




 广告
广告





















































毫米波雷达的测速原理

1 单目标的测速原理
一、傅里叶变换:
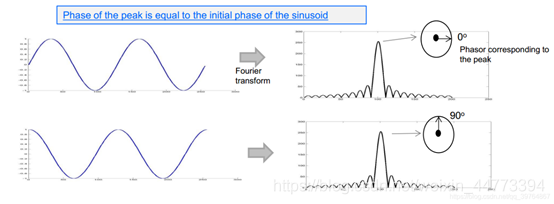
FFT变换将时域信号转换为频域;
时域中的正弦波在频域中产生一个峰值。通常,频域中的信号为复数(即每个值都是具有振幅和相位的相量)。
具有相同频率、不同初始相位的正弦信号经过FFT变换,在相同横坐标位置处(频率相等)产生峰值,但峰值信号的相位不同,峰值的相位等于正弦波的初始相位。
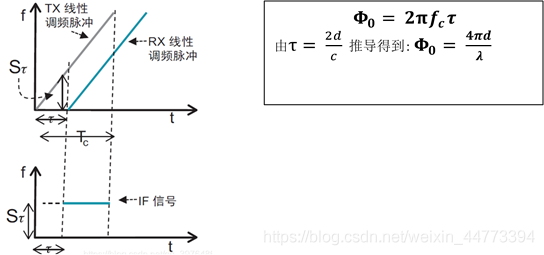
二、中频信号:
中频信号IF的初始相位Φ0是IF信号起点对应的时间点的TX信号与RX信号的相位差:
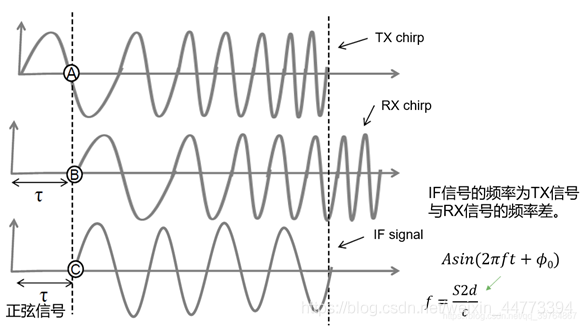
因此,对于与雷达位置为d的物体,IF信号将是一个正弦波,
Asin(2πf_0 t + ϕ_0)
其中 f_0= S*2d/c
Φ_0= 4πd/λ
当物体静止时,发射信号与接收信号的频率差和相位差如下图:
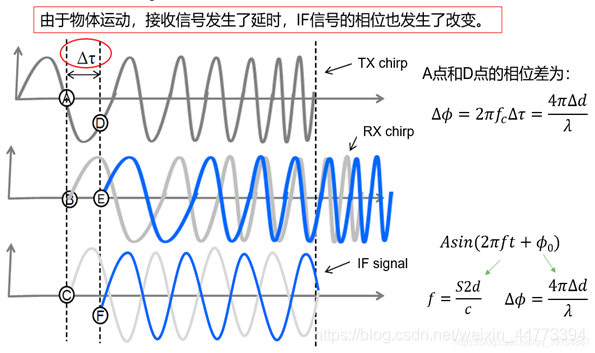
当物体运动时,发射信号不变,接受信号发生Δτ的延时,相位的变化如下图:
当物体运动时,发射信号不变,接受信号发生Δτ的延时,相位的变化如下图:
三、速度估算原理:
FMCW雷达发射间隔为 Tc的两个Chirp,每个反射的Chirp脉冲通过Range-FFT进行处理。对应于每个Chirp的Range-FFT,将在同一位置出现不同相位的峰值。该相位差与物体移动的位移有关。
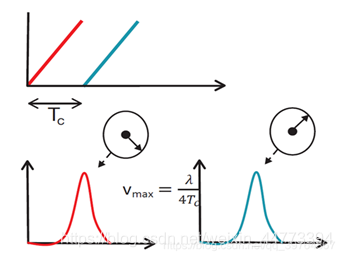
由于 Δϕ=4πΔd/λ 其中Δd=v*T_c 推导可得 v=λ*Δϕ/(4π*T_c )
2 多目标的测速
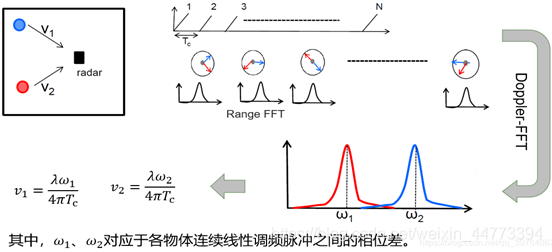
如果速度不同的多个移动物体在测量时与雷达的距离相同,则双线性调频脉冲速度测量方法将不起作用,由于物体与雷达的距离相同,因而生成的IF信号频率将相同,经过距离FFT会产生单个峰值,该峰值表示距离相同物体的合并信号。为测量速度,必须发射两个以上的Chirp信号。
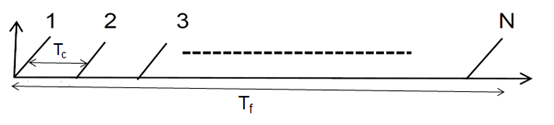
对同一距离处多个物体的速度估算,需要发射一组N个等间隔的线性调频脉冲,称为“帧”。对于等距不同速的两个物体,在同一帧内,通过Range FFT 后在峰值处提取各相位,并做Doppler FFT,会产生两个具有不同的峰值,其对应的横坐标为各物体的相位差。同距不同速的两个物体的速度分别为v1、v2,如下图:
3 速度分辨率
根据离散傅里叶变换理论,两个离散频率 ω1和 ω2仅当Δω> 2π/N 才能进行分辨 。
公式推导如下:
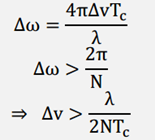
因此,速度分辨率取决于帧的时间,即:
v_res=λ/(2T_f )
4 雷达的最大测速
由于速度测量基于相位差,因而会存在速度模糊性,仅当 Δϕ < π时具有非模糊性。
由速度计算公式 v=λ*Δϕ/(4π*T_c ) 可推导出最大速度:
v_max=λ/(4T_c )
- 下一篇:一种整车域控制器片内及片外时间同步方法
- 上一篇:ADAS软件测试的代码生成器



编辑推荐




最新资讯
-
奇石乐推出用于DAQ数据采集系统的KiStudio
2025-04-28 17:51
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
