




 广告
广告





















































改善行人与自动驾驶汽车交互的体验:外部人机界面的人体工程学比较

原文:《Improvingthe experience in the pedestrian’s interaction with an autonomousvehicle: An ergonomic comparison of external HMI》
作者:NatachaM´etayer,St´ephanieCoeugnet
编译:赵晨尧 郭雨欣
指导:林燕丹
近年来,关于自动驾驶汽车的研究越来越多。许多研究表明,自动驾驶汽车外部人机通信接口(eHMI)的重要性,可以向其他道路使用者表明其意图。通过实验设计,将3个eHMI与3个道路基础设施进行比较,观察行人过马路行为,收集行人对不同车辆类型的感受。我们的研究结果表明,行人信息系统对行人过马路的决定有一定的影响,证实了建立行人信息系统的重要性。配备eHMI的车辆比未配备eHMI的车辆的行人在自动驾驶车辆前面过马路的比例更显著。在10%的情况下,行人使用规避策略,而不是从没有eHMI的车辆前面过马路。这种行为在没有受保护的基础设施时更常见。最后,参与者偏好的主观数据为进一步的研究和eHMI的最终实施提供了一些有前途的想法。
01、介绍
几年来,通过引入越来越先进的功能(如ADAS:高级驾驶辅助系统),汽车驾驶已经变成了一项更加自动化的活动。在某些情况下,驾驶员可以将车辆的纵向和横向控制委托给系统,但仍需负责监督(SAE自动化级别2,2016)。更高的自动化水平正在开发中,研究的重点是驾驶员作为驾驶员和汽车的监督者。然而,即使关于行人和自动驾驶汽车之间互动的研究正在出现,许多问题仍未得到解决,特别是自动驾驶汽车与其他道路使用者之间的沟通。
02外部人机交互窗口(eHMI)
为了弥补与驾驶员沟通的不足,可以采用多种形式的外部人机界面(eHMI)与其他道路使用者进行沟通。这种eHMI将通过人机界面通信取代最初的人-人交流,该eHMI的目标是向周围的交通参与者发送信息。目前对电子信息管理的研究使用了不同的通信设备(如显示器、投影、矩阵LED、文字、图片等)。事实上,这种交互目前并没有实际应用,如果不考虑其他参数(例如其他车辆),就会造成危险的情况。换句话说,车辆指示前面的行人可以过马路,因为它目前正在停车,环境中的其他车辆不一定会停车。因此,这类信息可能导致对情况的错误解释。
03基础设施
人行横道作为典型的交通基础设施之一,其会增加行人过马路的医院。Clamann等人观察到,56%的行人在没有人行横道的情况下先过马路。此外,他们发现,当有人行横道时,28%的人等待车辆完全静止后再过马路。Jayaraman等人在虚拟现实中测试了自动驾驶汽车的驾驶风格(例如,快速、中等或缓慢)以及是否存在人行横道。他们观察到,人行横道的存在增加了人们对自动驾驶汽车的信任。
04行人对eHMI和基础设施偏好实验
之前的研究已经证明了eHMIs和道路基础设施在行人与自动驾驶汽车互动过程中的重要性,一些研究已经显示了使用虚拟环境来测试行为和用户体验的效率。我们选择了3D虚拟实验环境,以提供结合两个评估池的可能性:预期行为评估和用户体验评估。本研究旨在为未来在虚拟环境下自动驾驶汽车上实施eHMI提供实证数据。设计结果将不是本文的目标,它更有利于对行为和用户体验的评估。
1、被试
样本49人,年龄20~ 60岁(平均41.02,SD= 12.3),其中女性25人。所有参与者的视力都正常或矫正过。
2、实验环境
这个虚拟环境是用3DUnity (Unity Technologies, UnitedStates)开发的。它显示在屏幕上(尺寸:60.8*34.6厘米),参与者在这个环境中用操纵杆移动。他们的移动速度是每秒3米(大约是参与者平均实际速度的两倍)。这个恒定的速度对所有参与者和测试条件是相同的,以抵消个体之间的影响,并允许我们控制车辆与行人之间的差距。当行人到达目标交叉口前的触发区时(图1),左侧街道的车辆启动并以30km/h的速度行驶。当检测到参与者到达环境中预先设定的位置(即,所有参与者都相同)时,车辆立即停止,并在行人过马路时重新启动。
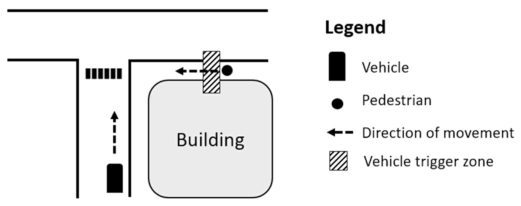
图1车辆触发示意图

图2虚拟城市环境示例图
图3展示了带有两个配置示例的虚拟环境的示意图。在这个图中,环境结构(例如建筑位置,路口)是一样的,但是基础设施的类型或车辆的类型是平衡过的。例如,在1号楼与2号楼之间的交叉路口,在配置(a)中,有一辆常规车辆,没有行人过路。而配置(b)在同一交叉口,存在一辆没有eHMI的自动驾驶车辆和一个人行横道。这些配置更改使得一个参与者与另一个参与者相比没有看到相同的配置顺序。由于有3个基础设施和5辆车,每个参与者面临15种配置。
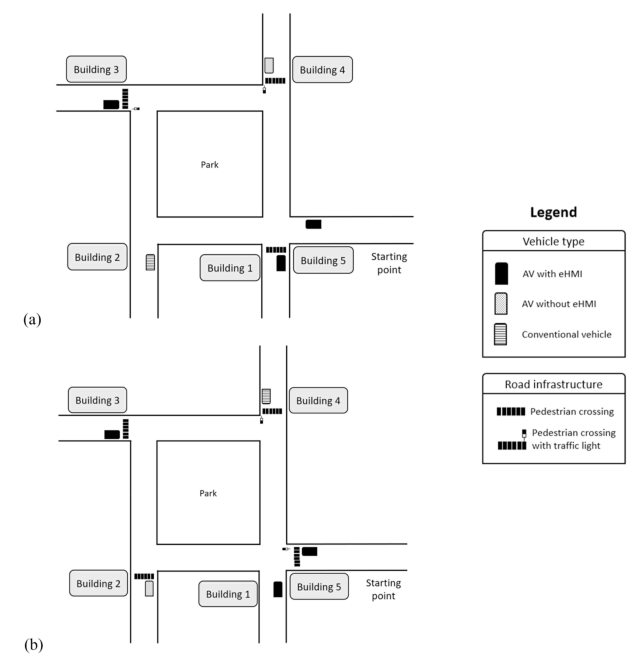
图3虚拟环境的示意图,包含两个配置示例
3、交通工具
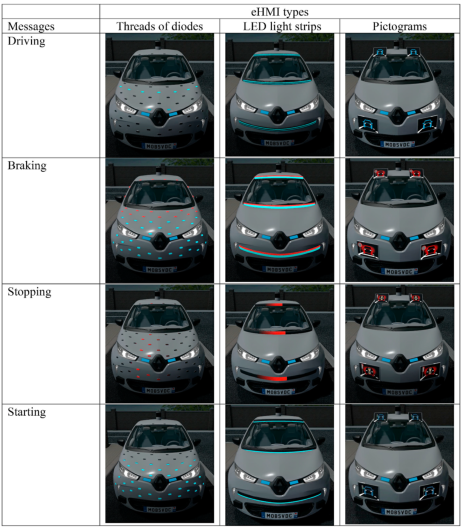
在自动驾驶汽车上使用eHMI测试了三种系统:i)二极管线程,ii)LED灯条和iii)象形图。二极管螺纹对应的几个二极管定位在车辆的前面,从开始的屋顶到保险杠。LED灯条由三个LED波段组成,分别位于挡风玻璃上方、挡风玻璃下方和保险杠上方。象形图系统由4个显示象形图的屏幕组成,分别位于车辆前部的四个角落,一个位于右上,一个位于左上,一个位于右下,一个位于左下(见表1)。
表1这4种信息和3类eHMI
4、调查表与问卷
本实验采用的调查表与问卷如下:过马路评估问卷、接受范围问卷、系统偏好问卷、真实度量表。
5、实验过程
受试者被安置在椅子上,面对屏幕(距离屏幕160厘米)。首先,参与者被邀请进入虚拟环境,以更加熟悉操纵杆的使用。当参与者对虚拟环境的置换感到舒适时,置换的熟悉阶段结束。然后,指示被分发给参与者。任务包括确保夜间城市建筑的安全。参与者被告知有几种类型的车辆可以运行,即有驾驶员的常规车辆、没有通信系统的自动车辆和有通信系统的自动车辆。在每个测试阶段,参与者在一辆常规车辆、一辆没有eHMI的自动驾驶汽车和三辆带有eHMI的自动驾驶汽车前面穿过街道。他们还面临着三种基础设施类型(见图4)。
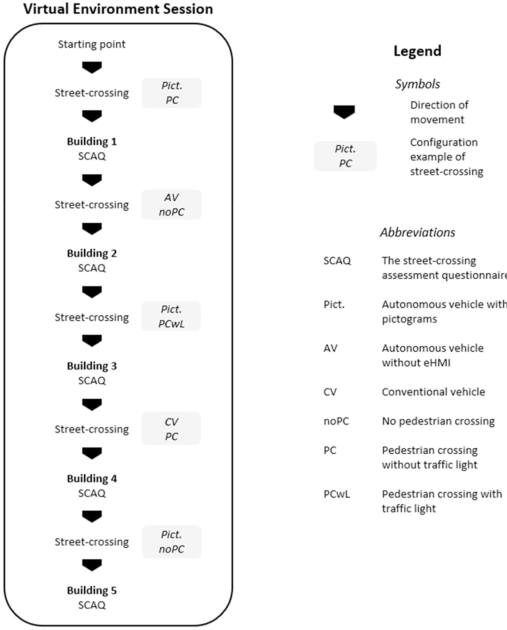
图4虚拟环境-eHMI系统的一个示例
05实验结果
1、沉浸度
在场问卷决定了参与者的沉浸程度。参与者评估他们在虚拟环境中的整体沉浸度为76%。
2、行为
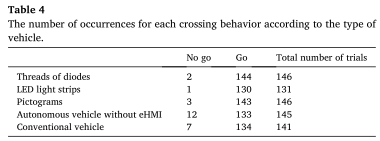
表2列出了根据遇到的车辆类型,每种行为的“去/不去”行为的出现次数。不同类型车辆之间的交叉行为存在显著差异(χ2(4,N = 709) = 16.338, p =.003)。在没有eHMI的车辆与有eHMI的车辆之间进行比较时,这种差异仍然存在(χ2(1,N = 709) = 13.694, p <.001)。当参与者遇到一辆没有eHMI的车辆时,他们比遇到一辆有eHMI的车辆更频繁地从车辆后面经过。
表2根据车辆类型,每一次交叉行为发生的次数
3、三类eHMI的评估
接受量表对eHMI进行了评估。在多元重复测量检验中,一般线性模型检验不考虑方差-协方差矩阵的球形性,因此我们依靠Greenhouse-Geisser校正进行分析。分析未能突出三种eHMIs之间在效用分量表(F(1.702)= 1.155, p = .314)或满意度分量表(F(1.586)= 1.662, p =.201)方面的差异。尽管如此,参与者在两个子量表中对eHMI的评价是积极的(见表3)。另一个分析包括显示eHMI是否允许更好地理解车辆行为(即,理解车辆已停止;94.35%正确理解)比车辆没有配备eHMI时(80.72%正确理解)高。统计分析表明,有eHMI时比没有eHMI时更容易理解车辆行为(χ2(1,N = 647) = 28.989, p < .001)。
表3三种eHMI的接受量表的两个分量表的平均分数(和标准偏差)

4、参与者的eHMI偏好
测试结束后,参与者根据自己的偏好对三个eHMI进行排序(见图5)。分析显示各eHMI之间存在差异(χ2(2,N = 49) = 16.449, p <.001)。与其他两个ehmi相比,二极管的线程较少被选为第一。参与者主要喜欢LED灯条和象形图。对于第二种选择,各eHMI之间出现显著差异(χ2(2,N = 49) = 6.898, p =.032),其中象形图的排名低于其他两个eHMI。各eHMI间第三位的差异无统计学意义(χ2(2,N = 49) = 5.429, p = .066)。

图5eHMI根据参与者的偏好(出现次数)对结果进行排序
06结论
总之,新的挑战是通过面对不同的环境和其他弱势用户(如骑自行车或踏板车)来巩固这些结果。与此同时,我们对行人的研究结果显示了对eHMI的真实需求,特别是在不明确的情况下(即没有人行横道),这与积极用户的信任体验紧密相关,我们的结论可能有助于标准化和监管团体的考虑,因为它强调了即单靠eHMI不足以考虑行人和自动驾驶汽车之间的互动。为了设计出最安全、最可接受的交互条件,必须考虑到所有系统:车辆的行为,行人的期望和需求,专家的分析(例如,ISOTR23049标准建议反对可能涉及危险行为的沟通指导),以及监管约束(例如,车辆的颜色和位置)。
文章来源:
NMétayer, Coeugnet S. Improving the experience in the pedestrian'sinteraction with an autonomous vehicle: An ergonomic comparison ofexternal HMI[J]. Applied Ergonomics, 2021, 96(4):103478.



编辑推荐




最新资讯
-
全国汽车标准化技术委员会汽车节能分技术委
2025-04-18 17:34
-
我国联合牵头由DC/DC变换器供电的低压电气
2025-04-18 17:33
-
中国汽研牵头的首个ITU-T国际标准正式立项
2025-04-18 17:32
-
为什么要进行汽车以太网接收测试?汽车以太
2025-04-18 17:26
-
产品手册下载 | NI 全新USB数据采集-NI mio
2025-04-18 16:39
