




 广告
广告





















































行为预测技术——自动驾驶破局关键

自动驾驶领域已持续火热了多年,而截止目前,自动驾驶在真实复杂场景下的大规模部署却一再延后。其中一个很重要的原因是,对于动态和强交互性场景下的行为和轨迹预测问题(behavior prediction)始终没有得出很好的解决方案。由于缺乏对其他道路参与者的行为理解与预测,自动驾驶车辆便无法进行安全高效的决策、规划以及控制。
在自动驾驶领域,很早就有业内人士指出:行为预测是自动驾驶最具挑战性的问题之一,比如曾经领导Google无人车项目多年的Chris Urmson,曾在演讲中提到:Google无人车项目的最大障碍就在于怎样理解并预测周围道路参与者的未来行为。
什么是自动驾驶中的行为预测问题?
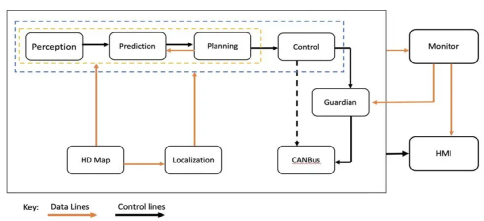
让我们从自动驾驶汽车的工作原理开始。我们知道,目前自动驾驶的整体架构如下图所示,预测处于的位置在感知与规划之间,它拿到上游感知识别到的障碍物信息,并对这些障碍物在未来时间内的行为及轨迹做出一系列的预测,再将预测的轨迹给到规划模块,从而帮助规划模块能够生成更加合理、安全、舒适的轨迹。
自动驾驶汽车需要能够对未来做出预测 —— 这是司机们一直在潜意识里做的事情。设想一辆自动驾驶汽车试图左转,而另一辆车正从相反的方向驶来。为了使自动驾驶汽车安全地执行这一操作,它需要确定另一辆车是右转还是继续直行并干扰左转,这正是运动预测的意义所在。而自动驾驶驾驶中的预测模块,便是模仿司机在道路上针对不同障碍物的预测判断,而不同的驾驶员针对相同的障碍物,他们的判断是不一样的,往往一个老司机比一个新手司机所多出来的知识经验就体现在这方面,而这也恰恰决定了一个自动驾驶系统的智能性及安全性,是他是否能达到类人驾驶的一个重要标志。
行为预测到底重要在哪?
我们知道,评判一个司机是否是经验老到的老司机,最重要的一点就是他对未知情况的预见性,如果能预测出一些危险的场景并能提前做出判断,那便能使得驾驶更加得安全舒适,而自动驾驶中的行为预测技术在这里便是充当这一功能。可以说没有行为预测,自动驾驶也许能解决大部分的简单场景,但是要真正实现L5级别的自动驾驶,行为预测是其中的关键技术,也是决定各家厂商最后成败的关键一环。
自动驾驶公司 Pronto CEO Anthony Levandowski 讲述了自己的看法:他认为自动驾驶原型车在「预测」能力上的短板是阻碍其奔向 Level 4/5 的绊脚石。在 Medium 上发布的一篇博文中,Levandowski 写道:「现在没人能实现 Level 4/5 是因为如今的软件还不太行,它无法预测未来。在这方面,软件跟人类直觉差远了,而行为预测又恰恰是道路安全最重要的因素。」

目前市场上的自动驾驶系统中,预测环可能是每个业界玩家都深感头疼,却又不得不解决的一个难题。在一次商业采访中,Levandowski 又重申了预测重要性这一观点:
「如果你想分析测试车每次『脱离』背后的故事,找到真正的原因,最终结果都是软件故障。即使是较为成熟的公司也难以避免,因为在复杂环境下,车辆很容易出现误解或沟通问题。眼下我们的问题不是能否找到更好的传感器,而是如何解决预测这个大问题。」由此可见预测的重要性在所有自动驾驶公司中都已经得到极大的重视,并且也提上了日程。
行为预测的现有解决方案
根据行为预测问题的定义,业界将自动驾驶轨迹预测的方法分为3类。
1.Physics-based motion models 物理模型
2.Maneuver-based motion models 意图模型
3.Interaction-aware motion models 交互模型
物理模型即利用汽车运动学模型及动力学模型,把汽车当做一个刚体,根据刚体运动预测汽车的轨迹。缺点是对时间的定性约束,车辆非常多的情况,不能应用到其它拓扑结构的道路。
意图模型将车的轨迹可以分为一系列的簇,每一簇对应一个典型的运动模式。缺点是对时间的定性约束,车辆非常多的情况,不能应用到其它拓扑结构的道路。
交互模型比物理模型预测的时间更久,比基于意图的预测更加稳定,但同时计算多个汽车之间的关系计算量比较大,非常耗时。
行为预测的未来挑战
作为自动驾驶的重要细分方向之一,“自动驾驶中的行为预测问题“吸引了大量研究人员的关注与努力。近年来,伴随着深度学习在自动驾驶领域的应用不断加深,行为预测的精度更是得到了大幅度的提升。然而,现实世界中的驾驶场景极其地复杂多样,不同的驾驶场景(高速,交叉路口,环岛等),无论是道路结构,还是驾驶模式都存在不小的差异。
从驾驶场景来看,当前的行为预测方法通过训练后可以在训练集所包含的场景上表现良好,但是一旦遇到一个全新的或者稍有差异的场景,模型的预测性能往往会崩溃或大幅下降。通过上述行为预测方法训练出的模型,由于迁移性(transferability)和泛化能力(generalizability)的缺失,会极大地限制自动驾驶进行大规模部署。倘若需要针对每一个驾驶场景专门训练一个模型,可想而知开发成本会多么高昂。

除此以外,对真实驾驶环境中复杂多样的驾驶行为实现高效精准预测,也是一项不小的挑战。驾驶行为因人而异(heterogeneous) ,不同的驾驶员展现出的驾驶行为存在着较大差异,不同的驾驶员也有着不同的驾驶风格,有粗鲁莽撞的驾驶员,也有谨慎礼貌的驾驶员。
而目前的大部分预测方法,通过训练后仅仅能够预测出平均意义上的驾驶行为,却无法捕捉到驾驶员的个体差异。智能体对个体行为差异理解的缺失,将会始终制约行为预测的精度,因而自动驾驶行为的安全性也将难以得到保障。
在不久的将来,预测将会成为自动驾驶落地的关键技术之一,而预测算法的强大与否,也将直接决定了现在所有自动驾驶玩家的上限,以及用户在体验各家产品对于乘坐安全性及舒适性的高要求。
参考资料:
[1]知乎OpenDILa:
https://zhuanlan.zhihu.com/p/513363447?utm_source=wechat_session&utm_medium=social&utm_oi=963565229426352128&utm_campaign=shareopn



编辑推荐




最新资讯
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
-
天检新能力VOL.95 | 乘员晕车仿生测试能力
2025-04-25 10:14
