多个目标类别。在大规模自动驾驶数据集上训练的标准目标寄存器在CODA的mAR表现显着下降到不超过12.8%。
此外,采用最先进的开放世界目标检测器进行实验,发现无法可靠地识别CODA中的新目标,这表明用于自动驾驶的强大感知系统可能还遥不可及。CODA数据集期望能促进对真实世界自动驾驶可靠检测的进一步研究。
数据集网址:https://coda-dataset.github.io
如图是CODA和其他公开数据集的检测结果比较:
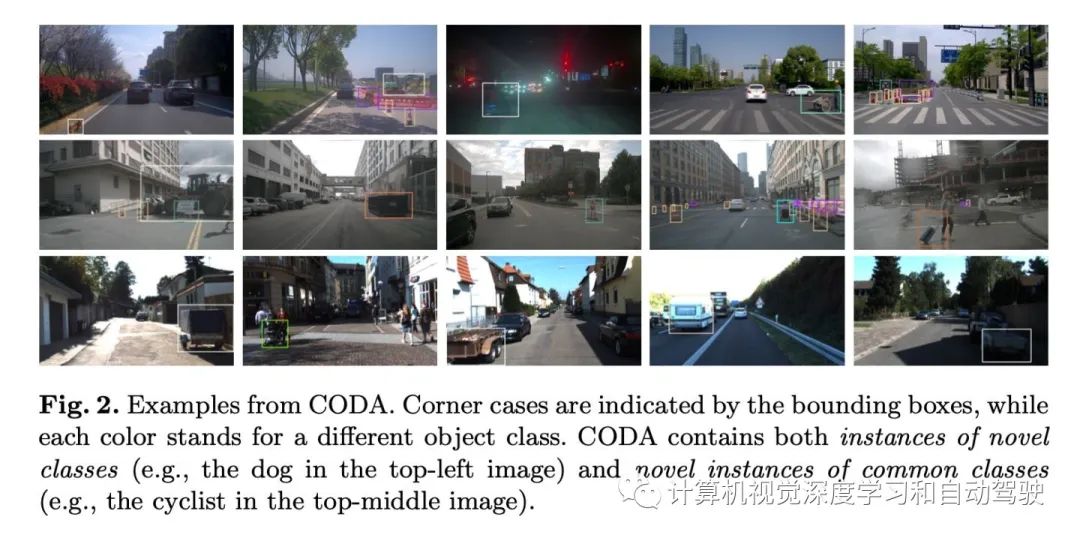
该图是CODA的一些例子:
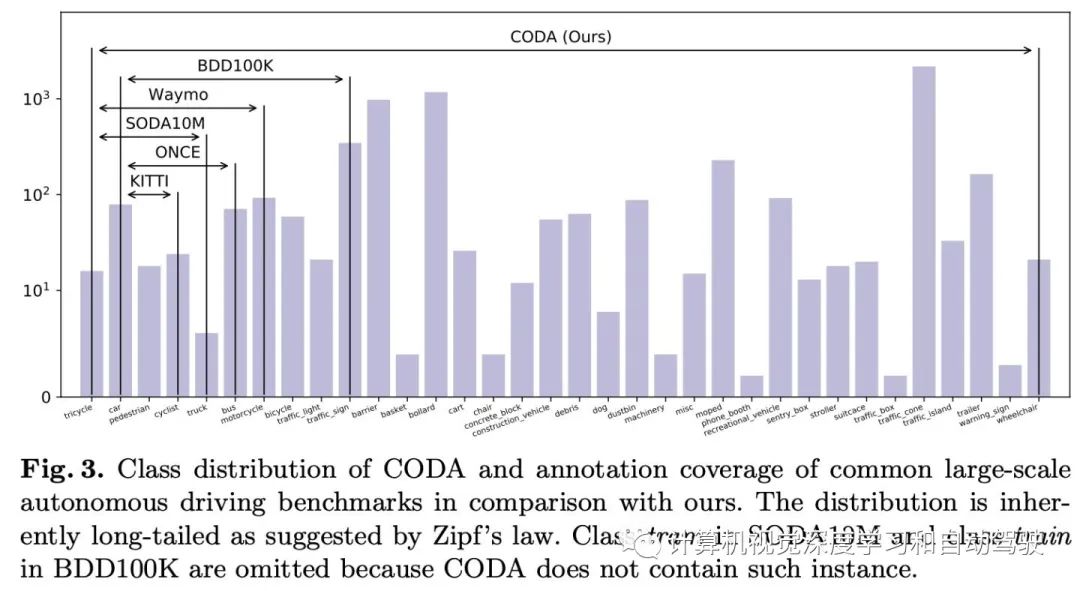
CODA中场景是从三个大型自动驾驶数据集中精心挑选的:KITTI 、nuScenes 和ONCE,一共为CODA贡献了1500个不同的场景,每个场景至少包含一个对自动驾驶汽车或其周围生活和资产有害的目标级极端案例。极端情况通常可以分为7个超级类别:车辆,行人,骑自行车,动物,交通设施,障碍物和杂项,如图列出的是下面34个细分类别:
用于确定目标是否为极端情况的主要标准如下:
-
风险:目标阻挡或即将阻挡自动驾驶汽车的潜在路径。不在道路上的静态目标,如树木和建筑物,不被视为阻挡。
-
新颖性:该目标不属于任何通用类的通用驾驶基准,或者它是通用类的新实例。为简单起见,把SODA10M的类作为通用类。
CODA的数据集建设分两个主要阶段进行。第一阶段是自动生成提议,从初始数据中识别潜在的极端情况,然后第二阶段,手动选择和标记过程,消除提议误报,对剩余的真目标进行分类,同时调整其边框使其更精确。
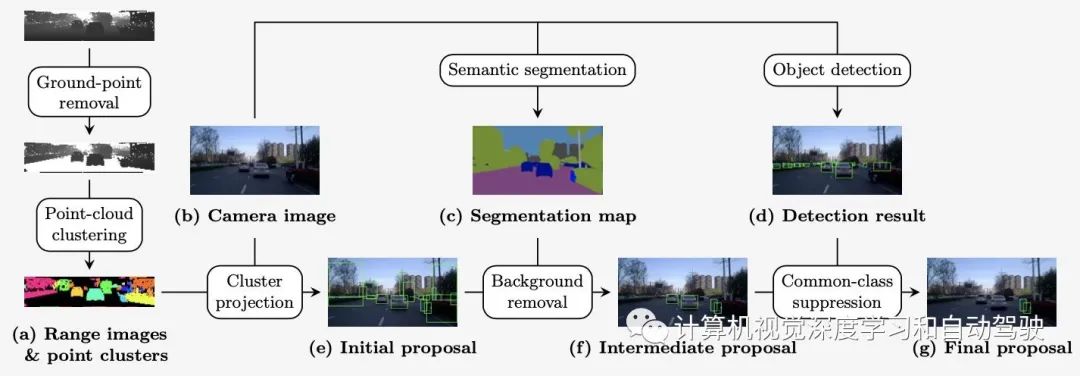
下图是用于生成极端案例提议(COPG)的流水线。流水线输入是给定场景的点云和图像。点云用于计算(a),而图像(b)用于生成(c)和(d),这有助于删除无效的提议。输出(g)是一组边框,指示图像中提议的极端情况。
下表是与其他道路异常数据集的比较。与CODA相比,其他数据集要么是合成的,要么是小规模的。BDD-Anomaly (v1) 是现实世界中最大的一个道路异常集,尽管它在实例数量上与 CODA 相当,但只包含两个目标类。

下表是CODA上的检测结果:
下图是COPG的提议和标注例子:

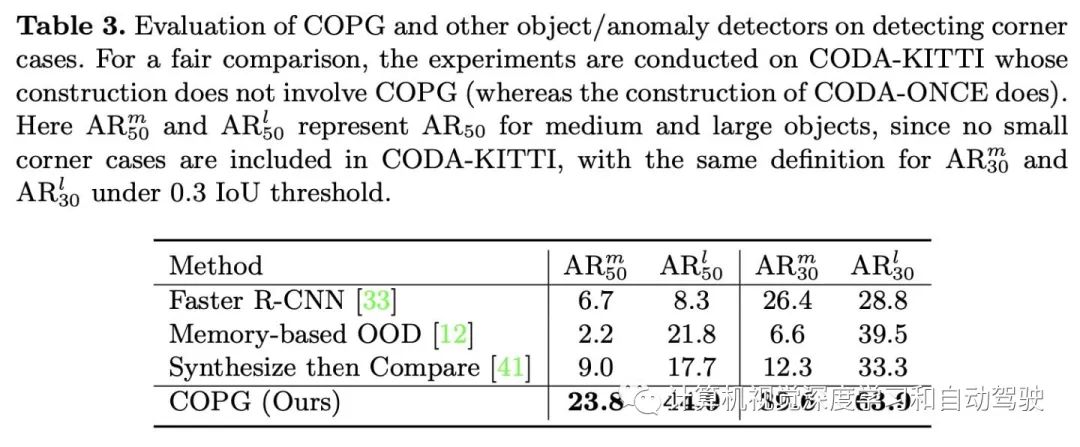
下表是COPG和其他非正常/目标检测器的评估:
- 下一篇:谈谈动力电池热管理设计
- 上一篇:重磅!《微型电动汽车专项评价规程》正式发布



编辑推荐




最新资讯
-
推荐性国家标准《乘/商用车电子机械制动卡
2025-04-30 11:13
-
载荷分解
2025-04-30 10:46
-
布雷博在上海开设亚洲首个灵感实验室
2025-04-30 10:25
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
