




 广告
广告





















































多个毫米波雷达传感器相互干扰及其解决方案(基于TI毫米波雷达)

1. 概述
在汽车和工业等环境中,部署TI的AWR和IWR系列雷达会随着时间和需求的增加而增加,因此一个雷达的发射信号被另一个雷达接收到的可能性也会随之增加。不同的雷达传感器之间的干扰可能会对雷达造成灾难性的后果,例如,导致漏检、产生盲区、检测范围缩小以及出现虚假目标等,稳定可靠的雷达需要降低或者完全避免多个雷达传感器间的相互干扰。文章主要讲述了:
(1)FMCW雷达中不同类型干扰的产生机制。
(2) 避免干扰以及抑制干扰的解决方案。
2. FMCW干扰类型
2.1 FMCW雷达概述
在FMCW雷达中,射频前端会产生并发射一个线性调频的chirp信号,如图1所示。发射的信号从其视场内的目标反射回来并被接收天线接收,所接收的信号是发射信号的时间延迟信号。然后对接收信号和发射信号进行混频,最后带通滤波以及ADC采样。
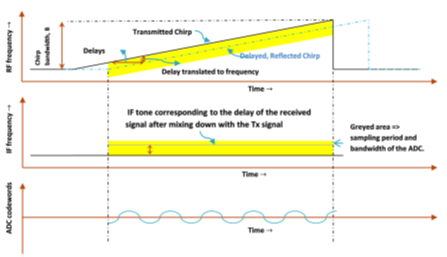 图1 线性调频信号
图1 线性调频信号
由于接收信号是发射信号的时间延迟信号,所以混频后得到一个近似的单频正弦信号,且频率与距离呈正比关系。通过傅里叶变换可以获得混频后的单频正弦信号的频率,并解算出目标的距离。因此,雷达能够检测到的最大距离受到中频带宽的限制,如果目标的频率超过中频带宽,就会被滤波器过滤掉。
2.2 雷达干扰方程
假设存在两个雷达,我们这里分别称为干扰雷达和被干扰雷达,设干扰雷达和被干扰雷达之间的距离为R,平均射频信号的波长为λ,则被干扰雷达受到干扰的信号强度可以表示为:

其中,Ptx是干扰雷达的发射功率,单位为dBm。TxantGain是干扰雷达的发射天线增益,单位为dB。RxantGain是被干扰雷达的接收天线增益,单位为dB。
针对目标的雷达方程可以表示为:

比较两个方程可以看出,干扰的路径损耗效应(即R效应)要比目标的路径损耗效应弱,换句话说,即使接收到的信号很远(两个雷达距离R很远),依然会存在干扰。
2.3 干扰类型
2.3.1 交叉干扰
如果被干扰雷达和干扰雷达具有不同的调频斜率,则两种chirp会相互交叉。当交叉发生时,被干扰雷达会受到交叉干扰。干扰雷达的发射信号与被干扰雷达的发射信号混频,当只有两者的频率差位于被干扰雷达的中频带宽范围内时,被干扰雷达才能够观测到干扰雷达的信号。
如图2所示,当干扰雷达的chirp信号穿过被干扰雷达发射的chirp信号时,通过混频得到一个具有负频率、零频率以及正频率的混合信号。
滤波后得到零和正频率部分,其中正频率是递增的,即近似为一个“chirp信号”。上述仅仅是一种情况(被干扰雷达发射信号斜率大于干扰雷达发射信号斜率),还有小于的,读者自行分析。
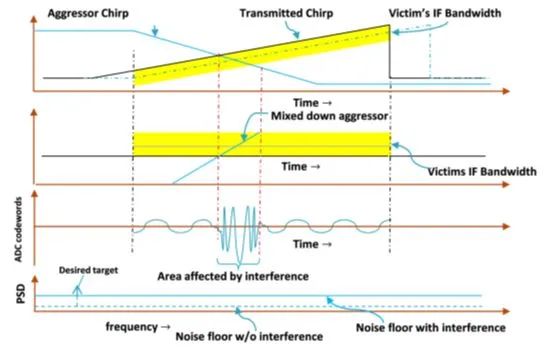 图2 交叉干扰模型
图2 交叉干扰模型
在频域上,对ADC采样信号做傅里叶变换后,交叉干扰通常会使噪声电平增加,降低强目标的信号比,淹没弱目标,从而影响雷达的检测性能,产生瞬时盲点。其中,干扰持续时间由被干扰雷达的中频带宽和被干扰雷达发射信号斜率以及干扰雷达发射信号斜率决定,可以表示为:

通常干扰的持续时间都很短,例如,中频带宽等于12MHz,发射信号斜率为40MHz/us,干扰持续时间约为0.3us,则ADC采样点最后4个点将受到干扰的影响(即ADC采样的最后4个点代表的距离受到影响)。
2.3.2 交叉干扰性能分析
根据文献[1],相对于热噪声的干扰噪声电平可以表示为:

假设,干扰雷达的输出功率为10dBm,那么被干扰雷达的接收功率可以表示为:

假设天线总增益等于14dB,噪声系数等于14dB,在此条件下,计算不同条件下的噪声电平增量如表1所示。
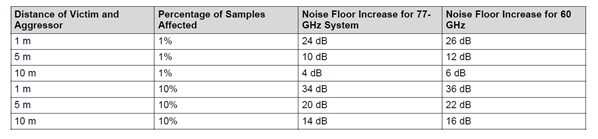 表1 噪声电平增量
表1 噪声电平增量
当两个雷达面对面,相距比较近时(1m)两个雷达之间的调频斜率差会变小。如前所述,当调频斜率差变小时,受影响的ADC采样点数增加,但交叉干扰事件本身发生的概率会降低,因此每帧数据中只有较少的chirp会受到交叉干扰影响,因此如表1所示干扰的概率仅有1%。
2.3.3 并行干扰
当干扰雷达和被干扰雷达发射信号具有相同的调频斜率时,只有当干扰雷达和被干扰雷达之间的起始时间非常接近,且干扰雷达chirp信号位于被干扰雷达chirp的中频带宽内时才会发生干扰现象,如图3所示。
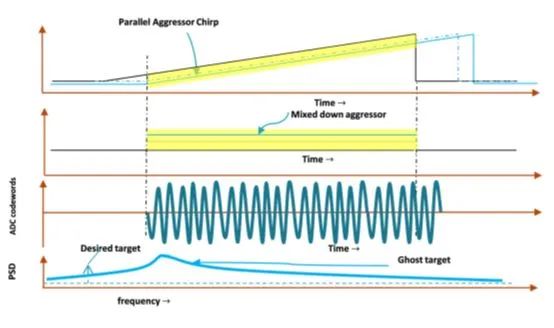 图3 并行干扰模型
图3 并行干扰模型
当与发射信号混频时,并行干扰在ADC数据中成为一个恒定频率的信号,在对ADC数据进行傅里叶变换后,在频域中它就变成了一个虚假目标。也就是说,它相当于一个随机距离和随机速度的虚假目标。这种干扰被称为并行干扰,干扰区域几乎位于整个chirp中。
然而,并行干扰发射的概率非常小。如图4所示,只有当两个雷达几乎同时启动时,干扰雷达的信号出现在被干扰雷达的中频带宽中,才会发生并行干扰。否则,干扰雷达的信号会被被干扰雷达的滤波器滤掉。
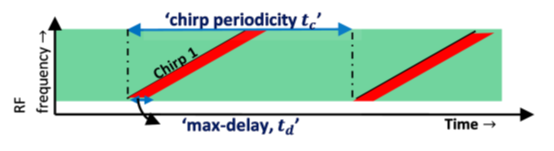 图4 并行干扰
图4 并行干扰
并行干扰的发生概率Pintf可以表示为:
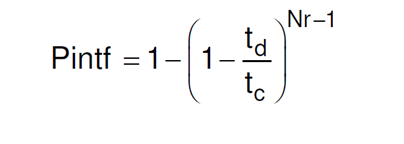
Nr为场景中的雷达数量,tc为chirp重复周期,td为并行干扰的最大延迟时间。例如,在超近程雷达中,假设最大距离为20米,td为0.13us。在这种情况下,只有当两台雷达相距在0.13us内启动时才会发生干扰。假设chirp持续时间tc为100us,且该区域内有10台雷达工作,当占空比为100%时,干扰概率仅为1.3%。如果每台雷达的占空比仅为10%,则干扰的概率将进一步显著降低。
当被干扰雷达和干扰雷达有独立的本振(LO)时,即使用户在chirp配置参数中给定设置相同的调频斜率,也很难得到精确的调频斜率。在这种情况下,虚假目标看起来不再像是一个干净的目标,而是在距离-多普勒谱中会产生很多嘈杂信号,由此可以用于识别是否发生了并行干扰的情况。
2.3.4 交叉干扰与并行干扰比较
交叉干扰经常发生,但是仅仅影响chirp信号中的一小部分采样点,并行干扰很少发生,但是却影响整个chirp信号。因此,随着chirp调频斜率差的减小,脉冲持续时间变长,交叉概率会减小。
3. 抗干扰方案
3.1 标准化:不同的雷达设置不同的频段和时隙
第一种方法是标准化。标准化指的是频率规划和chirp设计,以及时隙管理。基于分辨率要求的频率规划,使不同的雷达在不同的射频频段共存,例如,AWR系列设备的射频带宽为4GHz,可以分为2GHz被两个雷达同时使用。
另一方面,相邻帧之间通常存在一段空闲时间,没有任何chirp信号,如果雷达系统的占空比为10%,可能有10个不同的雷达可以及时分离。
如图5所示是射频频率和时隙分离的雷达信号没有受到任何干扰的情况。
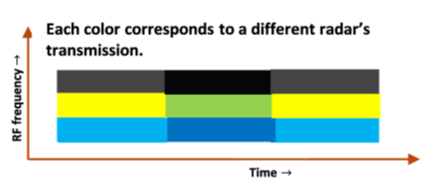 图5 射频频率和时隙分离
图5 射频频率和时隙分离
频率分离很容易实现,但时隙管理必须有一个通用的全局定时器,以便于所有雷达进行同步,在这种情况下雷达需要进行帧数据同步。雷达可以使用一个单独的波段用于远程雷达或者近程雷达,这样就不会相互干扰,TI建议对前置雷达使用不同的波段,对后置雷达使用另一波段。
3.2 并行干扰启动时间不同
如果一个雷达制造商生产的所有雷达可以被同步到同一个时钟,每个雷达都配置了相同种类的chirp和帧参数,那么就会产生并行干扰。但是,如果每个雷达的帧距偏移到全球时间大于1us左右,就不会产生并行干扰,那么在有限的空间和相同的带宽中就可以共存大量的雷达。例如,chirp时间为100us,最大感兴趣的距离为150米,也就是说,如果发射信号在空气中传输1us,那么大约100个这样的雷达可以在相同的带宽下共存,另外同步还可以让帧一个接一个地堆叠,这样就不会干扰其他雷达。
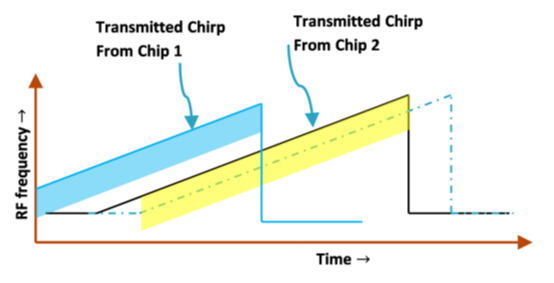 图6 并行干扰启动时间不同
图6 并行干扰启动时间不同
在TI的雷达中,通过主从模式实现附近雷达之间的同步是一种简单的方法,在这个方案中,一个雷达设备被设置为主机,并在发送帧数据时向从机产生触发信号。从机可以根据这个触发信号的延迟精确找到延迟触发后自己的数据帧。
3.3 感知和避免
在没有任何同步的情况下,雷达仍然可以执行“感知和避免”,在这种方案中,在雷达开始工作之前会感知到频谱,这是通过保持接收通道开启,而发射通道关闭的状态来实现的。
如果其他的雷达没有发射信号,则被干扰雷达的频谱是没有任何单频信号,ADC数据只存在热噪声。另外,如果有来自另一个雷达设备的发射信号,存在对应于交叉干扰发生点ADC数据的峰值。
xWR雷达可以产生250MHz/us级别的快速调频chirp信号,允许快速扫描。ADC数据交叉调频可以最大保持清楚地显示了干扰源。在图 7 中,干扰源是在 f1 和 f2 之间的一个chirp信号。因此,ADC 输出显示 f1 和 f2 之间的功率。如果扫描周期长到足以覆盖多个帧,需要使用的离散频带数来估计干扰雷达的数量。用户还可以估计啁啾占用的帧周期带宽。最重要的是,用户可以找到可以进行无干扰传输的免费频谱或时隙。当识别出干扰后 ,雷达可以在干扰不活跃的区域发射信号。
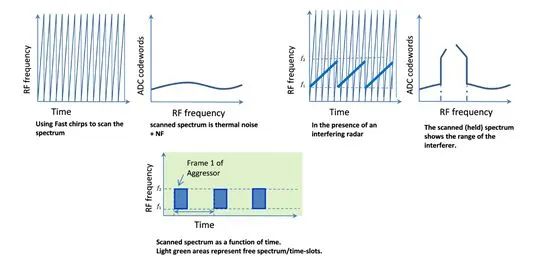 图7 干扰信号
图7 干扰信号
3.4 天线极化
如果干扰雷达使用水平极化天线发射信号,则被干扰雷达使用垂直极化天线作为接收天线,这样会使得干扰雷达的信号在被干扰雷达的天线上衰减大约10dB,不过这种方案需要天线设计领域的专业知识。
4. 干扰定位与缓解
在许多情况下不可避免交叉干扰,若不进行任何处理则会增加噪声电平,使得弱目标淹没于噪声之中。本节通过定位和缓解来降低干扰。
4.1 干扰定位
有两种方法可以实现干扰定位。
首先在ADC原始数据中找到异常信号,强交叉干扰的数据会存在明显的状态。例如,在获取的ADC采样点的时域信号中,在干扰的交叉点的地方,第一个采样点的幅度有很大的跃迁,因此可以设置一个合适的阈值,幅度超过这个阈值则标记为干扰影响。图8显示了一个ADC采样信号的时域波形,其中干扰清晰可见。若用一个简单的差分滤波器抑制其他频率的信号,则干扰信号更加明显。
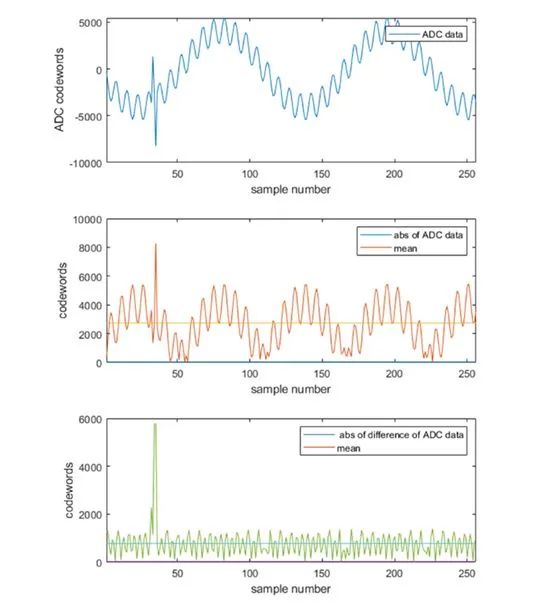 图8 干扰定位
图8 干扰定位
由于XWR器件具有复杂的基带,可以区分正频率和负频率,但是发射信号的延迟信号(目标回波信号)频率永远不可能是负的。因此,如果雷达发射信号的调频斜率为正,则所有有效对象(目标回波信号)的频率都为正(即它们位于信号频带内)。任何在负频率(图像频段)的信号都可能受到干扰,信号波段(蓝色)要强于图像波段(红色),当出现交叉干扰时,图像波段的幅度会突然上升,通过这种方法来定位弱干扰,如图9所示。
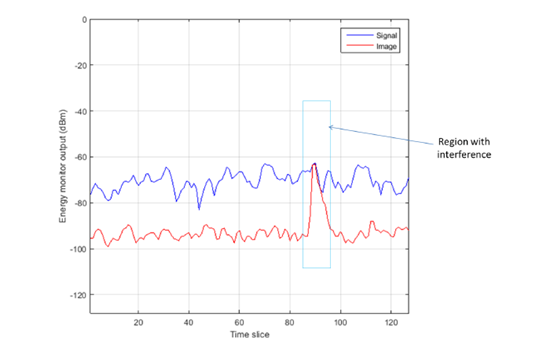 图9 弱干扰定位
图9 弱干扰定位
4.2 干扰缓解
找到干扰的位置后,我们想要降低干扰,缓解的意思是修复干扰区域的过程。最简单的缓解方法是将干扰区域置零,然而这样做的副作用是产生大的旁瓣,可能会淹没弱小目标。
更优的方案是通过加窗来缓解,使用一个平滑窗来将受干扰影响的样本归零,这样的旁瓣更低,且对弱目标的检测能力更强。
最好的方法是在空白区域进行线性插值,使用干扰前的最后一个ADC采样点和干扰周期后的第一个ADC采样点。因为最强的反射面可能离雷达很近,因此频率更低,这种方法比较有效。如图10所示。
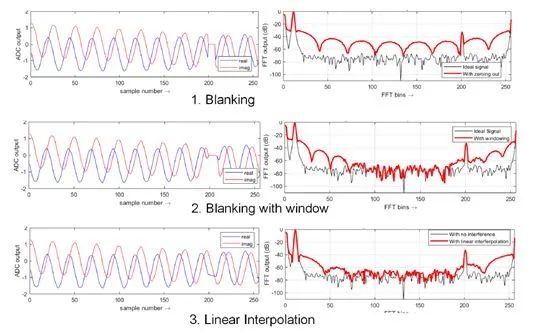 图10 三种干扰缓解方案比较
图10 三种干扰缓解方案比较
干扰缓解是一个比较热的研究领域,可能有比这里阐述的三种缓解方案更复杂,然而,随着缓解方案的复杂,必须考虑芯片处理的速度。
5.抖动与随机化
当并行干扰发生时,整个调频周期的信号都被干扰,并且难以修正,因此定位和抑制不是有效的方案。
因此,并行干扰可以通过一种称为调频抖动或者调频随机化的过程来减弱,在这个过程中调频信号的某些参数被随机化,例如相位随机。由于干扰雷达不知道被干扰雷达的随机化方法,并行干扰会在多普勒处理过程中扩散。调频信号的起始相位可以使用逐渐调频移相器API或二进制移相器进行随机化。此外还有很多参数可以随机化,如调频斜率、调频起始频率、调频空闲时间等等。
图11显示了由并行干扰引起的虚假目标如何通过随机二进制相位调制(相位抖动)在多普勒中扩散,并通过调频空闲时间抖动进一步扩散。如果不使用随机化方法,并行干扰就会以虚假目标的方式出现,如果采用随机化方法,则干扰的峰值就会因抖动而被破坏。
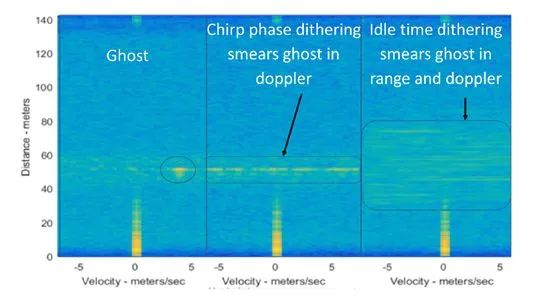 图11 并行干扰抖动消除
图11 并行干扰抖动消除
随机化的工作原理是通过不同调频信号破坏干扰雷达调频信号的一致性,从而减少他们在二维处理中的影响。这种减少大约是一帧调频数的10log10倍,当干扰雷达的相干性被破坏时,CFAR算法就可以用来去除干扰的影响。
在多普勒处理过程中,抖动方案引入了更多的复杂情况,因为必须应用一些校正方法,例如,调频信号相位抖动可以通过在多普勒处理之前对调频信号增加一个相反的移相器来纠正。某些抖动方法,如空闲时间抖动,可以在多普勒引入较高的噪声电平,因此需要谨慎使用。
6.结论
雷达相互干扰是多个雷达部署的绊脚石,如果没有考虑这一点,将会导致出现检测失败、虚假目标以及雷达探测范围降低等情况,使用不同的方法如随机化、抖动、频率规划、定位干扰以及缓解,都有可能抑制干扰,使得系统更加稳定。
7.参考文献
-
Sriram Murali, Karthik Subburaj, Brian Ginsburg and Karthik Ramasubramanian, Interference Detection in FMCW Radar Using A Complex baseband Oversampled Receiver, https://ieeexplore.ieee.org/document/8378800。
文章来源于网络、目的在于分享学习,版权归原作者所有



编辑推荐




最新资讯
-
Rivian与MAE合作定制电动车测试设备安装项
2025-04-10 14:41
-
重型商用车辆和客车的动力学——操纵性
2025-04-10 14:40
-
新能源汽车VCU、BMS、MCU控制器图解
2025-04-10 14:39
-
陶琳回应电动车辐射高:特斯拉辐射值远低于
2025-04-10 13:14
-
nCode2025版本发布说明
2025-04-10 13:12
