




 广告
广告





















































功率分析仪平均功能如何区别运用?

横河的功率分析仪都有一个平均功能,这个功能包含两种平均化方法,分别是指数平均和移动平均(也叫线性平均)。平均功能针对电源或负载的变动较大或输入信号的频率较低时数值显示不稳定、读取困难的情况有效。虽然都有详细的计算公式说明,但很多工程师在实际使用中往往无法区分这两种平均化方式,以及使用使用场景上的区别,本文通过计算图表做简单的说明。
首先,简单介绍这种平均化的公式:
指数平均
可以通过设定的衰减常数将数据指数平均,并根据以下公式求得平均值。
Dn: 经过第n次指数平均后显示的数值(第1次显示的数值D1等于M1)。
Dn–1: 经过第n-1次指数平均后显示的数值。
Mn: 第n次的测量数据。
K: 衰减常数(从2、4、8、16、32、64中选择)。
移动平均
可以通过设定的平均个数将数据线性平均,并根据以下公式求得平均值。
Dn: 将第n–(m–1)次到第n次的m个数值数据线性平均后显示的数值
Mn–(m–1): 第n–(m–1)次的测量数据。
……
Mn–2: 第n–2次的测量数据
Mn–1: 第n–1次的测量数据
Mn: 第n次的测量数据
m: 平均个数(从8、16、32、64、128、256中选择)。
如果只是粗略地看这两个公式,虽然运算上有很大的区别,但无法让工程师直观地理解这种平均化运算对实测测试结果有多大的影响,具体平滑处理到什么程度,衰减常数应该如何选择。下文选取了一段WT5000的DS功能记录的原始波形,利用EXCEL将两种平均方式按不同的衰减常数做了简单的运算,并将运算结果与原始波形一起做对比。
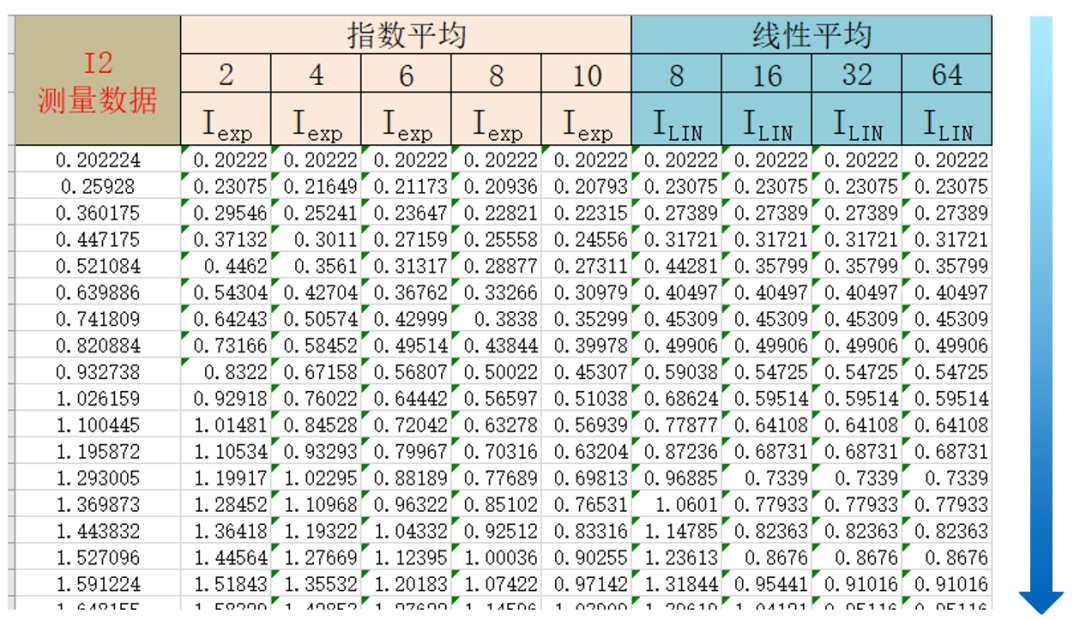
因为涉及运算量比较多,这里就选取了指数平均衰减常数2、4、6、8、10,移动平均衰减常数8、16、32、64为例。上图中截选了一小部分的运算结果,当然我们只是从这个运算结果无法对这两种平均化方式有任何直观的认识,那么把所有的运算数据导入二维图表,就能比较清晰的看出区别了。
指数平均&移动平均运算结果
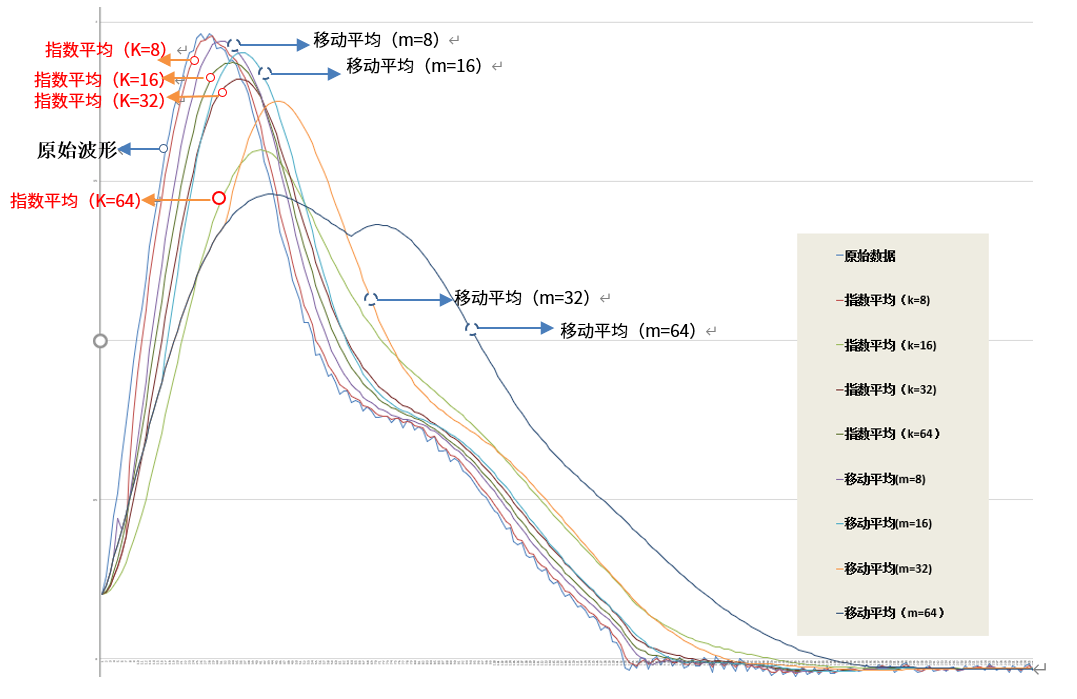
首先,原始波形在尖峰部分以及下降部分有锯齿形状的波动,无论是指数平均或移动平均采用8以上的衰减常数,都能很好地平滑波形曲线。但移动平均在最低8的衰减参数影响下会出现明显的相移,随着衰减次数的增加,相移与尖峰部分的平滑会急剧上升。与移动平均相比,指数平均虽然随着衰减常数递增,也会出现相移以及波峰的平滑,但总体来说,波形的形状并不会有明显的改变。
本文为了做对比,采用了较大的指数平均衰减常数(移动平均衰减常数只能选择8、16…..),而实际测试中,我们可以设置较小的指数平均衰减常数如2、4、6等,这样的话对于波峰的平滑以及相移可以做到较好的权衡处理。实际应用中,因为原始数据是积分处理后RMS或者有功等值,波动很少会如案例中这么剧烈,如果只是针对突发性的数据波动,可以采用较低次数的指数平均,平滑数值曲线,对于实际读数也不会有明显的延迟。但如果对于较为剧烈波动的数值曲线平滑处理,可以考虑采用高次数的指数平均或者低次数的移动平均。对于移动平均的衰减参数选择需要谨慎处理,较大的衰减参数会完全改变测量数值的波动曲线,导致错误的测量结果。更多技术详情,欢迎联系横河工程师。



编辑推荐




最新资讯
-
腾势N9通过鱼钩测试的关键技术
2025-04-21 14:05
-
腾势N9鱼钩测试中的具体表现
2025-04-21 14:03
-
鱼钩测试的行业意义与历史成绩
2025-04-21 14:02
-
鱼钩测试的原理与流程
2025-04-21 14:02
-
邀请函 | 智能声振:NVH及语音音频质量技术
2025-04-21 11:23
