




 广告
广告





















































LDV系统应用分享:多相流测量

激光多普勒(LDV)的速度测量步骤通常包括两部分,首先是在流场中散播示踪粒子,然后是测量示踪粒子的速度,这里的前提是假设示踪粒子会真实地跟踪流体运动。
然而,在某些情况下,流体的运动通过示踪粒子代征,但我们也想知道流体中其他物体或颗粒的速度。接下来的挑战是如何区分多普勒信号的来源:它是来自示踪粒子还是流动中的其他物体?在过去,各种各样的技术已经尝试去做这种区分,如荧光标记、测量光电倍增管电流以及速度binning功能。所有这些方法都存在各种各样的缺点,而且不可靠。荧光标记会产生低信噪比的弱信号,光电倍增管电流测量是不确定的,因为一个小的缓慢移动的示踪粒子在流动中会有类似于大的高速移动物体的电流,速度binning也是不确定的,因为一些示踪粒子具有低速或负的速度时,将无法区分流动中的物体。
强度测量和标记显然是最好的替代方案,因为无论速度如何,示踪粒子的散射强度总是比流体中其他较大的物体低。此外,也不需要使用昂贵的荧光粒子或其他特殊颗粒。
二维LDV系统被用来进行一系列多相流测量,实验装置是在含一个砂床的水槽中,示踪粒子是10μm玻璃球。
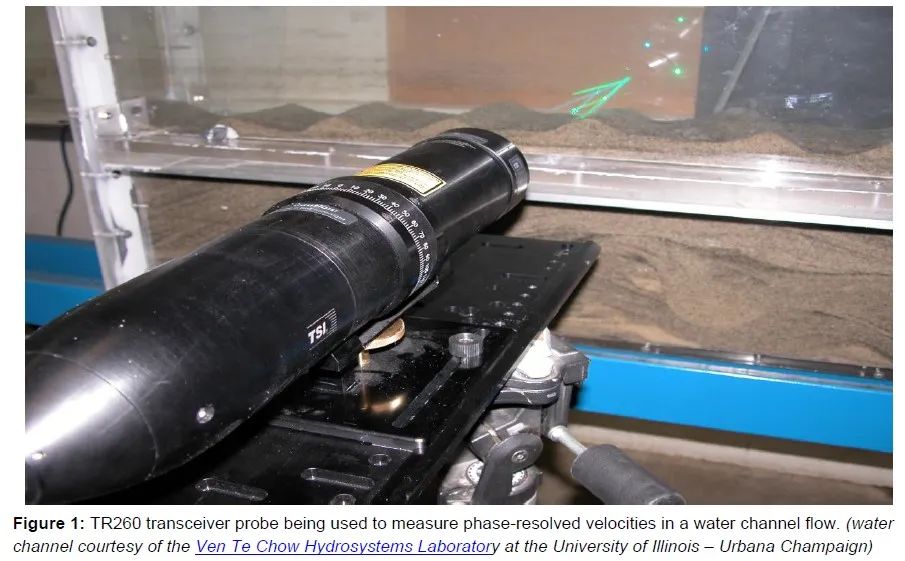
LDV系统由LA6000-5W型氩离子激光器、FBL-2光纤分光器和TR260收发探头组成。通过收发探头采集散射光信号,发送到PDM1000-2光电转换器,使用带有FLOWSIZER软件的FSA 3500-2信号处理器进行采集和数据分析。探头设置在水槽外,垂直调节,允许在沙床以上的不同高度测量,如图1所示。
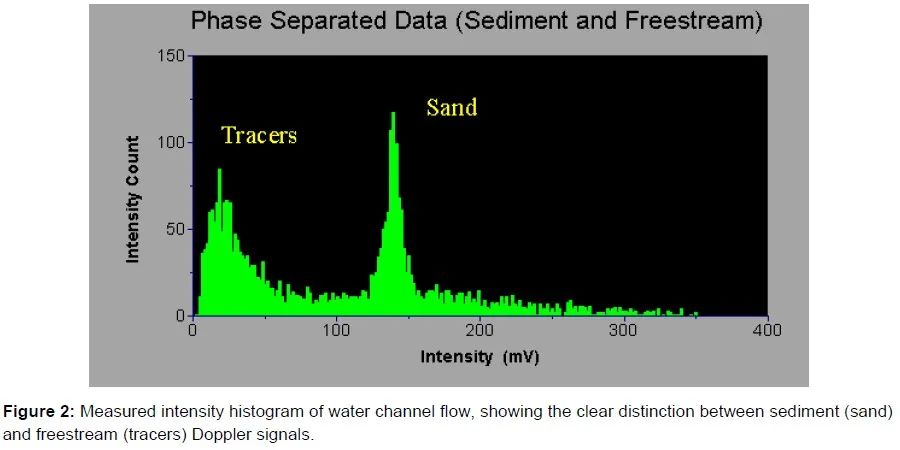
图2显示了一个以含沙颗粒为泥沙相的水流的散射光强度直方图。每个多普勒脉冲都由FSA信号处理器进行分析,并标记其强度(或振幅),然后可以应用Subrange来分离不同相的数据。
在这个应用中,我们关注的是水槽流速的相位分离测量,TSI的专利强度标记功能提供了一个鲁棒的参数来分析这两个不同相的流动。








最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
