




 广告
广告





















































车辆横摆特性和侧偏特性在横向前馈控制中的应用

汽车的稳定性对于车辆的行驶安全至关重要,是一直以来的研究热点。表征车辆稳定性的两个主要状态变量是质心侧偏角和横摆角速度,其主要取决于车辆的横摆特性和侧偏特性。在公众号文章:车辆横向动力学前馈控制中的几种常用方法的前馈方法介绍中也体现了对横摆特性和侧偏特性的应用,本文对此展开了如下讨论。
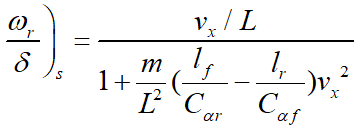
1.横摆特性汽车等速行驶时,在前轮角阶跃输入下进入的稳态响应就是等速圆周行驶,常用输出与输入的比值,如稳态的横摆角速度与前轮转角来评价稳态响应,即稳态横摆角速度增益。
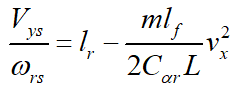
2.侧偏特性车辆稳态行驶的侧向速度可以表示成横摆角速度与纵向车速的函数。
3.前馈控制中横摆特性与侧偏特性的应用基于二自由度模型的前馈控制,利用了车辆的稳态横摆特性
联立汽车运动二自由度方程得到车辆前馈转角为
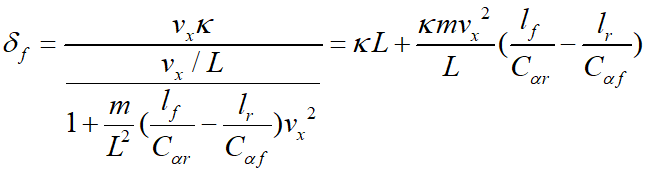
可以看到基于二自由度模型的前馈控制正是利用了车辆的横摆特性。在基于拉氏变换的前馈控制中,当稳态位置误差为0时,可以得到车辆前馈转角为

根据

将上式进行变换得到
根据上式形式可以得到
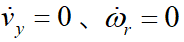
基于拉氏变换的前馈控制由车辆二自由度模型中的横摆特性和侧偏特性决定,当

时,此时车辆横向速度为0,质心侧偏角为0,车辆不发生侧偏

,基于拉氏变换前馈仅由横摆特性决定。针对车辆侧偏特性我们进一步探讨,质心侧偏角为0的情况,当
时,即

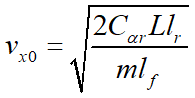
求解得到临界车速为
4. 仿真与验证
在Simulink中搭建二自由度模型具体参数如下表所示:
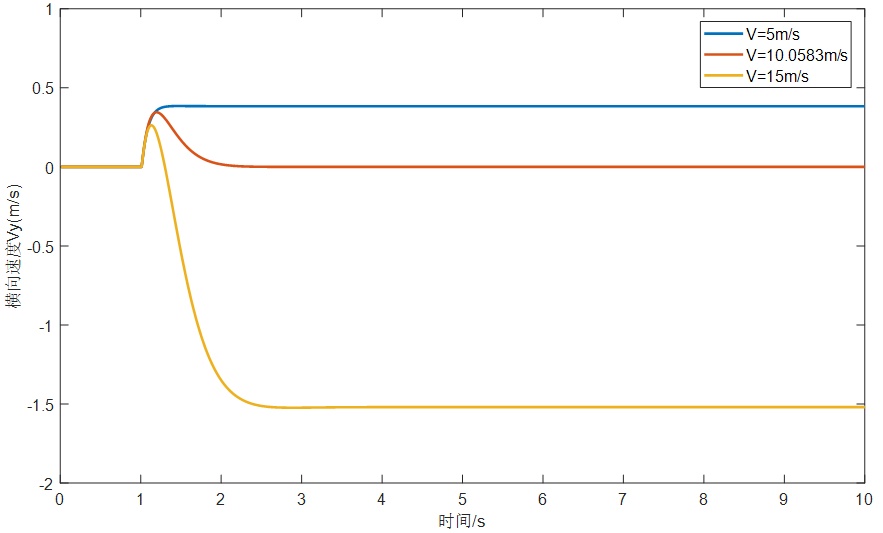
表1 汽车二自由度模型参数表参数符号参数值汽车质量m1820kg质心到前/后轴的距离a/b1.17/1.77m转动惯量Iz3746kg·m²前后轮的侧偏刚度Cf/Cr52151/41400N/rad根据以上参数求解得到的车辆横向速度为0时的临界车速约为10.0583m/s,为了验证所求解的准确性,本文对不同车速下二自由度模型对前轮角阶跃输入的响应进行仿真,结果如图1和2所示。当车速低于临界车速时,横向速度Vy与横摆角速度wr方向相同,车辆转弯时的内径差就此产生;同为正值,当车速达到临界车速时,横向速度Vy稳态响应为0;当车速高于临界车速时,横向速度Vy与横摆角速度方向相反,横向速度Vy绝对值明显增大,这也说明了在高速下,车辆在转弯时容易发生甩尾、侧滑现象。而在自动驾驶漂移或其他紧急转向场景中,可以充分利用该特性进行极限转弯,如图3所示,此时的车轮方向或车头朝向与真实的行驶轨迹方向相差较大,即存在较大的侧偏角,这就是主动利用车辆侧偏的典型案例。
图1 不同车速下二自由度模型横向速度对前轮5°角阶跃输入的响应
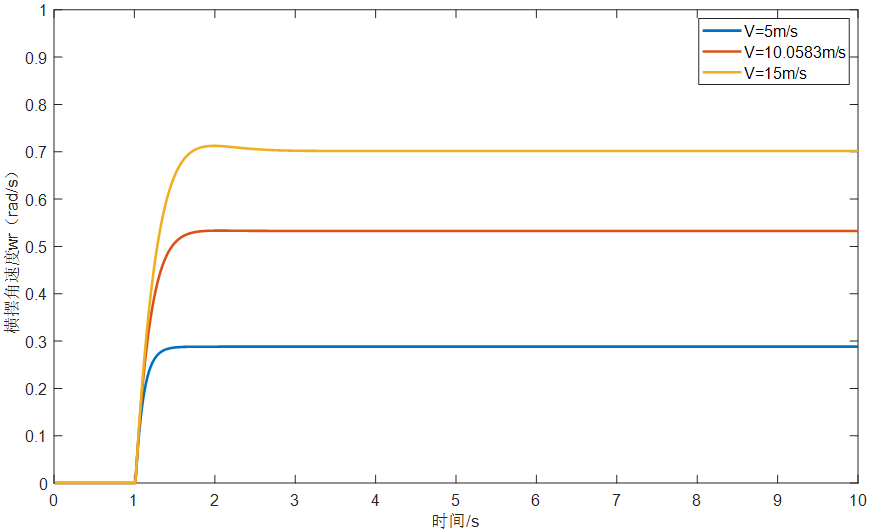
图2 不同车速下二自由度模型横摆角速度对前轮5°角阶跃输入的响应

图3 斯坦福自动驾驶漂移的主动侧偏控制
- 下一篇:一文读懂车辆变道预警系统
- 上一篇:某混合动力汽车动力总成噪声的试验评价





最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
