




 广告
广告





















































带硬件辅助存储的自动驾驶路径规划加速方法

arXiv上2022年5月5日上传的论文“Accelerating Path Planning for Autonomous Driving with Hardware-assisted Memorization“,作者来自Cornell大学。
动态障碍物的自动驾驶路径规划是一个挑战,因为需要在满足实时约束的同时执行更高维搜索(包括时间)。作者提出了一种算法-硬件协同优化方法,加速基于高维搜索空间的路径规划。
首先,将节点和障碍物映射到低维空间并存储最近的搜索结果,减少最近邻搜索和碰撞检测的时间。然后,提出一种用于高效存储的硬件扩展方法。在一个现代处理器和一个循环级(cycle- level)模拟器的实验结果表明,该算法的执行时间显著缩短。
路径规划的及时执行对车辆的安全和效率至关重要。修剪(pruning)是被用来在软件中加速的方法。针对RRT、PRM和A*等算法,人们用不同的硬件技术,包括FPGA或ASIC,还提出了特定于算法的加速器。虽然这些路径规划加速器确实解决了特定场景中的个人需求,但不是针对自动驾驶,也不考虑动态障碍。
此外,随着法规(regulation)和算法的不断发展,选择和修改加速路径规划算法的灵活性也非常重要。然而,许多现有路径规划加速器一次设计只考虑一个特定的算法,大多数超参在设计/编程时固化到加速器硬件中。虽然这些硬件化算法在发布时表现良好,并在目标场景提供良好的性能,但不够灵活,无法适应新的或修改算法。
-
动态障碍物的对付
自动驾驶车辆在2D平面执行路径规划。在不同的时间,障碍物将位于2D平面的不同位置。2D平面的动态障碍物成为一组障碍物,在三维空间的坐标可以用(x,y,t)来描述。
可以有效地将带有动态障碍物的2D规划问题视为3D规划问题。然而,时间维度不同于普通的空间维度,这需要对其进行额外约束。由于时间只沿一个方向移动,对于路径P上i<j的任意两个节点(xi,yi,ti)和(xj,yj,tj),必须保证ti<t j。在RRT选择最近邻时,将强制执行附加约束。
-
基于软件的存储RRT算法
用存储(memorization)来减少路径规划的总执行时间。在传统基于采样的规划(比如RRT)中,大部分执行时间都花在寻找最近邻(NN)以及检测会不会碰撞。为了加速这些过程,存储最近访问的节点和碰撞状态,以便跳过一些类似的查询。
如图显示了整个方法的流程:基准(蓝色箭头)规划流程和改进(橙色箭头)规划流程。
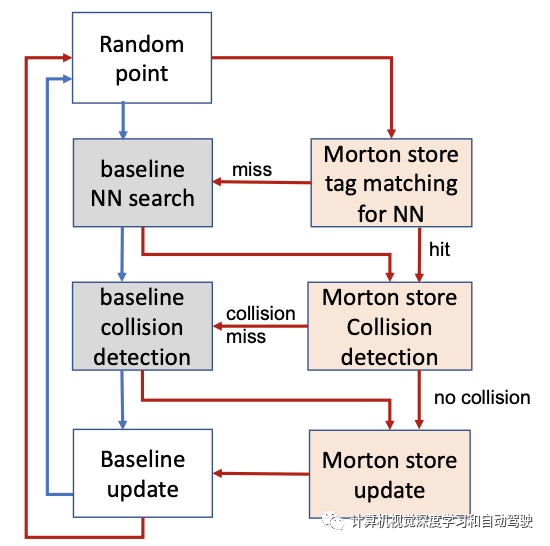
在基准RRT,所有迭代执行耗时的最近邻搜索和碰撞检测。然而用一个名为Morton store的小型数据存储器(以Morton空间归档曲线命名)记住基准最近邻搜索和碰撞检测的关键信息。对每个迭代,首先检查Morton store,以便有机会跳过耗时的基准NN搜索和碰撞检测。
规模有限的Morton store的运作如下。
先计算树节点坐标 Xn =(Xn,yn,tn)以及障碍物 Xo =(x,y,t)的Morton codes Mn 和 Mo。Morton code将点(x,y,t)从3D空间ooo投影到1D曲线,同时保持空间位置(32位整数)。Morton codes Mn 和 Mo 是64位数,用作相应节点和障碍物的标记。为调整投影粒度,屏蔽Morton codes的k个最低有效位

其RRT算法伪代码如下:
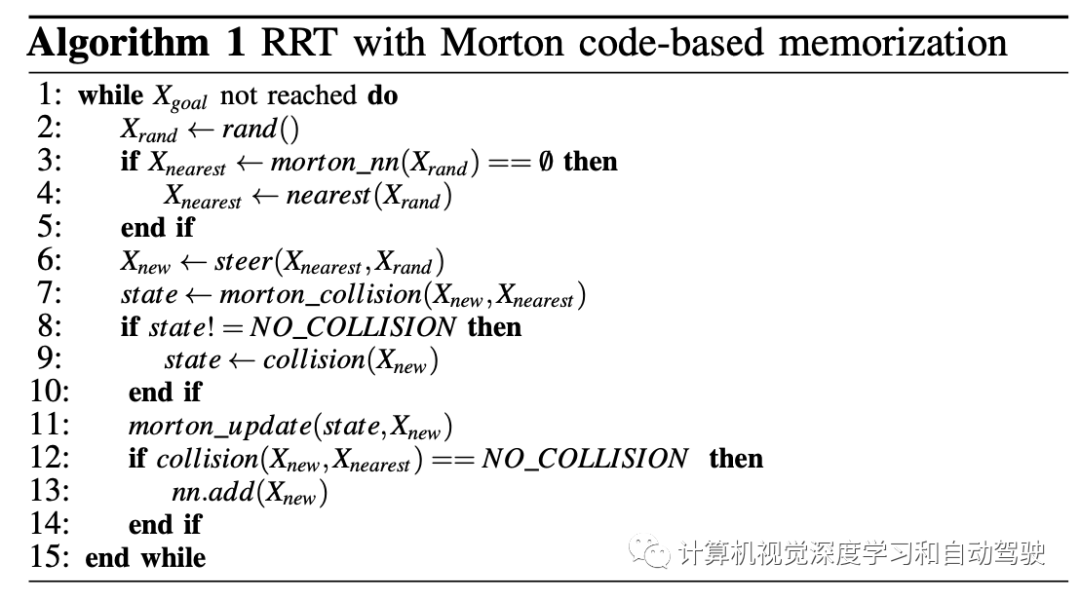
这个解决方案必须对每段(segment)路径执行精确的碰撞检测,以确保安全(无碰撞)。与使用Morton store进行精确碰撞检测节省的时间相比,该解决方案检查开销可以忽略不计。算法时间复杂度为O(N *(α * logN + β * logL)),其中N是树中的节点数,L是障碍物数,α、β是第8行和第12行的概率(0<α,β≤ 1) 。对于不用Morton store的正常RRT算法,α,β = 1。
-
硬件辅助的存储RRT算法
基于软件的Morton store算法跳过耗时的基准NN搜索和碰撞检测,显著减少执行时间,并且可以通过硬件辅助存储进一步加速。由于Morton codes的计算和匹配按顺序在软件中迭代所有Morton codes,因此可能需要多条指令。为了估计Morton store需要多少动态指令,用Valgrind来计算Morton store查找和更新的动态指令数。
如图显示了不同地图边长度、时间步长和动态障碍物数量的不同测试用例结果。
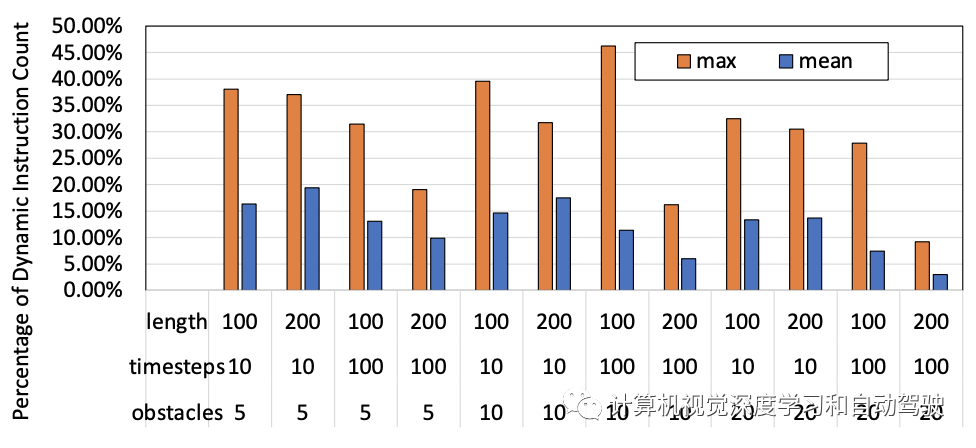
平均而言,与Morton store相关的动态指令计数占动态指令总数的20%,最坏的情况下可能占动态指令总数的45%以上。然而,通过硬件辅助存储,动态指令计数可以显著减少。可以直接在硬件使用CAM(content-addressable memory )进行Morton store查找和更新,减少动态指令计数和相应的执行时间。
基于硬件的Morton store由一个全关联的CAM实现,memoryline大小为64字节,可以维护RRT节点的8个8字节地址。由于这些节点是在堆栈上分配的,因此设置中MSB始终为0,并且地址的最高有效8位指示是否存在碰撞。
如图显示在CAM中实现硬件Morton store的示例。
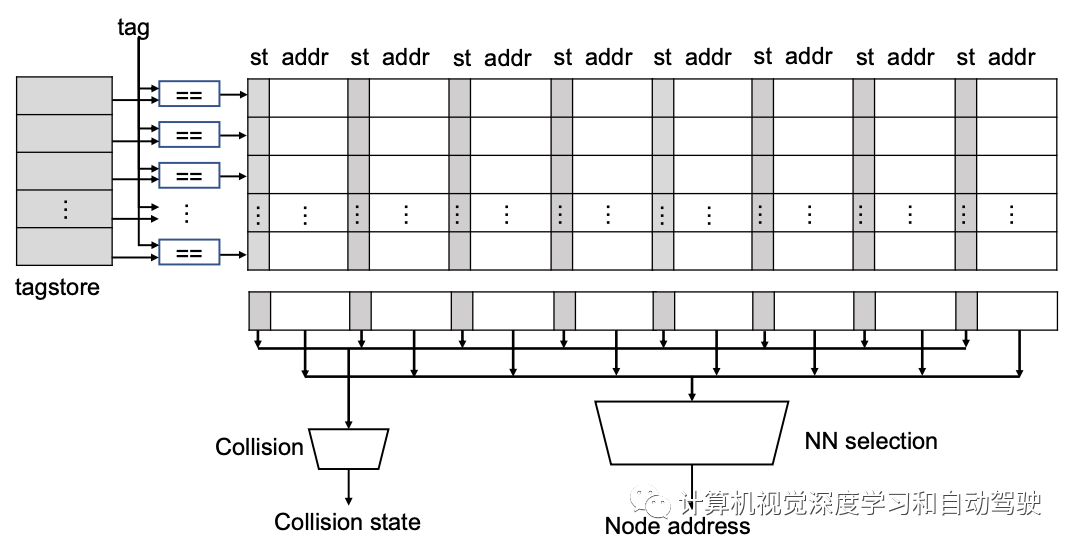
其中tagstore保存Morton codes,每行包含状态(碰撞/无碰撞)信息以及节点地址。对于碰撞状态,在一个memoryline的所有状态中,只要有一个状态指示碰撞,则输出是碰撞。
如图所示是Morton store的架构:CAM直接连接到CPU。
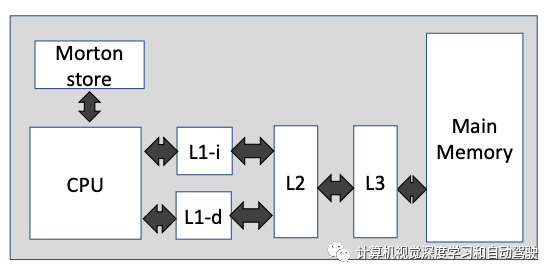
一旦命中(hit)后,将处理提取碰撞状态或节点地址相应的memoryline。如果未读取(read miss),在Morton store中不会修改任何内容。当未写入(write miss)时,最旧的参考memoryline被逐出。
为了在软件中访问此CAM并为不同的规划算法提供灵活性,定义了以下指令集架构(ISA)扩展。morton-update、morton-col和morton-nn,如下表。

-
指令morton-update获取节点的坐标及其碰撞状态,并在morton store中更新此信息。
-
指令morton-col获取节点的坐标,在CAM中查找,并确定是否存在碰撞。
-
指令morton-nn通过查找具有相同morton codes的记录,在morton store中查找近似最近邻的内存地址。
注:这项工作设定这些指令加速RRT。然而,也可以用于其他基于采样规划算法,如PRM。
-
合成测试用例
对于合成测试用例,采取一个正方形地图,其中动态障碍物运行。综合测试用例由三个参数表征,即动态障碍物的数量、方形地图的边长度和时间步数。求解路径应从(0,0)开始,目标是(l,l),其中l是方形地图的边长度。
在这个模拟周期的开始和结束,随机生成障碍物的开始和结束位置。对障碍物的中间位置进行线性插值。如图显示:是带5个动态障碍物、边长度为100和20个时间步的测试用例,从(0,0)到(100100)的解决方案路径以蓝色标记。
模拟12种配置,地图边长为{100,200},时间步长为{10,100},障碍物数量为{5,10,20}。比较基准RRT和Morton store软件RRT(sw-Morton)的总执行时间。对于每个配置,随机生成10个不同的测试用例。由于该算法是随机的,对于每个测试用例,重复实验10次,并显示平均执行时间。
如图显示执行时间的对比:
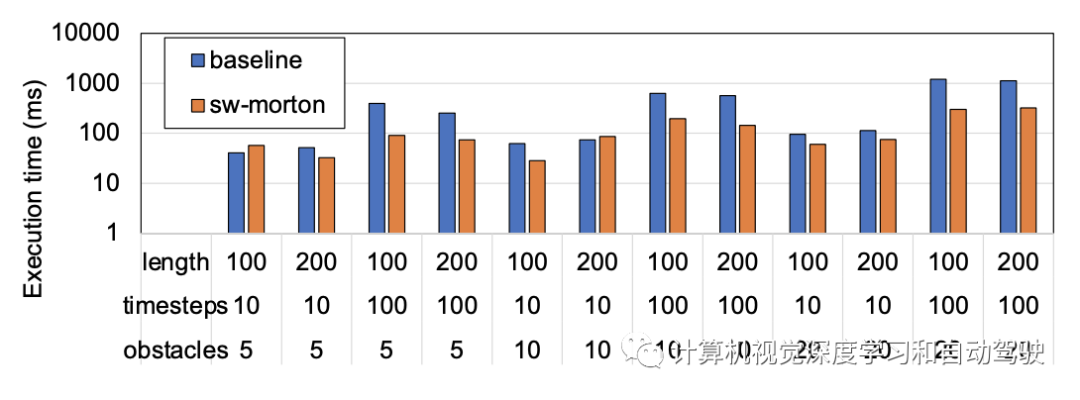
与基准RRT算法相比,基于软件Morton store的RRT路径规划平均减少了51%的执行时间。
-
硬件评估
提出的硬件辅助方法使用CAM快速查找和更新最近访问的树节点,进行最近邻搜索和碰撞检测。用GEM5模拟器(开源系统和处理器模拟器)评估这种基于硬件的Morton store的RRT算法性能。模拟器配置如下表所示:
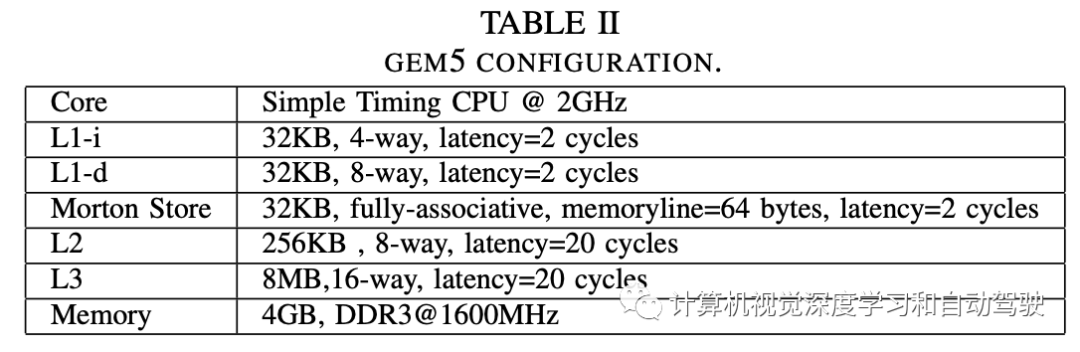
实现了HW Morton store和一个CPU与HW Morton store store之间的自定义端口,以便在GEM5中进行查找和更新。
与软件评估中使用的12种配置相同,如图显示基准RRT、基于软件Morton store的RRT(sw-Morton)和基于硬件Morton store的RRT(hw-Morton)的执行时间。
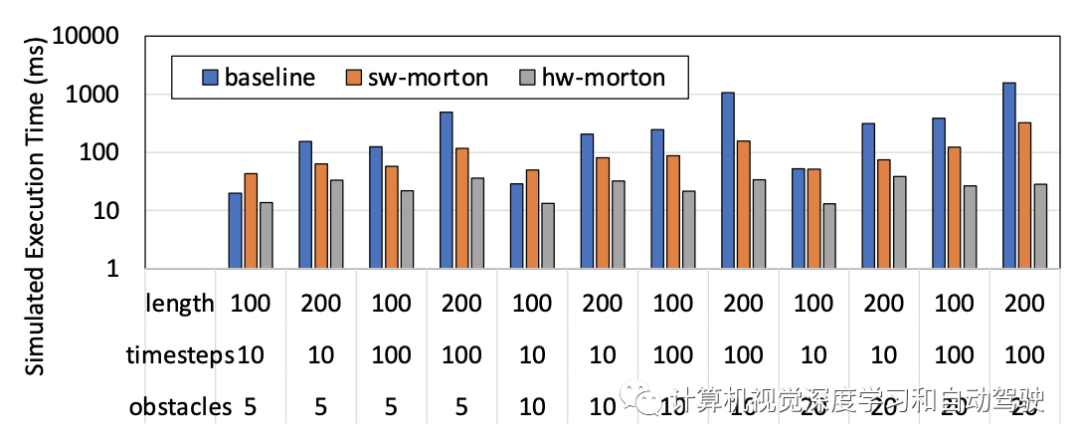
与基准RRT相比,基于软件Morton store的RRT性能平均提高了2.28倍,基于硬件Morton store的RRT性能平均提高了8倍。对于最佳配置,软件和硬件Morton Store的性能分别提高6.74倍和56.3倍。
如图显示基准RRT、基于软件Morton store的RRT和基于硬件Morton store的 RRT解决方案路径长度。
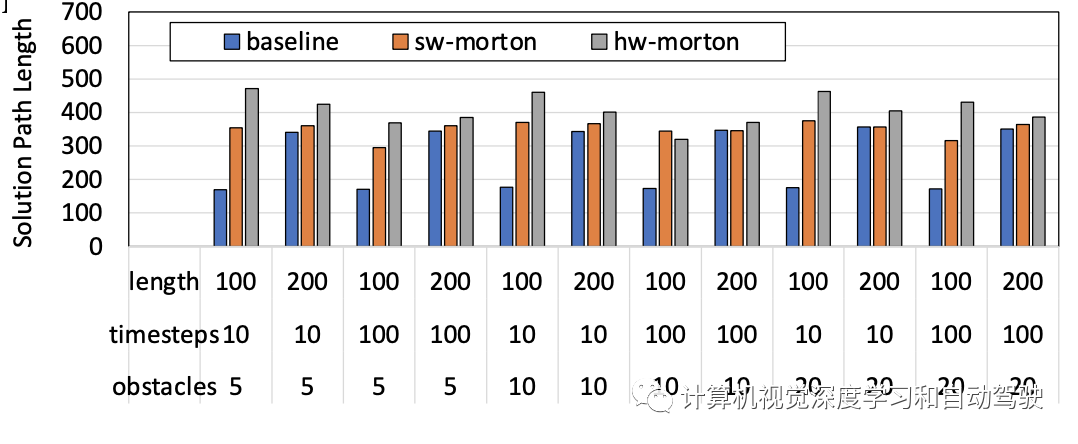
软件Morton store和硬件Morton store的平均RRT解决方案长度分别是基准RRT解决方案的1.42倍和1.65倍。这是因为SW或HW Morton store只能找到近似的最近邻,而不是精确的最近邻。因此,解决方案路径可能比基准波动更大。
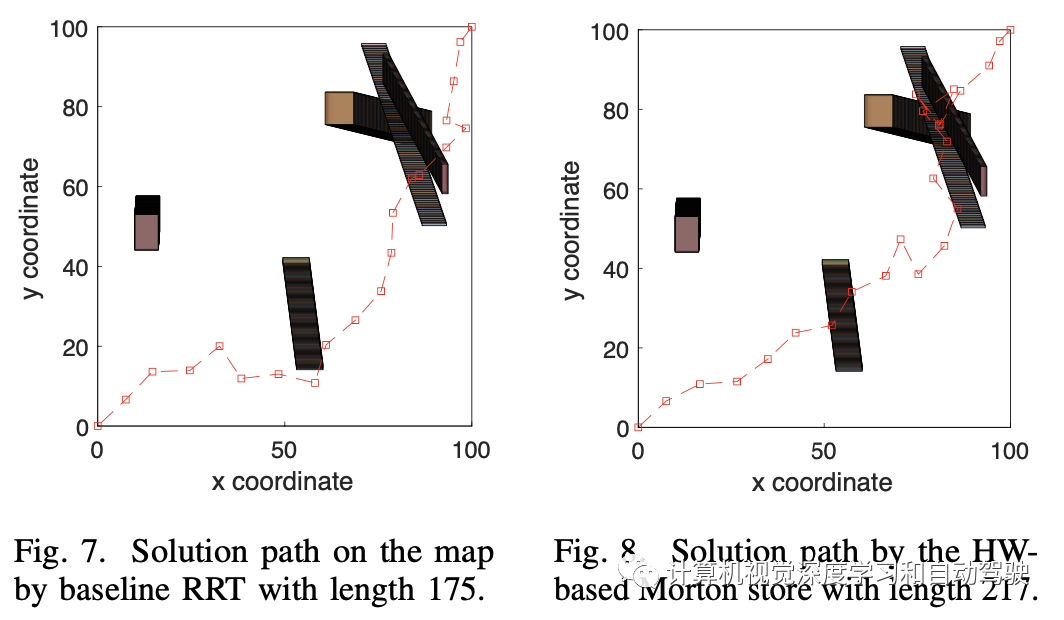
如下右图所示,在地图位置(80,80)附近,基于硬件的Morton store给出的路径在到达(100,100)之前来回移动。与下左图所示的基线解决方案相比,这增加了解决方案的长度。这样的路径可以使用细化算法(refinement)来减少总长度。
-
在Commonroad基准数据集的评估
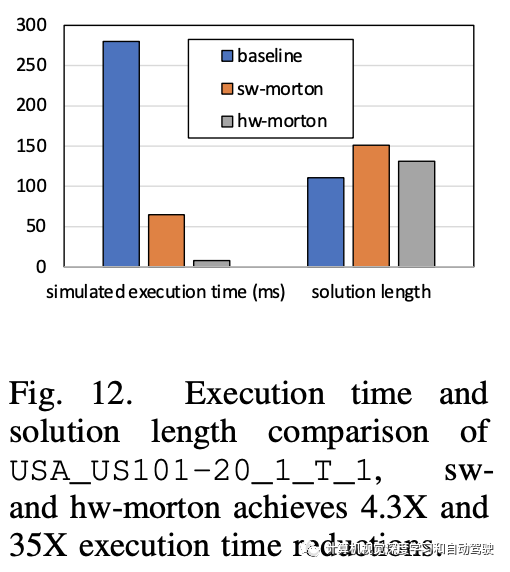
为了证明所提方法在现实场景中的有效性,用一个示例(USA\U US101-20\U 1\U T\U 1),如下图所示:其中包含Commonroad基准(“Commonroad: Composable benchmarks for motion planning on roads”. IEEE IV‘2017)的动态障碍物,其场景记录部分来自真实交通。
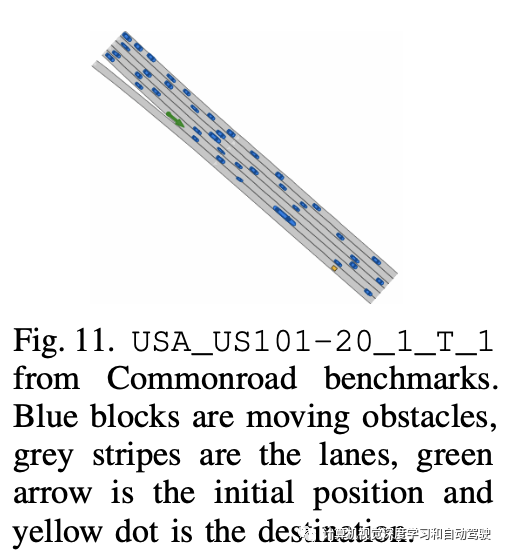
执行时间和解决方案路径长度如图所示,这证实了减少执行时间的有效性。



编辑推荐




最新资讯
-
组分性能对锂离子电池卷芯挤压力学响应的影
2025-04-30 09:00
-
美国发布自动驾驶新框架,放宽报告要求+扩
2025-04-30 08:59
-
中国汽研联合清华大学牵头编制的《乘用车避
2025-04-30 08:53
-
2025年汽车标准化工作要点
2025-04-30 08:51
-
关于Audio Precision音频分析仪产品价格稳
2025-04-30 08:51
