




 广告
广告





















































基于卡尔曼滤波的道路纵坡估计方法

道路坡度是车辆动力学控制策略中的重要参数,但精确的道路坡度很难实时获取。道路坡度的变化会影响汽车的起步、行进、驻坡等行驶状况,因此道路坡度估计对于提高汽车行驶性能十分重要。因此,本文采用一种基于卡尔曼滤波的道路坡度估计方法。通过分析汽车行驶模型和车辆底盘信息,根据车辆纵向行驶速度,使用卡尔曼滤波估计当前车辆加速度,分析车辆在带有坡度路面的受力情况和传感器(IMU)对车辆加速度测量原理分析,估计当前坡度。同时,比较了该算法与通过水平仪等工具对坡度真实值的测量结果。实车实验结果表明:该方法能在不使用额外传感器的情况下,较准确地实时估计道路坡度。
1. 基于卡尔曼滤波估计加速度
首先通过车辆底盘信息中得到车辆行驶的速度,建立匀加速(CA)模型,进而可以通过当前车辆的速度估计出车辆真实的加速度。
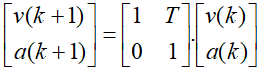
即
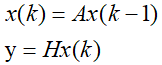
由于实验车辆得到的加速度信息是IMU测得,其中包含重力的分力加速度和车辆真实的加速度,真实的加速度信息不能直接得到,我们用车辆底盘信息中的车辆实时速度来对车辆实际加速度进行估计,所以H矩阵的建立方法如下。
(2)利用卡尔曼滤波通过速度信息估计车辆当前加速度和位移,其中通过卡尔曼滤波估计的加速度是车辆实际加速度。有关卡尔曼滤波算法的理论知识可参阅公众号其他文章,卡尔曼滤波估计加速度算法如下:
①计算先验状态估计值
②计算先验误差协方差

③计算卡尔曼修正矩阵

④更新观测值
其中Z(k)为输入的速度测量信息。
⑤更新误差协方差

2. IMU传感器工作原理
(1)惯性测量单元(Inertial Measurement Unit,IMU)主要用来检测和测量加速度、倾斜、冲击、振动、旋转和多自由度运动。在其内部正交的三轴上安装加速度计和陀螺仪,共6个自由度,用来测量三维空间中的角速度和加速度。车辆上所用两轴IMU如下图所示,当车辆在带有坡度路面行驶过程中,通过IMU测出的加速度是车辆当前真实的加速度和重力分力作用在车辆的加速度之和。

(2)对车辆加速度测量进行分析如下,可方便我们更直观的理解坡度估计问题,进而建立坡度估计的求解公式。
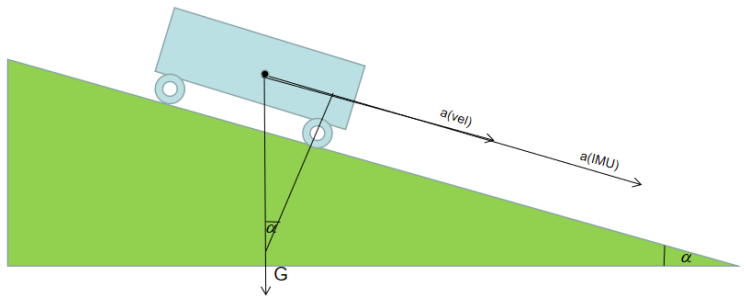
通过对车辆在纵坡上所受到的力进行加速度分析,车辆在上坡和下坡时除了受到自身加速影响还会受到自身重力加速的影响,如下所示

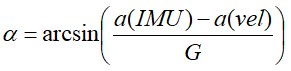
所以通过对车辆加速度的分析再结合传感器测出的数据我们可通过推导求出当前车辆所在坡的坡度
3.实车验证
本次参数辨识的数据由实验车测量获得,试验车如下图所示。

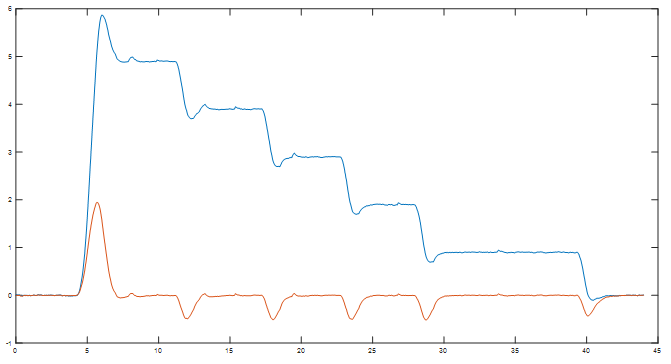
使用卡尔曼滤波通过车辆底盘信息中的速度信息估计车辆的实际加速度,估计结果如下图所示。
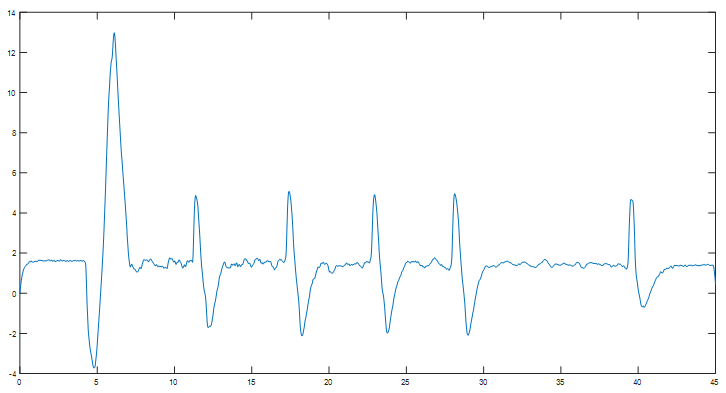
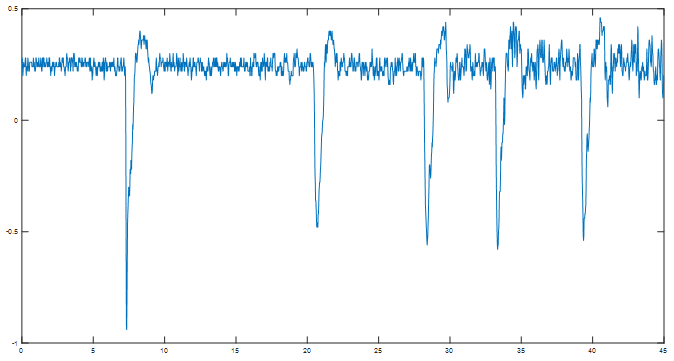
传感器(IMU)测得车辆在下坡时的加速度值,借此与卡尔曼滤波估计出的加速度相减,通过计算可估计当前坡度。传感器测量的加速度值如下图所示。
坡度估计结果如下图所示。为了检验估计结果的准确性,实地测量当前道路的坡度值为1.7度左右,可见结果与估计的结果相近。当车辆匀速行驶时,卡尔曼滤波估计所得的坡度与真实坡度相同,当车辆加减速时,IMU和卡尔曼滤波估计的加速度都存在一定误差,且由于车辆的俯仰运动和惯性导致测量结果存在一定波动,在实车使用时可采用低通滤波等方法对突变测量值进行处理。



编辑推荐




最新资讯
-
大卓智能端到端直播实测,16公里复杂路段挑
2025-04-25 17:16
-
《汽车轮胎耐撞击性能试验方法-车辆法》等
2025-04-25 11:45
-
“真实”而精确的能量流测试:电动汽车能效
2025-04-25 11:44
-
GRAS助力中国高校科研升级
2025-04-25 10:25
-
梅赛德斯-AMG使用VI-CarRealTime开发其控制
2025-04-25 10:21
