




 广告
广告





















































法国AVEthics(自动驾驶汽车的伦理政策)项目成果解读

项目概述
自动驾驶汽车是汽车产业与人工智能、信息通信、大数据、物联网等高新技术及交通出行、城市管理等多领域深度融合的产物,为汽车产业带来了颠覆性变革。但是由于近年来在自动/辅助驾驶状态下出现的伤亡性交通事故、功能性缺陷等问题逐渐增多,使得人们越来越关注自动驾驶系统带来的伦理、法律等方面问题。
为了对自动驾驶汽车的伦理问题展开深入探索,提出社会可接受的政策建议,法国国家研究局于2016年10月,投入经费15万欧元,开展AVEthics(Ethics policy for automated vehicles,自动驾驶汽车的伦理政策)项目。AVEthics项目从伦理问题理论分析以及计算机情景模拟两方面入手,以伦理理论分析为支撑构建计算机情景模拟,以计算机情景模拟结果为依据修正伦理理论分析,通过设计典型伦理场景,分析自动驾驶伦理问题,形成了完整研究闭环。该项目在研究思路和方法等方面极具借鉴性。
一、伦理问题理论分析
1、自动驾驶伦理发展现状
自动驾驶技术尚不成熟,层出不穷的智能驾驶车辆交通事故不仅打击了人们对自动驾驶的信心,由此引发的伦理问题也成为了社会热点话题,甚至可能成为阻碍自动驾驶推广应用的一大障碍。
道德偏好、用户偏好的多样性给自动驾驶伦理体系的建立带来了极大困扰。过去的研究方法大多将自动驾驶伦理困境视为“电车问题”,很少有构建适应自动驾驶复杂场景、展现多方伦理状态的模型,所以研究进展不佳,产生了技术与伦理联系不够紧密的情况。
2、自动驾驶伦理核心要点
自动驾驶伦理问题的核心原则是在综合考虑交通事故发生率和交通事故产生后果等因素后,作出风险最小化的判断。但由于公众价值观与社会道德属于主观意识范畴,难以采用统一标准衡量,因此无法清晰界定风险最小化判断的概念,进而带来了伦理困境。本项目提出“伦理效价理论(Ethical Valence Theory)”,即通过平衡公众接受能力与道德准则的关系,解决自动驾驶伦理困境。
“伦理效价理论”认为所有道路使用主体都会对自动驾驶车辆行为产生一定的影响,不同主体通过对自动驾驶车辆行为的影响来体现自身价值,不同主体的自身价值即为效价,通过伦理推理方法结合各主体效价,得出自动驾驶车辆的决策模型,进行风险最小化的判断。
3、典型伦理用例
“伦理效价理论”需要对不同的道路使用主体分别建立模型。因此在典型自动驾驶伦理场景中,以人和车分别建立用例。若以车作为行为主体,其在整个场景中的效价变动因素主要来源于碰撞和交通法规,因此分别对碰撞和交通法规建立用例。若以人作为行为主体,不同身份的人所受的伤害不同,例如驾驶员在事故中的伤害小于行人;不同年龄的人对伤害的承受能力不同,例如同样的碰撞,老人的骨折概率要大于成年人。因此人的用例主要从年龄、身份两个因素进行设计(表1)。
表1 人用例情况说明
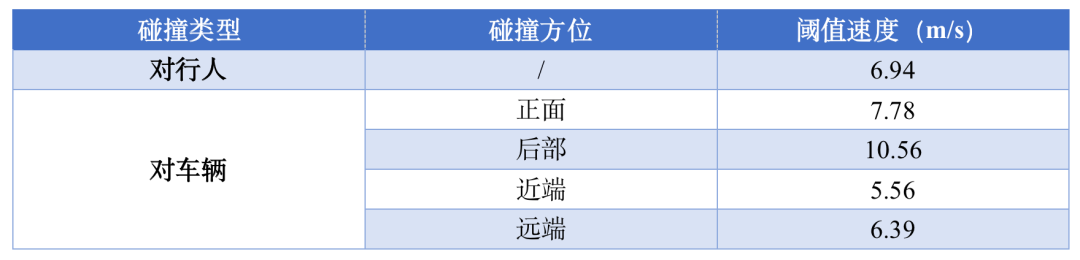
不同的碰撞主体、碰撞方向、碰撞速度会造成不同的伤害,例如同一碰撞对车而言是简单的剐蹭,但可能对人造成严重伤害;同一碰撞对车辆撞击方位的不同将导致不同的受损结果;不同的碰撞速度也会导致不同的后果,需要设置阈值速度。因此碰撞用例主要从碰撞类型、碰撞方位、阈值速度三个因素进行设计(表2)。
表2 碰撞用例情况说明
由于现实生活中的交通法规极为复杂,对所有的交通法规建立用例是不现实的。因此本项目选取最为经典的不要驶入对面的车道、不要驶入人行道、不要超过速度限制三个交通法规,以点带面,完成对交通法规用例的设计。
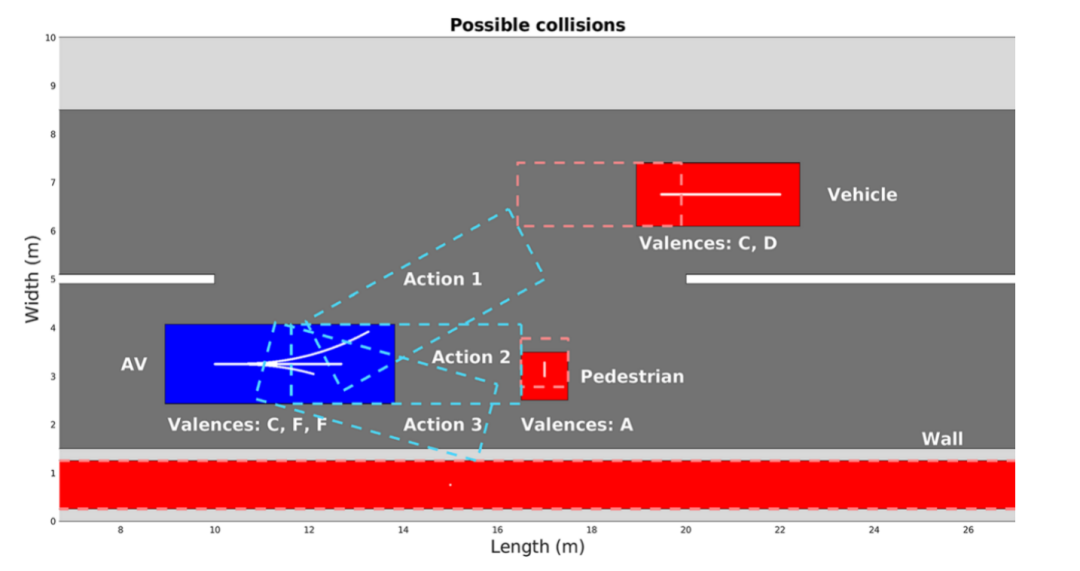
基于人用例、碰撞用例和交通法规用例,本项目设计了用例场景(图1):红色车辆为伦理场景中的决策车辆,其对向车道是黄色车辆,前方是行人,右侧是墙。由于该场景中的碰撞是无法避免的,构成了典型的伦理困境场景。

图1 用例场景
二、计算机情景模拟
AVEthics项目的计算机情景模拟基于WeBots机器人仿真平台实现,首先将伦理理论分析所建立的用例进行数学建模,其次基于逻辑推理方法对自动驾驶车辆的道德特征进行设定,最终使用仿真平台得出运行结果。
1、建模方法
基于伦理问题理论分析所得出的用例及用例场景,建立伦理场景数字化建模示意图(图2):图中AV代表的是自动驾驶决策车辆(蓝色),正在向前行驶;P1、P2代表的是行人,正在横穿马路;VEH代表的是对向车道的车辆(红色),正与自动驾驶车辆迎面相向行驶。
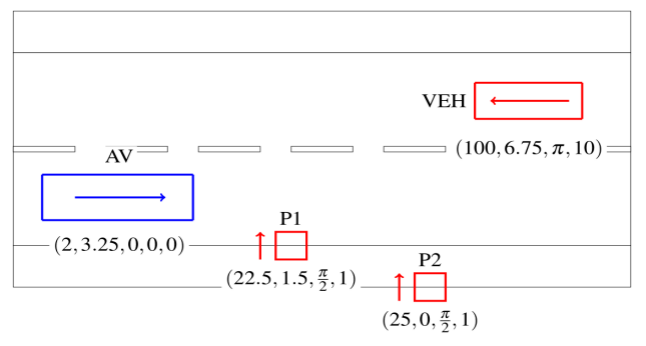
图2 伦理场景数字化建模示意图
同时,设置奖励函数对自动驾驶车辆行为进行评估,进而得出自动驾驶车辆的决策。奖励函数主要从两方面考虑,是否遵守交通规则和相对于其他道路使用主体的距离,若遵守交通规则或保持与其他道路使用主体的安全距离,则奖励函数结果越好。此外,奖励函数将是否超速、对向车道是否存在车辆、车辆是否在人行道上等因素都纳入评估指标。图3展示了基于奖励函数得到的自动驾驶车辆(蓝色)的决策。
图3 自动驾驶车辆决策
决策一是撞上红色车辆以避免撞击行人,但此选择会给对向车辆以及自动驾驶车辆本体带来损害。决策二是撞击行人,此选择对自动驾驶车辆本体损害相对最小,但会给行人带来巨大伤害。决策三是撞墙,此选择虽然对行人和对向车辆没有伤害,但对自动驾驶车辆本体的损害将最大化。最终自动驾驶车辆(蓝色)作出哪种决策,将由计算机进行模拟并给出结果。
2、推理方法及道德特征
AVEthics项目主要使用了三种推理方法以实现不同情景下的伦理推理过程:
▶契约主义。各道路使用主体不增加对其他主体的伤害,那么整个应用场景的预期损害将最小化。
▶功利主义。综合考虑各道路使用主体的行为对所有道路使用主体的伤害,选择预期伤害最小的行为。
▶平等主义。每个道路使用主体所受的伤害大致相同,不存在较大的差异。
综合考虑以上三种推理方法,AVEthics项目设计了两类自动驾驶道德特征:
▶风险规避的利他主义。该特征的核心思想是如果并未对自动驾驶车辆乘客构成严重风险,则最大程度保护其他道路使用主体,反之只保护自动驾驶车辆。
▶阈值利己主义。该特征的核心思想是只要对效价高于自动驾驶车辆的其他道路使用主体未构成严重风险,则保护自动驾驶车辆,反之保护效价高的主体。
3、模拟结果
基于用例建模及设置推理方法,得出了不同场景下情景模拟相关数据与结果。图4展示了其中一种场景的情景模拟过程及结果(自动驾驶车辆车速<阈值速度)。
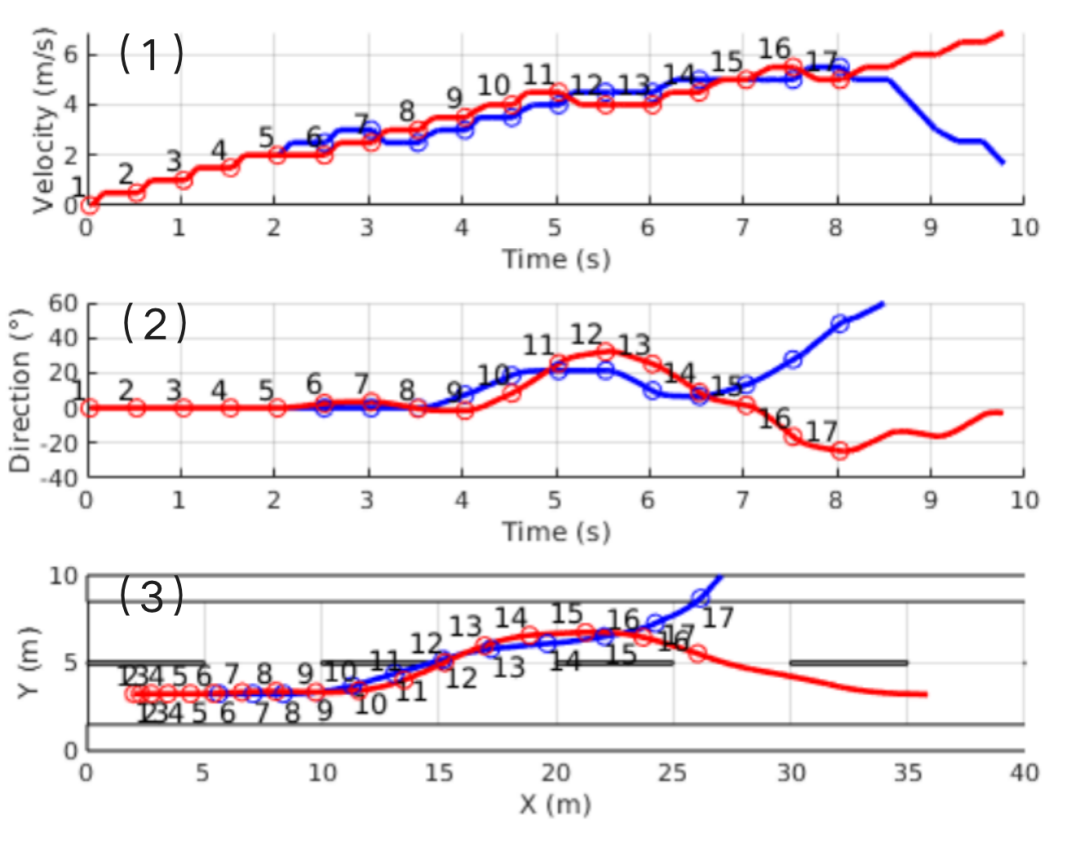
图4 情景模拟数据及结果
图4中蓝线代表具有风险规避的利他主义道德特征的自动驾驶车辆,红线代表具有阈值利己主义道德特征的自动驾驶车辆。数字标点用于标记自动驾驶车辆在同一时刻速度、方位及行驶轨迹状态。图4(1)的纵轴为车辆速度,横轴为时间,记录了不同时间下的车速情况。图4(2)的纵轴为方位,横轴为时间,记录了不同时间下车辆偏离原定方向的程度。图4(3)横纵坐标皆为位移,记录了车辆实际的行驶轨迹。
从图4(1)可以看出,在整个情景模拟过程中,两种道德特征的自动驾驶车辆最大时速均未超过6m/s,即低于表2中的阈值速度,因此在该伦理情景中的两种道德特征自动驾驶车辆均处于车速过低状态。同时,蓝线自动驾驶车辆在标点17后车速大幅下滑,因此可以初步判定该车撞墙或撞车;而红线自动驾驶车辆的速度趋势并没有发生较大改变,因此可以初步判定撞到行人。
从图4(2)可以看出,红线自动驾驶车辆在标点9方向发生较大偏离,而从标点12方向开始回正,并在标点17后逐渐回归正常,考虑到三种情况(撞墙、撞车、撞人)中只有撞到行人才不会对自动驾驶车辆行驶状态造成较大影响,所以再次判定红线自动驾驶车辆撞到行人;而蓝线自动驾驶车辆在标点17后失去数据记录,因此判定蓝线自动驾驶车辆撞墙或撞车。
从图4(3)可以看出,红线自动驾驶车辆在标点17后行驶轨迹逐渐正常,蓝线自动驾驶车辆则越过了y轴上界,即驶出了道路。结合图4(1)(2),最终判定红线自动驾驶车辆撞到行人,蓝线自动驾驶车辆撞墙。以此模拟场景为例,进行不同情景模拟并汇总结果,得到自动驾驶决策关系矩阵(表3)。
表3 自动驾驶决策关系矩阵
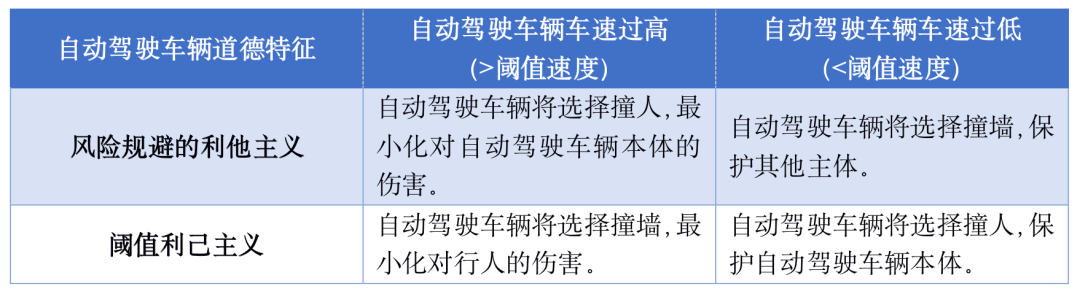
如表3所示,不同车速下,不同道德特征的自动驾驶车辆将作出不同的驾驶决策。
当车速过高时,具有风险规避的利他主义道德特征的自动驾驶车辆将选择撞人,因为该道德特征在面临本体遭受严重损害的情景时,将作出保护自动驾驶车辆本体的决策;而具有阈值利己主义道德特征的自动驾驶车辆将选择撞墙,因为此时效价高于自动驾驶车辆的行人将遭到严重风险,自动驾驶车辆将作出保护行人的决策。
当车速过低时,具有风险规避的利他主义道德特征的自动驾驶车辆将选择撞墙,因为此时自动驾驶车辆本体不会遭受严重损害,自动驾驶车辆将作出保护其他主体的决策;而具有阈值利己主义道德特征的自动驾驶车辆将选择撞人,因为此时效价高于自动驾驶车辆的行人不会遭受严重损害,自动驾驶车辆将作出保护车辆本体的决策。
三、项目成果与不足
AVEthics项目的贡献主要体现在以下三个方面:
▶技术方面,搭建了自动驾驶伦理情景模型,通过模型对自动驾驶决策、多种道路使用主体等方面进行了量化分析。
▶政策方面,基于“伦理效价理论”,对自动驾驶伦理问题进行了系统分析,构建了较为完善的自动驾驶伦理框架。
▶测试方面,采用模拟软件对不同伦理情景进行模拟并输出结果,具有较高的参考价值。
但是AVEthics项目也存在以下不足:
▶AVEthics项目核心是对伦理问题的理论分析和进行计算机情景模拟,虽然对社会接受度进行了一定探讨,但并没有根据其建立的伦理框架进行社会接受度分析。
▶AVEthics项目的研究更多处于“原型系统”状态,构建的伦理情景较为简单,考虑的社会因素、道德因素、法律法规等不够全面,难以应对场景更加复杂的伦理分析。
AVEthics项目为我们提供了一种可行的思路研究自动驾驶汽车的伦理问题,但是鉴于我国的交通和道路情况相比国外更加复杂,因此需要建立跨行业联合研究小组,因地制宜的展开中国智能网联汽车伦理问题的探索,支撑产业发展和社会接受度提升。
针对智能网联汽车发展的重大问题,国家智能网联汽车创新中心持续开展相关政策法规、技术路径及示范应用项目等的课题研究和解读,欢迎行业单位联合参与,共同突破行业难题,助力我国智能网联汽车发展。
作者:国家智能网联汽车创新中心法规标准部 厉欣林 王睿







最新资讯
-
全球首次!IVISTA 2023版修订版引入带灯光
2025-04-28 09:59
-
我国首批5G毫米波行业标准送审稿审查通过
2025-04-28 08:56
-
5/16 厦门- 新能源汽车电驱测试技术的创新
2025-04-28 08:53
-
国内首个汽车电磁防护技术验证体系EMTA正式
2025-04-28 08:49
-
一文带你了解滤波器
2025-04-28 08:35
