




 广告
广告





















































谈谈整车控制器的功能

整车控制器(简称VCU)是整车控制的核心控制器,通过CAN/LIN总线或者硬线,实现对电池系统、电驱系统、热管理系统等的管理(VCU的控制简图如图1所示),具体包括档位、加速踏板、制动踏板的控制,根据实时的动力电池电量,计算出需要输出的扭矩控制,整车的低压、高压的上下电、能量回收等控制,VCU的内部结构简图如2所示。
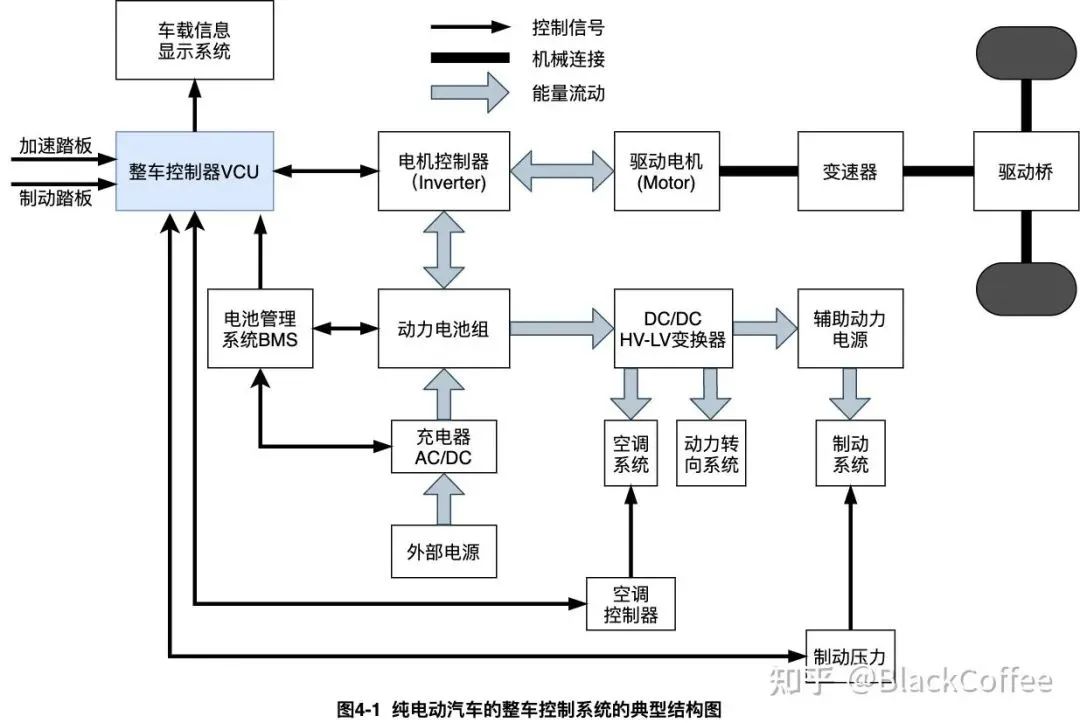
图1 VCU的控制简图(来源知乎)
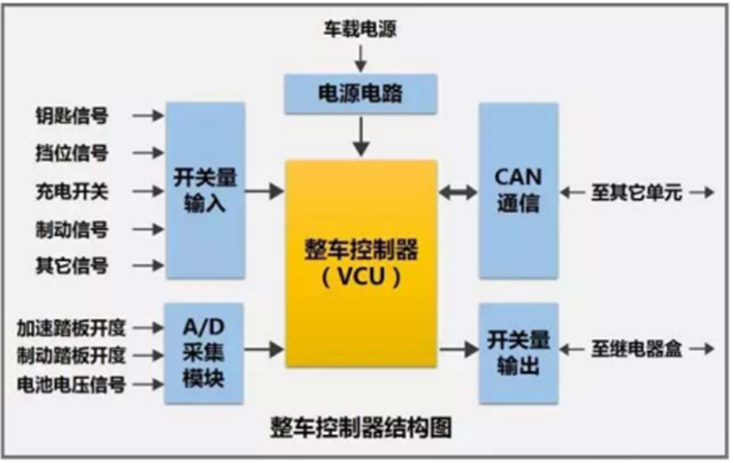
图2 VCU内部简图(来源网络)
详细来说说VCU的各项功能:
01.
档位管理在开车的时候,有没有遇到过有时候挂挡挂不上去,比如不踩刹车,是挂不上D档的。这个就是VCU控制的。当你在挂挡时,档位控制器将档位请求信号发送给VCU,VCU判断换挡条件是否满足,再执行档位切换。都有哪些条件呢?1、钥匙信号是否在ON档;2、整车是否上高压;3、低压蓄电池是否在有效范围内(比如9~16V);4、驾驶员是否系安全带、踩刹车;5、车速是否为零。档位的控制主要分为三个阶段,分别为上电阶段、正常运行阶段、下电阶段。在车辆上电时,VCU默认向档位控制器发送P档请求,并且在仪表盘上点亮P档指示灯。在车辆下电时,VCU会检测到车速达到要求时,发出P档请求。在车辆正常运行时,会检测上述的那些条件是否都满足,只有全满足后才能正常进行档位切换。主要的输入信号如下所示:输入信号:档位请求;当前车速信号,高压状态信号,钥匙信号,制动踏板信号。
02.
踏板信号管理
踏板信号包括油门和刹车,其是整车最重要的输入量之一,直接反映了驾驶员的操作意图,并且影响车辆和人员的安全,因此这两个信号通常是有冗余的,通常是各有两路独立的信号采集链路,在此基础上,还有很严格的错误检测机制,比如:1.当两路油门或者刹车信号的差值超过一定范围,则认为是踏板开度不同步,报踏板故障;2.当踏板传感器的供电电压不在正常范围,报踏板故障;
3.当两路信号电压不在正常范围时,报踏板故障;4.当油门和制动踏板同时请求时,优先响应制动踏板。当上述的前三条条故障中任意一条发生,VCU中使用该信号的软件模块不再使用该信号进行处理,并且车辆进入跛行,点亮仪表盘上的故障灯。
03.
局域网内网络管理如图1中,VCU负责局域网内控制器的上下电管理。当VCU收到钥匙信号时,VCU首先被唤醒,并且开始自检,自检主要包括上电过程中是否有故障报出、低压蓄电池电压是否在正常范围,自检通过后通过网络管理报文或者是KL15硬线,将局域网的控制器节点进行唤醒。下电过程则是,当VCU检测到钥匙信号OFF后,VCU首先停发网络管理报文,等待局域网内其他各节点都停发网络管理报文后,再一起停发应用报文,同步将进入下电休眠。
04.
车辆驱动管理车辆驱动管理包括驾驶模式管理,扭矩输出管理、定速巡航管理、自适应巡航管理等。驾驶模式管理主要是按ECO、NORMAL、SPORT三种模式来管理动力输出和功率输出。在ECO模式下通过限制功率输出、车速来降低能量消耗,达到节能经济的目的。NORMAL通常为整车默认模式,能耗、车速都相对均衡,运动模式下通常是默认整车设计的最大功率输入,提供强劲的动力表现。这些控制都是通过油门开度与不同的扭矩响应来达到的,在不同模式下有不同的映射表,也就是所说的map。在ECO模式下,扭矩输出比较柔和。在SPORT模式下,映射表中的对应值更高,也就意味着响应更加快速,动力来的更加澎湃。
VCU给电驱总成的扭矩请求值是根据三个值来确定的。其中之一为VCU根据不同驾驶模式下,标定的map表中当前转速对应的最大扭矩与油门开发的乘积。第二个为BMS在当前条件下最大的输出功率值。
第三个为当前转速下电驱总成能输出的最大扭矩值。VCU根据这三个值,选择其中最小的发送给电驱总成,进行扭矩响应。另外为了保证油门响应更加线性,在将扭矩请求值发送给电驱总成之前还会收扭矩变化率map影响。在ECO模式下,扭矩变化率更加平缓,则动力响应偏慢,比较柔和,SPORT模式下扭矩变化率比较激进,扭矩变化率更大,动力响应快。
05.
高压系统上下电管理高压系统(如图3所示)的上下电,在纯电车中,这是很重要的一环,首先高压存在安全问题,另外如果高压无法上电,车辆是无法开动的,类似于传统车上,发动机没有启动,车辆动不了一样。
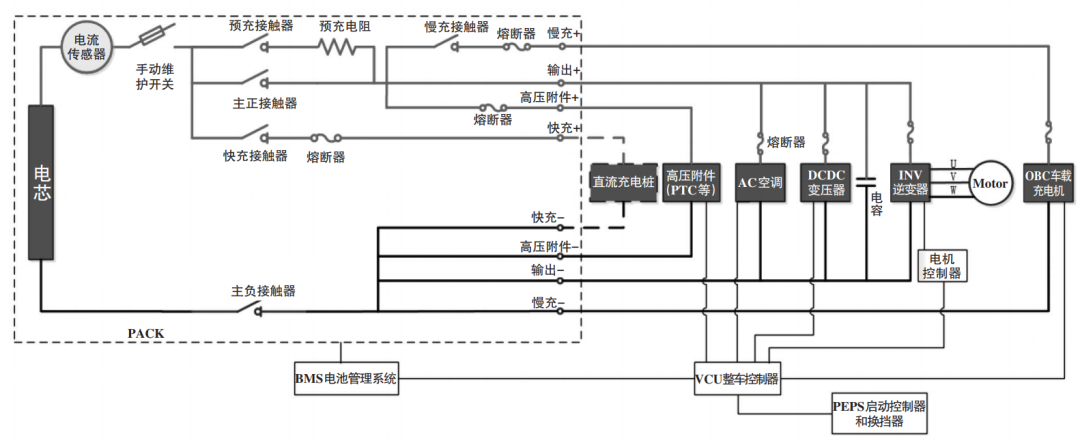
图3 高压系统电气图(来源知网)高压上下电需要满足的原则:1、避免车辆出现非预期的加速、减速、转向等动作;2、应避免因高压故障引起人员伤亡及设备损坏;3、满足高压上下电性能要求;首先高压上电功能需求主要包括:钥匙上电、直流/交流充电、远程控制(例如远程打开空调),这三种场景仅仅是唤醒的方式不一样,高压上电的逻辑和时序是差不多的。对于整个上电过程,通过会有时间要求,比如要求1s内局域网内各ECU(通常包括VCU、DCDC、DCU、BMS等)应完成上电流程,并进入工作模式。在上电流程中,首先是VCU被唤醒(钥匙唤醒、网络唤醒、或者充电cc信号硬线唤醒),启动后发送请求闭合HVIL回路使能线和必要的12V低压继电器的CAN报文,同时监控HVIL回路状态,然后DCU、DC/DC、BMS被唤醒(VCU发送的网络管理报文或者IG ON信号唤醒)并进行自检,监控HVIL回路状态,对于BMS来说还需计算绝缘阻值,确认绝缘是否正常,无故障后进入待机模式(standby状态)。随后VCU请求BMS闭合主继电器,BMS则先后闭合主负继电器和预充继电器,当检测到母线电压达到阈值后,判断预充电成功,然后闭合主正继电器,并断开预充继电器,到这则高压上电完成,在VCU请求BMS闭合主继电器时,同时也会请求DCU、DC/DC进入工作模式,时序图如图2所示。
为什么要预充呢?对于低压来说,例如平时用的电池或者是12V低压蓄电池,是不需要开关,直接拔电池不会有什么风险。但对高压而言,直接接电池是不行的,有可能会产生较大的冲击,烧坏功率器件。
预充是将预充电阻串联到高压回路中,由预充电阻分掉一部分电压,然后,随着各ECU内的电容充电上来,等到电压上升到某一阈值,主正继电器闭合,这样预充回路就完成了它的工作了,如图4。
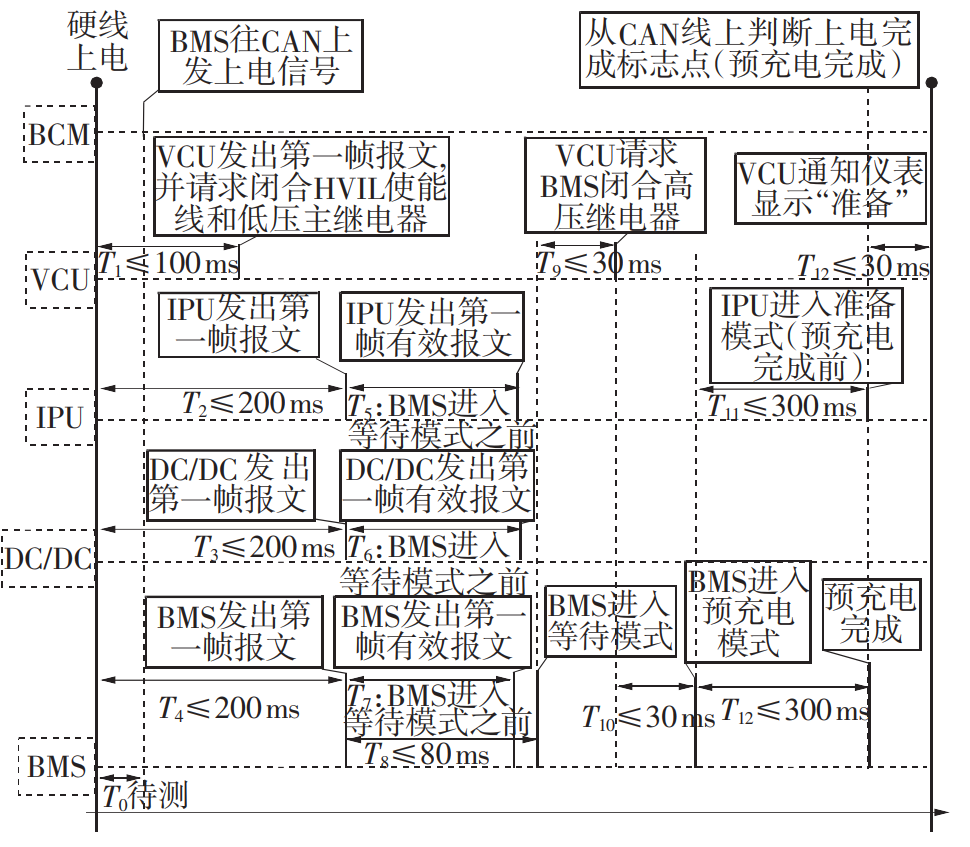
图4 高压正常上电时序(来源知网)在正常下电流程中,当检测到钥匙信号、硬线信号关闭或网络唤醒信号停发,VCU立即请求DCU离开工作模式,并且功率器件迅速降低功率,随后VCU请求DC/DC离开工作模式,然后VCU在请求BMS断开继高压继电器,BMS完成响应后,VCU断开HVIL回路和低压继电器,各节点进入下电休眠流程,如图5所示。
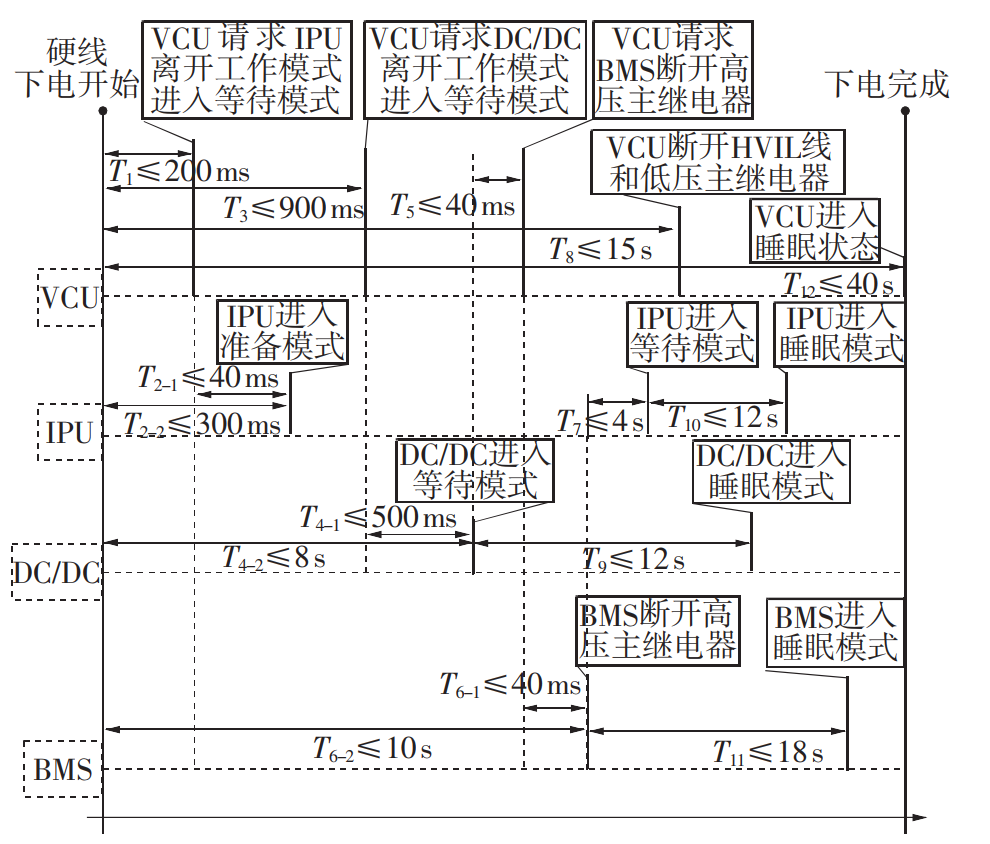
图5 高压正常下点(来源知网)在正常上电状态下,如果出现绝缘阻值低于阈值、高压互锁断开、IGBT过流等严重故障时,VCU会进行紧急下高压电流程,首先VCU请求DC/DC脱离工作模式,DCU进入failure模式,随后VCU请求BMS断开高压继电器,并且断开HVIL回路,随后 VCU 请求 IPU 进入紧急放电模式, DCU在规定时间内完成余电泄放, 若钥匙为关闭状态,则各节点进入休眠流程,如图6所示。
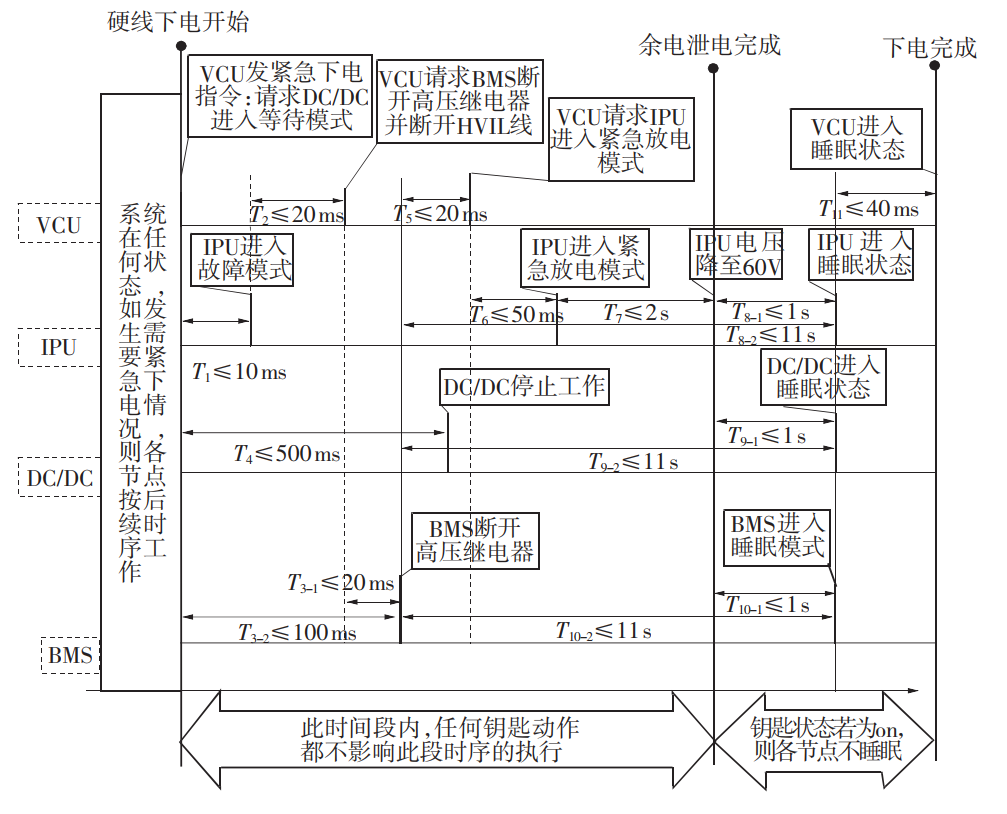
图6 高压紧急下电(来源知网)
06.
整车能量管理能量管理是VCU根据动力电池充放电能力、车辆运行模式、运行状态,以及各用电负载的优先级,实时调整各用电负载的功率。在常规工况下,各个用电负载的用电优先级为DCDC>电池制热/制冷>乘员舱制冷>乘员舱制热>电机功率;在急加速工况下,通过判断驾驶员是否有紧急加速意图,VCU的能量管理优先满足动力需求,限制空调等系统的工作。在动力电池馈电工况下,优先满足基本驾驶需求。空调系统功能会被限制。除了以上简介的之外,还有PTC的控制,自动驾驶中的定速巡航,自适应巡航都是需要VCU来实现的。
07.
VCU发展趋势在当前电子电气架构变革之际,VCU也将朝着集成化和域控化发展。集成化是指将整车控制系统中的部分控制功能集成到一个控制器中,例如比亚迪E3.0平台中的八合一,其就是将原来分开的VCU、电机控制器、BMS、车载充电器集成到一个控制器中,如图7所示。
图7 比亚迪E3.0平台的八合一
域控化是在集成化的基础上将VCU升级为动力域的域控制平台,更高性能的芯片将使其支持整车实现SOA服务架构,另外可以尝试更复杂的模型预测控制算法,让VCU对需求扭矩、能量分配和管理做更好,更加精准的控制和分配,从而达到整车电耗的优化,提升电车的续航里程。
参考:
https://mp.weixin.qq.com/s/Fyymq5tRGr0M4twG2xRgVw
https://mp.weixin.qq.com/s/lvTNgTAwzICE_WFrR_Ko5Q
- 下一篇:带有晃动水箱的移动车辆的晃动力特性
- 上一篇:某款混动车辆传动系统扭振设计及验证



编辑推荐




最新资讯
-
货车侧滑检测异常数据集群的成因分析 ——
2025-04-09 15:32
-
网络研讨会 | 4月16日HBK智能传感器
2025-04-09 12:21
-
褚教授课程笔记 | 工作变形分析(Operating
2025-04-09 12:19
-
深度讲解仰望U7水平对置发动机
2025-04-09 12:15
-
重磅!东风汽车重大突破
2025-04-09 12:15
