




 广告
广告





















































自动驾驶场景分类与编码标准组意向成员征集与项目启动会通知

编者寄语:2022年6月24日,C-ASAM将组织召开“自动驾驶场景分类与编码标准组启动会”,针对标准的框架、内容进行汇报与讨论,欢迎ASAM会员单位积极参与。
01为什么要进行自动驾驶场景分类与编码?
自动驾驶仿真及测试对于当前智能汽车的发展重要性已经不言而喻,并且已经取得了长足的发展与标准化。在德国PEGASUS项目研究成果中,首次提出了功能场景、逻辑场景与具体场景三大概念,对自动驾驶场景的设计与分类提供了指导性思路。
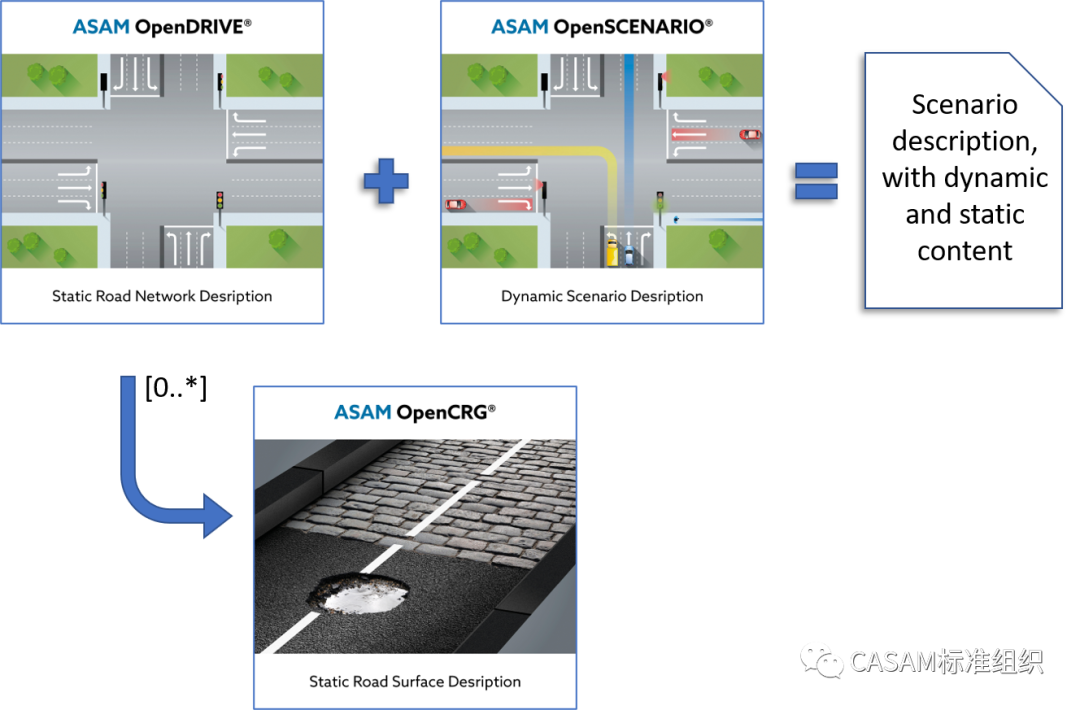
随着ASAM OpenDrive、Open Scenario、OpenCRG等标准的推出,自动驾驶具体场景的设计与分类已经有了相对完善的标准化思路,但是对于功能场景和逻辑场景的分类尚未形成行业共识,也会导致各个厂家与主体在进行自动驾驶功能定义时出现分歧,对特定功能认证的一致性与可靠性造成了更多困难。具体表现为:
● 面对大量的实车道路行驶数据,无法有依据地进行场景切片,也无法支持自动化对接仿真测试,降低仿真测试的效率;
● 面对现存和已有的自动驾驶场景文件,难以进行对比与归并,不利于档案管理;
● 面对已有的驾驶场景库,难以进行高效管理预筛选,数据库之间的专制与融合也难以实现。
因此,在已有的多个规定场景基本构成要素及其属性的相关标准(如ISO 34503)基础上,探讨更上一层的基于要素的场景分类应成为接下来的重点,形成行业接受度高的场景分类标准对于推动自动驾驶功能落地势在必行。
02自动驾驶场景分类与编码标准制定思路
场景分类编码中可以凝练地体现出原始数据中的关键场景信息及信息之间的关系,从而表征不同类型的场景。因此,自动驾驶场景分类与编码希望打通自动驾驶测试上下游之间的隔阂。
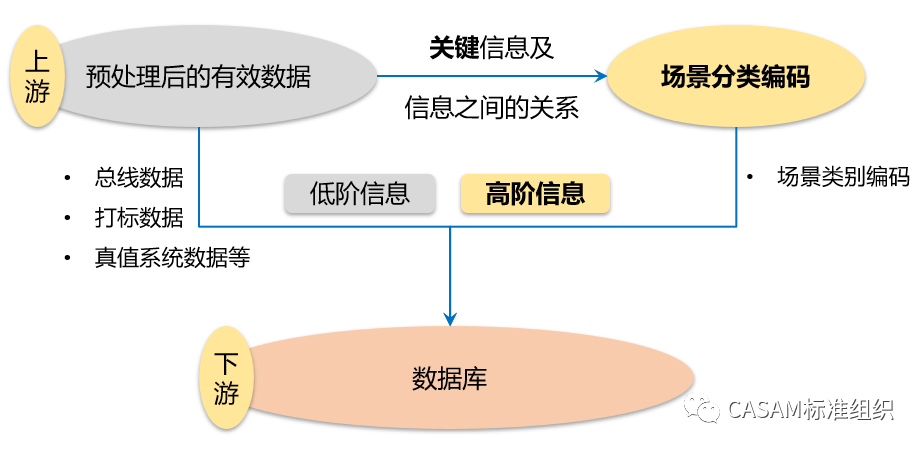
实车道路采集的原始数据(总线数据、打标数据、真值系统数据等)通过数据预处理之后,经过场景分类与编码,形成规范化的驾驶场景数据库,更好支持自动驾驶测试验证。
场景数据库支持内容包含:
● 场景数据切片;
● 场景分类管理;
● 支持多数据库的转置与融合;
● 支持对现有场景文件的对比与归并。
测试验证功能包含:
● 回灌测试,高效筛选测试片段;
● 场景泛化生成与测试;
● 功能安全与预期功能安全验证。
03自动驾驶场景分类与编码标准目标与指导原则
通过自动驾驶场景分类与编码标准化,希望实现的目标如下:
● 针对“短片段”场景进行编码,构成“场景类别字典”;即用一串编码高度浓缩 “短片段”场景信息,对其进行表征;
● 能够支持从功能定义到测试验证等各阶段的、对场景的一致化表述;
● 能够支持对实车道路道路行驶数据进行抽象和编码,支持data-based approach;
● 利用编码中的部分或全部编码的变动情况,可制定场景切片规则;
● 能够与其他独立要素(行驶区域/天气条件等)联合,设计数据库筛选规则;
● 能够指导有目的性的场景泛化,支持具体仿真场景的自动生成;
● 能够支持安全分析与测试验证。
标准化指导原则包括:
● 系统性:分类系统合理,每个场景编码唯一;
● 有用性:对场景的上下游进行支持,加快自动驾驶功能测试验证;
● 高效性:分类与编码集合最小化,避免冗余信息;
● 可行性:编码简明、可解释性高;
● 扩展性:编码柔性、可扩展,支持未来场景与功能的扩充。
04自动驾驶场景分类与编码标准工作组参与方式
自动驾驶场景分类与编码标准化项目由同济大学与C-ASAM工作组联合牵头组织,现开始征集参与意向单位。



编辑推荐




最新资讯
-
沃尔沃卡车与Greenlane合作推动商业电动化
2025-04-07 08:42
-
江铃晶马:美标转欧标充电结构专利
2025-04-07 08:39
-
EMC成为新贸易壁垒,零跑在乌兹被全面叫停
2025-04-07 08:37
-
Euro-NCAP 2026 鞭打规程解读
2025-04-07 08:36
-
汽车电子硬件开发常用的安全机制
2025-04-07 08:29
